ЭЛЕКТРОДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА АСИНХРОННЫЙ
Наиболее распространенный тип асинхронного двигателя – это электродвигатель с короткозамкнутым ротором типа «беличья клетка», где в наклонные пазы ротора уложен набор токопроводящих стержней, с торцов соединенных кольцами.
История этого типа электродвигателей насчитывает более сотни лет, когда было замечено, что токопроводящий предмет, помещенный в зазор сердечника электромагнита переменного тока, стремится вырваться из него за счет возникновения в нем ЭДС индукции с противонаправленным вектором.
Таким образом, асинхронный двигатель с короткозамкнутым ротором не имеет каких-либо механических контактирующих узлов, кроме опорных подшипников ротора, что обеспечивает моторам такого типа не только низкую цену, но и высочайшую долговечность.
Благодаря этому электродвигатели такого типа стали наиболее распространенными в современной промышленности.
Однако им присущи и определенные недостатки, которые приходится учитывать при проектировании асинхронных электродвигателей подобного типа:
Высокий пусковой ток – так как в момент включения асинхронного бесколлекторного электродвигателя в сеть на реактивное сопротивление обмотки статора еще не влияет магнитное поле, создаваемое ротором, возникает сильный бросок тока, в несколько раз превосходящий номинальный ток потребления.
Эту особенность работы двигателей подобного типа необходимо закладывать во все проектируемое электроснабжение во избежание перегрузок, особенно при подключении асинхронных электродвигателей к мобильным генераторам с ограниченной мощностью.
Низкий пусковой момент – электродвигатели с короткозамкнутой обмоткой имеют ярко выраженную зависимость крутящего момента от оборотов, поэтому их включение под нагрузкой крайне нежелательно: значительно увеличиваются время выхода на номинальный режим и пусковые токи, обмотка статора перегружается.
Так, например, происходит при включении глубинных насосов – в электроцепях их питания приходится учитывать пяти-семикратный запас по току.
Невозможность непосредственного запуска в цепях однофазного тока — для того, чтобы ротор начал вращаться, необходим стартовый толчок либо введение дополнительных фазных обмоток, сдвинутых по фазе друг относительно друга.
Для запуска асинхронного электродвигателя переменного тока в однофазной сети используется либо вручную коммутируемая пусковая обмотка, отключаемая после раскрутки ротора, либо вторая обмотка, включенная через фазовращательный элемент (чаще всего – конденсатор необходимой емкости).
Особенности подключения электрических двигателей рассматриваются на этой странице.
Отсутствие возможности получения высокой частоты вращения — хотя вращение ротора и не синхронизировано с частотой вращения магнитного поля статора, но и не может его опережать, поэтому в сети 50 Гц максимальные обороты для асинхронного электродвигателя с короткозамкнутым ротором – не более 3000 об/мин.
Увеличение частоты вращения асинхронного двигателя требует применения частотного преобразователя (инвертора), что делает такую систему дороже, чем коллекторный двигатель. Кроме того, при увеличении частоты возрастают реактивные потери.
Трудность организации реверса — для этого необходима полная остановка двигателя и перекоммутация фаз, в однофазном варианте – смещение фазы в пусковой или второй фазной обмотке.
Наиболее удобно использование асинхронного электродвигателя в промышленной трехфазной сети, так как создание вращающегося магнитного поля при этом осуществляется самими фазными обмотками без дополнительных приспособлений.
Фактически цепь, состоящую из трехфазных генератора и электромотора, можно рассматривать как пример электро трансмиссии: привод генератора создает в нем вращающееся магнитное поле, преобразуемое в колебания электрического тока, в свою очередь возбуждающего вращение магнитного поля в электродвигателе.
Кроме того, именно при трехфазном питании асинхронные электродвигатели имеют наибольший КПД, так как в однофазной сети создаваемое статором магнитное поле по сути может быть разложено на два противофазных, что увеличивает бесполезные потери на перенасыщение сердечника. Поэтому мощные однофазные электродвигатели как правило выполняются по коллекторной схеме.
Классификация электродвигателей
Электрические машины можно разбить на две группы, обращая внимание на особенности образования момента вращения: магнитоэлектрические и гистерезисные. Вторая группа применяется редко, у них вращение происходит за счёт перемагничивания ротора
Статор — понятие и принцип действия
Магнитоэлектрические моторы подразделяются по роду тока на модели:
- постоянного тока;
- пульсирующего тока;
- переменного тока;
- универсальные.
