Как сделать ШИМ блок питания (контроллер)
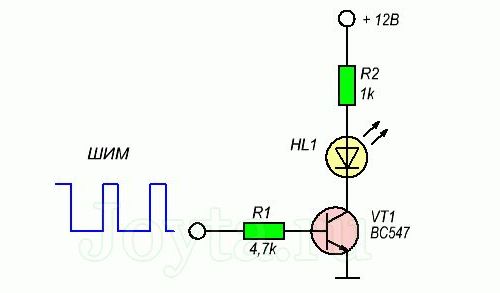
Как вы уже поняли, сердцем ШИМ контроллера будет мультивибратор или модулятор. Мультивибратор можно сделать даже на двух транзисторах, в виде самого рядового мультивибратора. А модулятор можно сделать на базе микроконтроллера. Чаще всего применяются именно микроконтроллеры. После остается лишь преобразовать низкий сигнал в управляющий силовой. Скажем с помощью транзистора. Пример для светодиода.
Если наша нагрузка имеет индуктивную составляющую, то транзистор защищается с помощью диода, который подключается параллельно нагрузке.
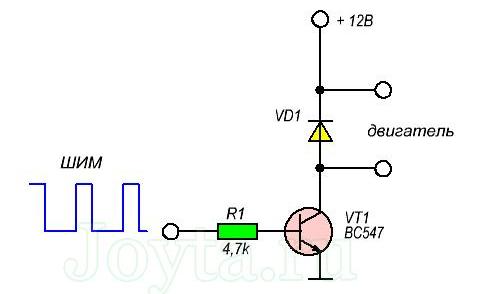
Это вроде того, как диод используется при управлении транзистором реле. В данном случае обмотка двигателя также может выдать высокий ток, который будет теперь идти не только через транзистор, но и через диод. О конкретных примерах БП ШИМ можно узнать из статьи «Драйвер для светодиодов».
Сильные и слабые стороны импульсных источников
Если сравнивать аналоговые и импульсные устройства одинаковой мощности, то у последних будут следующие преимущества:
- Небольшие размеры и вес, за счет отсутствия низкочастотного понижающего трансформатора и управляющих элементов, требующих отвода тепла при помощи больших радиаторов. Благодаря применению технологии преобразования высокочастотных сигналов можно уменьшить емкость конденсаторов, используемых в фильтрах, что позволяет устанавливать элементы меньших габаритов.
- Более высокий КПД, поскольку основные потери вызывают только переходные процессы, в то время как в аналоговых схемам много энергии постоянно теряется при электромагнитном преобразовании. Результат говорит сам за себя, увеличение КПД до 95-98%.
- Меньшая стоимость за счет применения мене мощных полупроводниковых элементов.
- Более широкий диапазон входного напряжения. Такой тип оборудования не требователен к частоте и амплитуде, следовательно, допускается подключение к различным по стандарту сетям.
- Наличие надежной защиты от КЗ, превышения нагрузки и других нештатных ситуаций.
К недостаткам импульсной технологии следует отнести:
Наличие ВЧ помех, это является следствием работы высокочастотного преобразователя. Такой фактор требует установки фильтра, подавляющего помехи. К сожалению, его работа не всегда эффективна, что накладывает некоторые ограничения на применение устройств данного типа в высокоточной аппаратуре.
Особые требования к нагрузке, она не должна быть пониженной или повышенной. Как только уровень тока превысит верхний или нижний порог, характеристики напряжения на выходе начнут существенно отличаться от штатных. Как правило, производители (в последнее время даже китайские) предусматривают такие ситуации и устанавливают в свои изделия соответствующую защиту.
Откуда берётся ШИМ
Вариант 1 — аналоговый
ШИМ сигнал создаётся специально сконструированными устройствами – генераторами ШИМ сигнала или генераторами прямоугольных импульсов. Они могут быть собраны как на аналоговой базе, так и на основе микроконтроллеров, как в виде схемы из нескольких транзисторов, так и в виде интегральной микросхемы.
Самый простой вариант это микросхема NE555, собирается всё по схеме:
Схема ШИМ генератора на NE555
Но если лень разбираться и паять, то китайцы за нас всё уже давно сделали.
ШИМ генератор на NE555
Стоит $0,5, работает стабильно при питании от 5 до 16 вольт
Выдаёт ШИМ сигнал амплитудой в 5 вольт, скважность можно менять подстроечным резистором (вон та синяя штуковина с вырезом под отвертку). При желании можно заменить подстроечный резистор на переменный и получим удобную ручку регулировки
Вариант 2 – цифровой
Более сложный для новичка – использование микроконтроллера, но вместе с тем более интересный и дающий широкие возможности. Звучит страшно, но самом деле реализуется довольно просто.
В качестве микроконтроллера удобнее всего взять отладочную плату ардуино.
Как с ней работать написано вот здесь. Подключаем ардуинку к компьютеру и заливаем в неё вот такой наисложнейший код:
void setup() {
pinMode(3,OUTPUT); // опреднляем пин D3 как выход
}
void loop() {
int duty = 30; // определяем скважность равной 30%
int value = 255/10*duty; // переводим значение скважности в 8 битный формат
analogWrite(3, value); // выводим ШИМ значением value на пин D3
1
2
3
4
5
6
7
voidsetup(){
pinMode(3,OUTPUT);// опреднляем пин D3 как выход
}
voidloop(){
intduty=30;// определяем скважность равной 30%
intvalue=25510*duty;// переводим значение скважности в 8 битный формат
analogWrite(3,value);// выводим ШИМ значением value на пин D3
Далее цепляемся осциллографом к пину D3 и видим:
ШИМ скважность 30%
Сигнал частотой (Freq) -526 Гц, амплитудой (Vmax)- 5 вольт и скважностью (duty) – 30.9 %. Меняем скважность в коде — меняется и скважность на выходе
Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью
Меняем скважность в коде — меняется и скважность на выходе. Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью
Простой ШИМ регулятор

Регулировать напряжение питания мощных потребителей удобно с помощью регуляторов с широтно-импульсной модуляцией. Преимущество таких регуляторов заключается в том, что выходной транзистор работает в ключевом режиме, а значить имеет два состояния — открытое или закрытое. Известно, что наибольший нагрев транзистора происходит в полуоткрытом состоянии, что приводит к необходимости устанавливать его на радиатор большой площади и спасать его от перегрева.
Предлагаю простую схему ШИМ регулятора. Питается устройство от источника постоянного напряжения 12В. При указанном экземпляре транзистора, выдерживает ток до 10А.
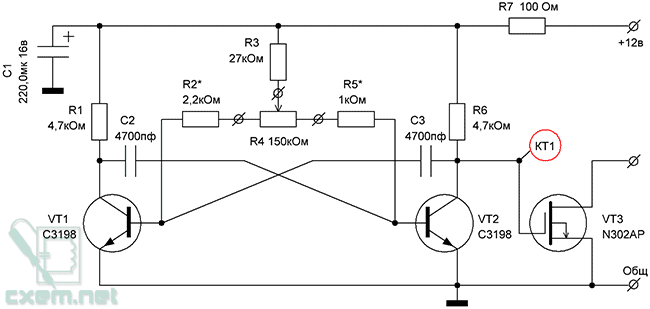
Рассмотрим работу устройства: На транзисторах VT1 и VT2 собран мультивибратор с регулируемой скважностью импульсов. Частота следования импульсов около 7кГц
С коллектора транзистора VT2 импульсы поступают на ключевой транзистор VT3, который управляет нагрузкой. Скважность регулируется переменным резистором R4. При крайнем левом положении движка этого резистора, см. верхнюю диаграмму, импульсы на выходе устройства узкие, что свидетельствует о минимальной выходной мощности регулятора. При крайнем правом положении, см. нижнюю диаграмму, импульсы широкие, регулятор работает на полную мощность.
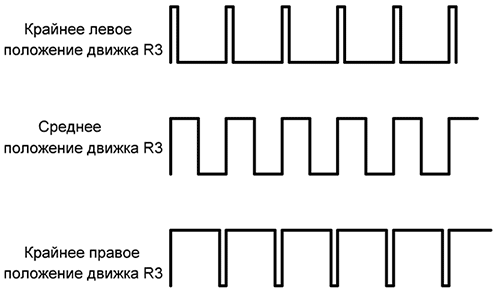
Диаграмма работы ШИМ в КТ1
С помощью данного регулятора можно управлять бытовыми лампами накаливания на 12 В, двигателем постоянного тока с изолированным корпусом. В случае применения регулятора в автомобиле, где минус соединён с корпусом, подключение следует выполнять через p-n-p транзистор, как показано на рисунке. Детали: В генераторе могут работать практически любые низкочастотные транзисторы, например КТ315, КТ3102. Ключевой транзистор IRF3205, IRF9530. Транзистор p-n-p П210 заменим на КТ825, при этом нагрузку можно подключать на ток до 20А!