Универсальными моторы называются, потому что могут потреблять для работы, как постоянный, так и переменный ток.
Двигатели постоянного тока
Несмотря на то, что такие моторы могут питаться, как постоянным, так и переменным током, в основном на их обмотки подают постоянное напряжение.
Внимание! Способ переключения фаз позволяет разделять ДПТ на коллекторные и вентильные. Присутствие обратных связей по току, напряжению и скорости допускает наличие регулируемого электропривода
Коллекторные машины имеют проблемное место: щёточно-коллекторный узел (ЩКУ), который создаёт сложность в облуживании и некоторую ненадёжность в работе.
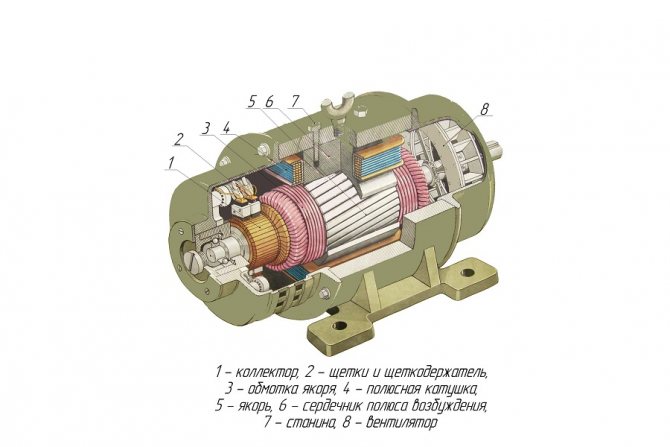
Внутреннее устройство коллекторного ДПТ
Вентильные электромоторы лишены коллектора, фазы переключает инвертор (электронный блок). У таких машин возможна обратная связь через датчик позиции ротора.
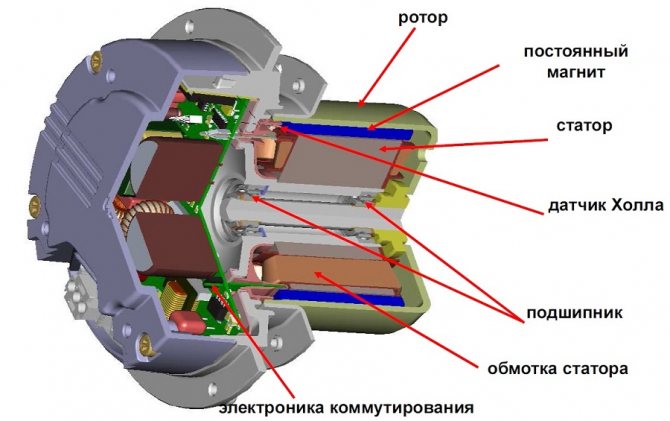
Вентильный ДПТ
Двигатели пульсирующего тока
Подобные аппараты используются на электровозах. Питание мотора осуществляется от пульсирующего тока. От ДПТ их конструктивно отличает следующее:
- присутствие компенсационной обмотки;
- увеличенное количество полюсных пар;
- шихтованные допполюса;
- шихтованные включения в каркас.
К сведению. Такой ток получается в результате сложения двух токов: постоянного и переменного, потому имеет обе составляющие. Он не меняет направления, а пульсирует, кратковременно меняя значения от максимума до минимума и не во всех случаях до нуля.
Двигатели переменного тока (ПТ)
По способу работы такие машины делятся на двигатели: синхронные и асинхронные.
Почему синхронные? Потому что скорость ротора и скорость вращающегося в статоре МП абсолютно совпадают. У асинхронных моторов скорость вращения МП в статоре выше, чем у ротора.
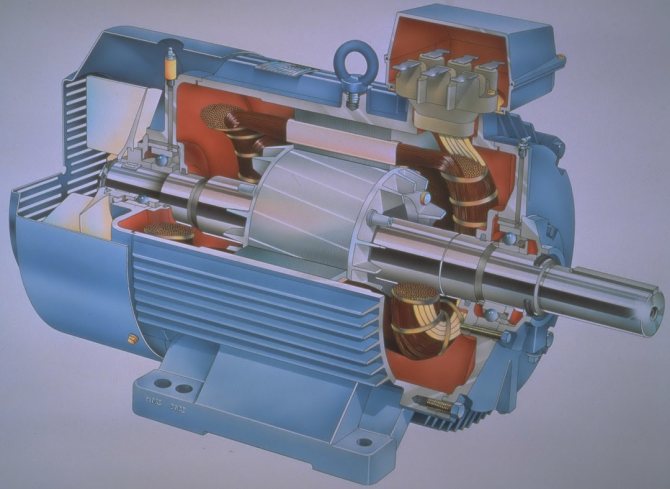
Двигатель ПТ
Универсальный коллекторный электродвигатель (УКД)
Такой тип применяется в электроинструментах: это отрезная машинка, дрель, триммер и др. Незаменим там, где нужны высокие обороты (выше 3000 об./мин.), маленькие размеры и небольшой вес. Двигатель работает от обоих видов тока и обладает последовательно включённой обмоткой возбуждения. В электронную схему входит линейный преобразователь напряжения.