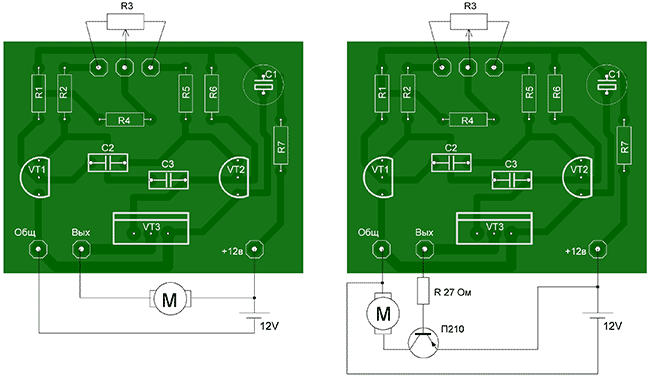
Варианты включения ШИМ регулятора
И в заключении следует сказать, что данный регулятор работает в моей машине с двигателем обогрева салона уже более двух лет.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
| VT1, VT2 | Биполярный транзистор | KTC3198 | 2 | Поиск в магазине Отрон | В блокнот | |
| VT3 | Полевой транзистор | N302AP | 1 | Поиск в магазине Отрон | В блокнот | |
| C1 | Электролитический конденсатор | 220мкФ 16В | 1 | Поиск в магазине Отрон | В блокнот | |
| C2, C3 | Конденсатор | 4700 пФ | 2 | Поиск в магазине Отрон | В блокнот | |
| R1, R6 | Резистор | 4.7 кОм | 2 | Поиск в магазине Отрон | В блокнот | |
| R2 | Резистор | 2.2 кОм | 1 | Поиск в магазине Отрон | В блокнот | |
| R3 | Резистор | 27 кОм | 1 | Поиск в магазине Отрон | В блокнот | |
| R4 | Переменный резистор | 150 кОм | 1 | Поиск в магазине Отрон | В блокнот | |
| R5 | Резистор | 1 кОм | 1 | Поиск в магазине Отрон | В блокнот | |
| R7 | Резистор | 100 Ом | 1 | Поиск в магазине Отрон | В блокнот | |
| Добавить все |
Управление вентилятором
Простейший метод управления вентилятором — отсутствие какого-либо управления вообще. Вентилятор просто запускается на максимальной скорости и работает все время. Преимущества такого управления — гарантированное стабильное охлаждение и очень простые внешние цепи. Недостатки — уменьшение срока службы вентилятора, максимальное энергопотребление, даже когда охлаждение не требуется, и непрерывный шум.
Следующий простейший метод управления — термостатический или on/off. В этом случае вентилятор включается только тогда, когда требуется охлаждение. Условие включения вентилятора устанавливает пользователь, обычно это какое-то пороговое значение температуры.
Подходящий датчик для on/off управления — это ADM1032. Он имеет выход THERM, который управляется внутренним компаратором. В нормальном состоянии на этом выходе высокий логический уровень, а при превышении порогового температурного значения он переключается на низкий. На рисунке 3 показан пример цепи с использованием ADM1032.
Рисунок 3. Пример on/off управления
Недостаток on/off контроля — это его ограниченность. При включении вентилятора, он запускается на максимальной скорости вращения и создает шум. При выключении он полностью останавливается и шум тоже прекращается. Это очень заметно на слух, поэтому с точки зрения комфорта такой способ управления далеко не оптимальный.
При линейном управлении скорость вращения вентилятора изменяется за счет изменения напряжения питания. Для получения низких оборотов напряжение уменьшается, для получения высоких увеличивается. Конечно, есть определенные границы изменения напряжения питания.
Рассмотрим, например, вентилятор на 12 вольт. Для запуска ему требуется не меньше 7 В и при этом напряжении он, вероятно, будет вращаться с половинной скоростью от своего максимального значения. Когда вентилятор запущен, для поддержания вращения требуется уже меньшее напряжение. Чтобы замедлить вентилятор, мы можем понижать напряжение питание, но до определенного предела, допустим, до 4-х вольт, после чего вентилятор остановится. Эти значения будут отличаться в зависимости от производителя, модели вентилятора и конкретного экземпляра.
5-и вольтовые вентиляторы позволяют регулировать скорость вращения в еще меньшем диапазоне, поскольку их стартовое напряжение близко к 5 В. Это принципиальный недостаток данного метода.
Линейное управление вентилятором можно реализовать на микросхеме ADM1028. Она имеет управляющий аналоговый выход, интерфейс для подключения диодного температурного датчика, который обычно используется в процессорах и ПЛИС, и работает от напряжения 3 — 5.5 В. На рисунке 4 показан пример схемы для реализации линейного управления. Микросхема ADM1028 подключается ко входу DAC.
Рисунок 4. Схема для реализации линейного управления 12-и вольтового вентилятора
Линейный метод управления тише, чем предыдущие. Однако, как вы могли заметить, он обеспечивает маленький диапазон регулировки скорости вращения вентилятора. 12-и вольтовые вентиляторы при напряжении питания от 7 до 12 В, позволяют устанавливать скорость вращения от 1/2 от максимума до максимальной. 5-и вольтовые вентиляторы при запуске от 3,5 — 4 В, вращаются практически с максимальной скоростью и диапазон регулирования у них еще меньше. Кроме того, линейный метод регулирования не оптимален с точки зрения энергопотребления, потому что снижение напряжения питания вентилятора выполняется за счет рассеяния мощности на транзисторе (смотри рисунок 4). И последний недостаток — относительная дороговизна схемы управления.
Системы управления микросхемами
Важно знать не только из чего состоят микросхемы шим — контроллеров, но и какие существуют виды самих систем. В настоящее время доступно две основных системы широко — импульсной модуляции в которых шим — контроль принимает активное участие
Вот их некоторые особенности:
Цифровая система. В цифровой шим — системе все существующие процессы описываются цифровыми данными. Так на выходе в цифровом формате формируется показатель уровня напряжения. Заметим, что уровень напряжения может быть высокий (измеряется как 100%) и низкий (0%). Однако показатели напряжения, благодаря современным технологиям, можно изменять
Как? Необходимо изменить скважность импульсов. Только тогда изменится и напряжение
Любые совершенные перемены имеют свою частоту. Именно шим — контролёры регулируют описанные процессы. С их помощью вся система будет успешно работать. Эта специальная микросхема по праву называется сердцем всей цифровой системы шим — модуляторов.
А вот получить на выходе нужный сигнал можно как с программным, так и аппаратным методом.
Аппаратный метод. Получение сигнала этим способом происходит с помощью специального таймера, который изначально встроен в цифровую систему. Такой таймер генерирует или способствует включению импульсов на определённых этапах вывода сигнала.
Программный метод. В этом случае получения сигналов происходит посредством выполнения специальных программных команд. У программного способа больше возможностей, нежели у аппаратного. В то же время использования этого метода получения сигналов может занять много памяти.
А что можно сказать о «сердце системы». У шима — контролёра, который активно применяется в цифровых модуляторах есть свои преимущества. Стоит помнить о следующих:
- Низкая стоимость.
- Стабильная работа.
- Высокая надёжность.
- Возможность экономить энергию.
- высокая эффективность преобразования сигналов.
Все перечисленные преимущества делают цифровую систему более востребованной среди потребителей.
Аналоговый модулятор. Принцип работы аналогового модулятора в корне отличается от принципа работы цифрового Вся суть работы такого модулятора состоит в сравнении двух сигналов. Эти сигналы отличаются между собой порядком частоты. Операционный усилитель — это главный элемент аналогового модулятора, который отвечает за сравнение сигналов. Сравнение сигналов осуществляется на выходе. В качестве сравнения усилитель используется два сигнала. Первый — пилообразное напряжение высокой частоты. Второй сигнал — низкочастотное напряжение. После сравнения на свет появляются импульсы прямоугольной формы. Длительность импульсов напрямую зависят от модулирующего сигнала.
Шим — контроллер в импульсных блоках питания
Многие электрические приборы сегодня оснащены специальными блоками питания. Эти блоки помогают преобразить один вид напряжения в другой. В процессе преобразования энергии принимают участия два устройства:
- Импульсный блок питания.
- аналоговые трансформаторные устройства.
В этой статье мы больше внимания обратим на первое устройство, так как именно в нём используется шим — контролёр.
Характеристики ШИМ сигнала
Важными характеристиками ШИМ сигнала являются:
амплитуда (U);
частота (f);
скважность (S) или коэффициент заполнения D.
Амплитуда в вольтах задается в зависимости от нагрузки. Она должна обеспечивать номинальное напряжение питания потребителя.
Частота сигнала, модулируемого по ширине импульса, выбирается из следующих соображений:
Чем выше частота, тем выше точность регулирования.
Частота не должна быть ниже времени реакции устройства, которым управляют с помощью ШИМ, иначе возникнут заметные пульсации регулируемого параметра.