Внимание! При использовании постоянного тока напряжением 220В обмотка возбуждения подключается полностью, при переменном токе и аналогичном напряжении включение частичное. Универсальный коллекторный AC 220v SX7625
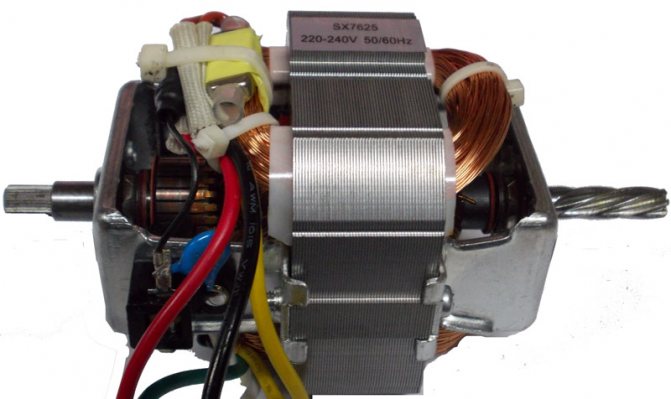
Универсальный коллекторный AC 220v SX7625
Синхронный электродвигатель возвратно-поступательного движения
Принцип действия электродвигателя заключается в том, что на штоке, который движется, установлены магниты постоянной природы. В корпус мотора вмонтирован магнитопровод с катушками, на которые подаётся ПТ. Катушки установлены так, что создаваемое ими МП заставляет двигаться шток туда-сюда.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.
Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).
Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.
Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2. а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Как работает синхронный электродвигатель?
Всего можно выделить несколько этапов работы асинхронного электродвигателя:
- Возникновение вращающего момента происходит, как только начинают взаимодействовать магнитный поток в статоре и электрический ток в роторе.
- Магнитный поток изменяет направление своего движения. Причём происходит это одновременно с реверсом тока. При помощи такого поведения получается сохранить вращение ротора в одном направлении.
- Чтобы добиться необходимой частоты вращения ротора, достаточно произвести регулировку питающего напряжения. Во многих бытовых приборах используется для этой цели простой реостат, который изменяет свое сопротивление.
Конструкция синхронного двигателя весьма ненадежная, так как очень часто изнашиваются графитовые щетки, либо ослабляются их пружины. При разрушении подшипников на валу появляется характерный неприятный звук. Со временем загрязняются ламели на коллекторе. Их можно очистить при помощи наждачной бумаги или спиртосодержащими растворами.
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.
- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов — обеспечивающие вращение, охлаждение и защиту механизма.
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- Крутящийся ротор пытается «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.
Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
- Электродвигатели постоянного токаИспользуются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
- Электродвигатели переменного токаПользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
- Шаговые электродвигателиДействуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
- СерводвигателиОтносятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
- Линейные электродвигателиОбладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
- Синхронные двигателиЯвляются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
- Асинхронные двигателиТакже, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
Похожие записи:
 Инструмент для снятия изоляции с проводов: все про устройства для зачистки кабеля
Инструмент для снятия изоляции с проводов: все про устройства для зачистки кабеля
 Развязывающий сетевой трансформатор на 230в для питания передатчиков и связной аппаратуры
Развязывающий сетевой трансформатор на 230в для питания передатчиков и связной аппаратуры
 Топ-5 самых мощных аварий на аэс
Топ-5 самых мощных аварий на аэс
 Принцип работы самовосстанавливающегося предохранителя
Принцип работы самовосстанавливающегося предохранителя
 Какая электросеть лучше для дома или квартиры: однофазная или трехфазная?
Какая электросеть лучше для дома или квартиры: однофазная или трехфазная?
 Нахлобучиваем домофонные ключи ibutton с помощью flipper zero
Нахлобучиваем домофонные ключи ibutton с помощью flipper zero