Чем выше частота, тем выше коммутационные потери. Он возникают из-за того, что время переключения ключа конечно. В запертом состоянии на ключевом элементе падает все напряжение питания, но ток почти отсутствует. В открытом состоянии через ключ протекает полный ток нагрузки, но падение напряжения невелико, так как проходное сопротивление составляет единицы Ом. И в том, и в другом случае рассеяние мощности незначительно. Переход от одного состояния к другому происходит быстро, но не мгновенно. В процессе отпирания-запирания на частично открытом элементе падает большое напряжение и одновременно через него идёт значительный ток. В это время рассеиваемая мощность достигает высоких значений. Этот период невелик, ключ не успевает значительно разогреться. Но с повышением частоты таких временных промежутков за единицу времени становится больше, и потери на тепло повышаются
Поэтому для построения ключей важно использование быстродействующих элементов.
При управлении электродвигателем частоту приходится уводить за пределы слышимого человеком участка – 25 кГц и выше. Потому что при более низкой частоте ШИМ возникает неприятный свист.
Эти требования часто находятся в противоречии друг к другу, поэтому выбор частоты в некоторых случаях – это поиск компромисса.
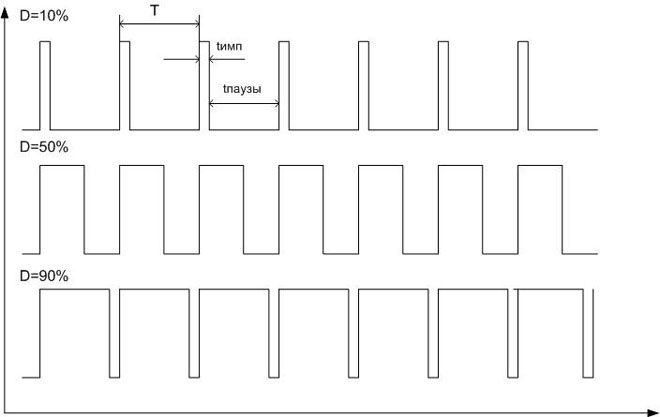
Величину модуляции характеризует скважность. Так как частота следования импульсов постоянна, то постоянна и длительность периода (T=1/f)
Период состоит из импульса и паузы, имеющих длительность, соответственно, tимп и tпаузы, причем tимп+tпаузы=Т. Скважностью называется отношение длительности импульса к периоду – S=tимп/T. Но на практике оказалось удобнее пользоваться обратной величиной – коэффициентом заполнения: D=1/S=T/tимп. Еще удобнее выражать коэффициент заполнения в процентах.
ШИМ-контроллеры в составе блоков питания
Блок питания является неотъемлемым элементом большинства современных девайсов. Срок его эксплуатации практически ничем не ограничен, но от его исправности во многом зависит безопасность работы подконтрольного устройства. Спроектировать блок питания можно и своими руками, изучив принцип его действия. Основная цель – формирование нужной величины напряжения питания, обеспечение её стабильности. Для большинства мощных устройств гальванической развязки, основанной на действии трансформатора, будет недостаточно, да и подобранный элемент явно удивит пользователей своими габаритами.

Увеличение частоты тока питания позволяет существенно уменьшить размеры используемых компонентов, что обеспечивает популярность блоков питания, работающих на частотных преобразователях. Один из самых простых вариантов реализации питающих элементов – блок-схема, состоящая из прямого и обратного преобразователей, генератора и трансформатора. Несмотря на видимую простоту реализации таких схем, на практике они демонстрируют больше недочетов, чем преимуществ. Большинство получаемых показателей стремительно изменяются под влиянием скачков напряжения питания, при загрузке выхода преобразователя и даже при увеличении температуры окружающей среды. ШИМ-контроллеры для блоков питания дают возможность стабилизировать схему, а также воплотить множество дополнительных функций.
Что такое ШИМ сигнал
ШИМ – это сигнал с различными интервалами ON и OFF сигнала (различными продолжительностями включения). Время, в течение которого сигнал имеет высокий уровень, называется временем включения (“on time”), а время, в течение которого сигнал имеет низкий уровень — время выключения (“off time”). У ШИМ сигнала есть два параметра, которые мы рассмотрим далее.
Коэффициент заполнения (скважность) ШИМ
Процент времени, в течение которого ШИМ сигнал имеет высокий уровень, называется коэффициентом заполнения (скважностью). К примеру, коэффициент заполнения ШИМ сигнала с периодом (длительностью) 100 мс, в котором в течение 50 мс сигнал имеет высокий уровень и в течение 50 мс имеет низкий уровень, равен 50%
Аналогично, если для такой же длительности (100 мс) сигнал 25 мс остается на высоком уровне и 75 мс на низком, то коэффициент заполнения для такого сигнала будет равен 25%. Для его определения нам необходимо знать только длительность высокого уровня сигнала (длительность низкого уровня легко определить как разность между периодом сигнала и длительность сигнала высокого уровня). Более наглядно ШИМ сигнал представлен на следующем рисунке.
Формула для расчета коэффициента заполнения/скважности (Duty Cycle) выглядит следующим образом:
Duty Cycle (%) = On Time/(On Time + Off Time)
Таким образом, изменяя коэффициент заполнения ШИМ сигнала мы можем изменять интенсивность свечения светодиода.
Выбор режима ШИМ
После выбора нужного нам коэффициента заполнения необходимо выбрать еще режим ШИМ – то есть то, каким образом ШИМ будет работать. Существует три типа ШИМ:
- Быстрая ШИМ (Fast PWM).
- ШИМ с коррекцией фазы (Phase Correct PWM).
- ШИМ с коррекцией фазы и частоты (Phase and Frequency Correct PWM).
Быстрая ШИМ используется в случаях когда нам не важна фаза импульсов, например, управление скоростью вращения двигателя или яркостью свечения светодиода.
Для генерации быстрой ШИМ нам необходимо будет запустить на таймере счет и когда он досчитает до определенного значения сбрасывать значение таймера снова в ноль. Таким образом мы установим период следования ШИМ импульсов. Таким образом мы можем контролировать импульс, устанавливая высокое значение сигнала когда счетчик таймера досчитает до определенного значения. А когда счетчик будет возвращаться в 0 на это время сигнал будет низкого уровня. Таким образом, мы имеем большую гибкость в управлении ШИМ сигналом используя всего лишь один таймер.
Основные схемы силовой части
В зависимости от назначения ИС, можно выделить три базовых модели его построения:
- понижающая;
- повышающая;
- инвертирующая.
Независимо от конструктивного исполнения и назначения ИС, устройствами, использующимися в роли ключа, могут быть:
- тиристор;
- транзистор (биполярный или полевой).
Основная задача подобного элемента – отрываться или закрываться по команде, поступающей на управляющий электрод.
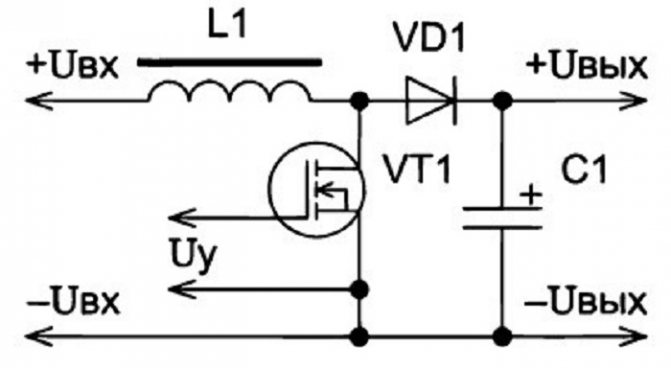
Преобразователь с понижением напряжения
Обычно уменьшить величину напряжения необходимо чаще, потому такие ИС более востребованы.
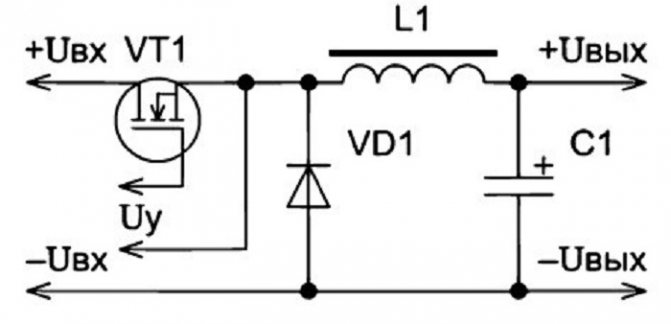
Простейшая схема понижающего ИС
У понижающего стабилизатора напряжения, приведённого на схеме, ключ на полевом транзисторе VT1 откроется при подаче на него управляющего напряжения. Ток от плюсовой клеммы будет поступать на нагрузку через сглаживающий дроссель L1. Включенный параллельно в цепь диод VD1 в данный момент не пропускает ток. После размыкания ключа цепь тока следующая: дроссель L1 – нагрузка – общий провод – диод VD1 – дроссель L1. При этом ток, проходящий через дроссель, не прекратится мгновенно, а будет постепенно уменьшаться.
Важно! У дросселей, имеющих большую индуктивность, он не становится равным нулю до начала следующего открытия ключа. Установка таких элементов нецелесообразна из-за увеличения габаритов и стоимости
Конденсатор C1 в это время будет разряжаться на нагрузку и поддерживать U вых. Емкость C вместе с индуктивностью L образует фильтр, снижающий размах пульсаций.
Преобразователь с повышением напряжения
В отличие от понижения Uвх, этот тип схем используют для питания цепей нагрузки, которым для работы необходимо напряжение выше, чем у источника.
Повышающий ИС
Компоненты схемы те же самые, но включены иначе. При открытом транзисторе диод закрыт, и на дросселе линейно нарастает ток. При запирании ключа ток начинает двигаться по цепи: плюсовая клемма – дроссель L1 – диод VD1 – нагрузка – минусовая клемма. Конденсатор C1 в это время будет заряжаться. Он будет поддерживать ток на нагрузке во время своего разряда на неё при следующем открытии ключа.
Инвертирующий преобразователь
Подобная сборка также не имеет гальванической развязки между входным и выходным каскадами. В ней совсем иное включение дросселя, конденсатора и нагрузки. Они расположены параллельно.
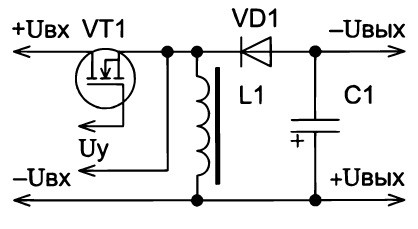
Инвертирующий ИС
При открытом ключе VT1 ток протекает по цепи: плюсовая клемма – транзистор – дроссель – минусовая клемма. Дроссель накапливает энергию при содействии магнитного поля. Когда транзистор закрывается, то цепь прохождения тока меняется: дроссель – конденсатор C1 – диод VD1 – дроссель. Энергия дросселя и энергия конденсатора будут полностью отдаваться нагрузке. Амплитуда пульсации целиком зависит от ёмкости C1. В этот момент напряжение на нагрузке не меняется, несмотря на то, что ток через С1 спадает почти до нуля.
Кстати. Выходное напряжение у инвертирующих ИС может отличаться от напряжения источника питания, как в большую, так и в меньшую сторону.
Как работает инвертор?
ВЧ модуляцию, можно сделать тремя способами:
- частотно-импульсным;
- фазо-импульсным;
- широтно-импульсным.
На практике применяется последний вариант. Это связано как с простотой исполнения, так и тем, что у ШИМ неизменна коммуникационная частота, в отличие от двух остальных способов модуляции. Структурная схема, описывающая работу контролера, показана ниже.
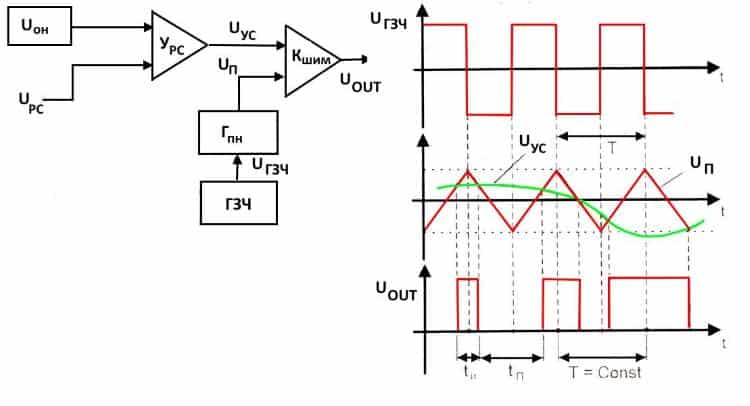
Структурная схема ШИМ-контролера и осциллограммы основных сигналов
Алгоритм работы устройства следующий:
Генератор задающей частоты формирует серию прямоугольных сигналов, частота которых соответствует опорной. На основе этого сигнала формируется UП пилообразной формы, поступающее на вход компаратора КШИМ. Ко второму входу этого устройства подводится сигнал UУС, поступающий с регулирующего усилителя. Сформированный этим усилителем сигнал соответствует пропорциональной разности UП (опорное напряжение) и UРС (регулирующий сигнал от цепи обратной связи). То есть, управляющий сигнал UУС, по сути, напряжением рассогласования с уровнем, зависящим как от тока на грузке, так и напряжению на ней (UOUT).
Читать также: Проверка емкости аккумулятора мультиметром
Данный способ реализации позволяет организовать замкнутую цепь, которая позволяет управлять напряжением на выходе, то есть, по сути, мы говорим о линейно-дискретном функциональном узле. На его выходе формируются импульсы, с длительностью, зависящей от разницы между опорным и управляющим сигналом. На его основе создается напряжение, для управления ключевым транзистором инвертора.
Процесс стабилизации напряжения на выходе производится путем отслеживания его уровня, при его изменении пропорционально меняется напряжение регулирующего сигнала UРС, что приводит к увеличению или уменьшению длительности между импульсами.
В результате происходит изменение мощности вторичных цепей, благодаря чему обеспечивается стабилизация напряжения на выходе.
Для обеспечения безопасности необходима гальваническая развязка между питающей сетью и обратной связью. Как правило, для этой цели используются оптроны.
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T. D = t/T. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения
S = T/t.
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Принцип работы ШИМ
В отличии от линейных систем, где мощность регулируется путём снижения электрических параметров (тока или напряжения), при использовании ШИМ мощность, передаваемая потребителю, регулируется временем импульсов, что существенно повышает эффективность работы контроллера. В аналоговых системах остаточная мощность рассеивалась в виде тепла, здесь же при снижении потребления остаточная мощность просто не используется.
Основная характеристика ШИМ – СКВАЖНОСТЬ (процент заполнения) – процентное соотношение длительности импульсов к периоду. На рисунке ниже изображено 5 степеней скважности прямоугольного ШИМ сигнала:. Скважность ШИМ
Скважность ШИМ
ПЕРИОД — это время за которое происходит полный цикл колебания сигнала. Измеряется в секундах. Он линейно зависит от частоты сигнала и рассчитывается по формуле:
T(перод) = 1/f(частота)
f(частота) = 1/ T(перод)
Частота ШИМ – это количество периодов (или если хотите, циклов колебаний) в единицу времени. Частота измеряется в Герцах (Гц), 1 Гц это одно колебание в 1 секунду.
Если сигнал делает 100 колебаний в секунду, значит частота равняется 100 Гц. Чем выше частота тем меньше период.
Диагностика неисправностей
Одна из часто встречающихся проблем — пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта — обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует — отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального — проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах — некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков — обрыв петли ООС или цепочки RC, деградация емкости фильтра.
Когда вам не хватает ЦАП
Даже в наш век высокоинтегрированных микросхем смешанных сигналов нередко можно встретить микроконтроллер, в котором нет цифро-аналогового преобразователя. Программируемая логика в этом отношении еще более проблематична; я никогда не слышал об FPGA или CPLD с модулем ЦАП. И даже когда микроконтроллер имеет ЦАП, доступно может быть только один или два канала – в отличие от встроенных периферийных устройств АЦП, которые обычно включают в себя мультиплексор, который позволяет одному модулю АЦП преобразовывать аналоговые сигналы, подключенные к нескольким, или, может быть, даже к десятку выводов портов. Итак, что вы должны делать, когда найдете микроконтроллер, который идеально подходит для вашего приложения, за исключением того, что у него нет встроенного ЦАП? Ну, самый очевидный вариант – использовать внешний ЦАП. Быстрый поиск в интернете показывает, что у вас на выбор есть как минимум тысяча моделей, некоторые из которых стоят меньше доллара и поставляются в крошечных корпусах SC70, MSOP, SOT или DFN. Но бывают случаи, когда вы не хотите добавлять в проект еще один чип. Возможно, в вашем микроконтроллере нет трех неиспользуемых выводов, которые вам понадобятся для связи по SPI; возможно, вы спешите и не хотите платить за срочную доставку; может быть, вам нужно шесть отдельных выходов ЦАП, но для шестиканального устройства недостаточно места на плате. В любом случае, если внешний ЦАП просто исключен, у вас есть альтернатива.
Похожие записи:
 Библиотеки p-cad 200x
Библиотеки p-cad 200x
 Емкость аккумулятора: в чем она измеряется, как ее измерить своими руками
Емкость аккумулятора: в чем она измеряется, как ее измерить своими руками
 Выбираем профиль для светодиодной ленты
Текстовый экран 20×4: инструкция по подключению и примеры использования
Выбираем профиль для светодиодной ленты
Текстовый экран 20×4: инструкция по подключению и примеры использования
 Ss8550 datasheet, equivalent, cross reference search
Ss8550 datasheet, equivalent, cross reference search
 Как устанавливается газовое оборудование на карбюраторный двигатель
Как устанавливается газовое оборудование на карбюраторный двигатель