Оптимальные обороты работы двигателя.
Каждый водитель должен знать какие обороты для двигателя его автомобиля оптимальны, это знание не только поможет сэкономить немного денег на топливе и ремонте, но, возможно, и спасти жизнь, ведь не зная возможностей своего автомобиля, не умея использовать его двигатель, можно подвергнуть опасности себя и своих пассажиров.
Начнем с того, что нет универсальных оборотов для всех режимов эксплуатации
. Для прогрева двигателя необходимы одни обороты, для обгона другие, для размеренного движения по городу третьи.
Начнем с конечно же с пуска двигателя, сразу после поворота ключа, двигатель начинает работать на повышенных оборотах (по сравнению с холостым ходом). В данной ситуации это оптимальные обороты для прогрева двигателя
(обычно 1100-1200 об/мин), для подачи застывшего масла и теплового расширения шатунно-поршневой группы до рабочего размера (подробнее можно почитать здесь ). Если вы хотите продлить срок службы вашего двигателя, не стоит пытаться избавиться от них, перепрошивать ЭБУ, поддавать газку, чтобы быстрее прогреться, но и начинать движение на прогревочных оборотах не рекомендуется.
Когда ШПГ выходит на рабочую температуру, двигатель переходит на обороты холостого хода
(600-800 об/мин)— это оптимальные обороты для неподвижного автомобиля . Двигатель работает в облегченном режиме, только чтобы не заглохнуть и обеспечить минимальный расход топлива. Валы вращаются практически в свободном состоянии, они не нагружены и износа в них практически не бывает, если бы не одно НО: масляный насос тоже работает на минимальных режимах, если масло свежее и качественное, то проблем не будет, насос без проблем прогонит его по всем каналам и забросит в самые труднодоступные места, тем самым смазывая их и охлаждая. Если же масло не обладает нужными качествами, маслонасос не справляется, двигатель начинает понемногу перегреваться, еще сильнее портить масло и понемногу возникает масляное голодание и, как следствие, повышенный износ двигателя.
Итак, мы включили передачу, и начали движение. Оптимальные обороты для равномерного прямолинейного движения по ровной поверхности
обычно в диапазоне от 1800 до 2000 об/мин.. При этом режиме работы двигатель выдает ровно столько, сколько необходимо для поддержания движения с заданной скоростью с минимальным расходом топлива. Обычно двигатель и коробка передач подобраны так, что на этих оборотах обеспечивается максимально разрешенная скорость по дороге. Например 60 км/ч на четвертой скорости при 2000 оборотов или 90 км/ч на пятой скорости при 2000 оборотов. Пожалуй это идеальный режим работы двигателя с точки зрения долговечности и расхода топлива, двигатель практически не нагружен, масло равномерно распределена и все смазывает, но есть один нюанс — двигатель долго работавший на таких оборотах может подвести в самый неподходящий момент.
Ситуации на дороге бывают разные, иногда нужно просто ускорится на светофоре, чтобы успеть перестроится в нужный ряд, а иногда быстро обогнать фуру, в этом случае, оптимальными оборотами для быстрого ускорения будут обороты создающие максимальный крутящий момент
. На этих оборотах автомобилю придается наибольшее ускорение, а двигатель испытывает колоссальные нагрузки, и именно в этот момент мотор приработавшийся к 2000 оборотов может подвести. При работе двигателя шатуны двигателя, под действием инерции поршня немного вытягиваются, чем больше обороты, тем деформация сильнее (шатун длиннее). При длительной работе в щадящих режимах на стенках цилиндров образуется выработка, она всего несколько сотых миллиметра глубиной, но этого вполне достаточно, чтобы при переходе на высокие обороты износ поршневых колец увеличивается, возникает вероятность повреждения и разрушения колец.
На этих оборотах автомобилю придается наибольшее ускорение, а двигатель испытывает колоссальные нагрузки, и именно в этот момент мотор приработавшийся к 2000 оборотов может подвести. При работе двигателя шатуны двигателя, под действием инерции поршня немного вытягиваются, чем больше обороты, тем деформация сильнее (шатун длиннее). При длительной работе в щадящих режимах на стенках цилиндров образуется выработка, она всего несколько сотых миллиметра глубиной, но этого вполне достаточно, чтобы при переходе на высокие обороты увеличить износ поршневых колец, а возможно и повредить их или вовсе сломать.
Как определить частоту вращения электродвигателя?
Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации. Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке — шильдике, прикрепленной к его корпусу
И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке
Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке — шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.
Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми — стершимися надписями на нем.
Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.
Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора — большая редкость, данный метод здесь не рассматривается.
Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.
Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.
Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.
Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей — несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 обмин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:
Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 обмин, ⅓ — 1500 об/мин, ¼ — 1000 об/мин.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
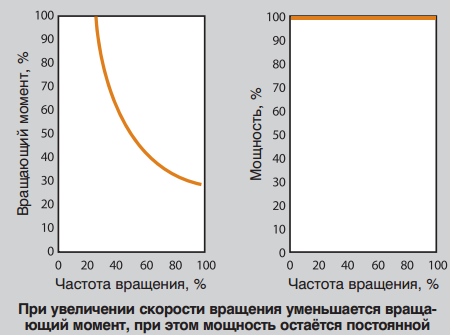
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
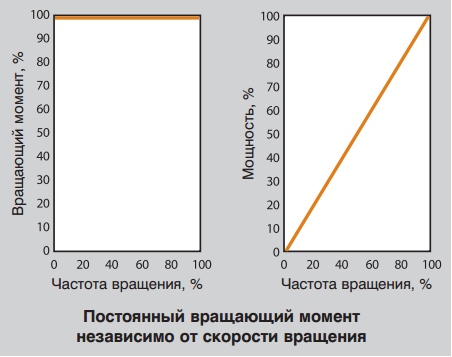
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
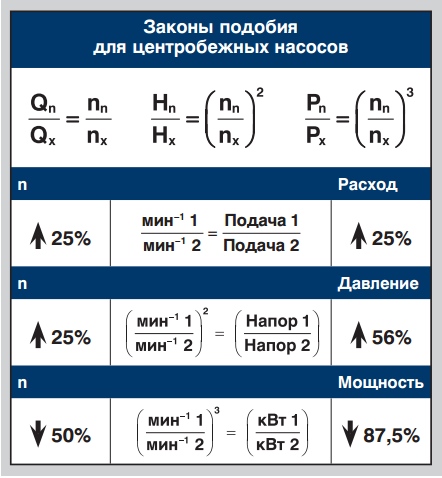
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
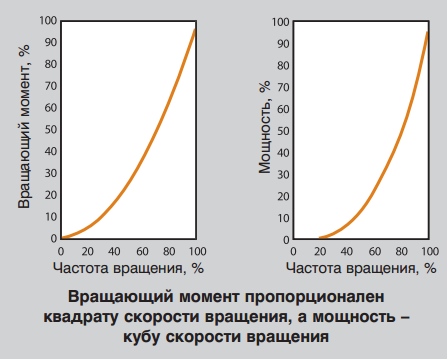
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
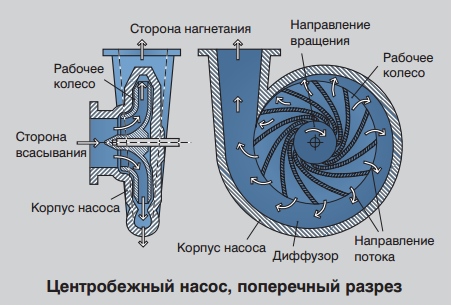
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
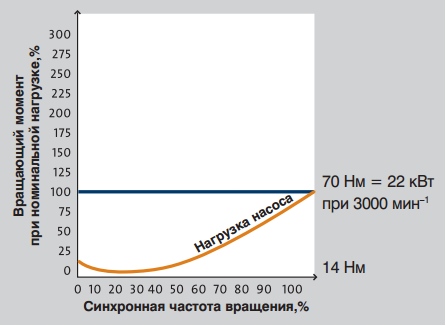
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Измерение тока
В отличие от нагревателя или лампы накаливания, ток, потребляемый электродвигателем, зависит от нагрузки. Измерение тока холостого хода, не даст достоверной информации о его мощности. В случае, когда двигатель установлен в оборудовании (насос, вентилятор), можно считать что нагрузка соответствует номиналу. В этом случае измерив ток, высчитывается активная мощность, по формуле Ра = Iср*Uср*1,73*cosf*КПД. Учитывая, что нам неизвестна процентная нагрузка на электромотор, для приблизительных расчетов можно использовать старое правило — 2 А на киловатт в трехфазной сети 380 В, и 4,5 А в сети 220 В.
§ 108. Вращающий момент асинхронного двигателя
Принцип действия асинхронного двигателя, как указывалось, основан на взаимодействии вращающегося поля и тока, индуктированного этим полем в обмотке ротора. В результате взаимодействия магнитного потока Φ с током I2, протекающим в проводниках обмотки ротора, возникают электромагнитные силы, приводящие ротор во вращение.
Поэтому вращающий момент, создаваемый на валу двигателя, зависит от величины тока ротора I2 и от магнитного потока Φ.
Кроме того, на величину вращающего момента асинхронного двигателя влияет сдвиг фаз Ψ2 между током I2 и э.д.с. ротора. Для уяснения влияния cos Ψ2 рассмотрим картину электромагнитных сил, действующих на проводники ротора.
Рассмотрим сначала случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз между током и э.д.с. можно пренебречь (рис. 255, а). Вращающееся магнитное поле статора здесь заменено полем полюсов N и S, вращающимся, предположим, по направлению часовой стрелки. Пользуясь правилом «правой руки», определяем направление э.д.с. и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся магнитным полем, создают момент вращения. Направления сил, действующих на проводники с током, определяются по правилу «левой руки». Как видно из чертежа, ротор под действием электромагнитных сил будет вращаться в ту же сторону, что и само вращающееся поле, т. е. по часовой стрелке.
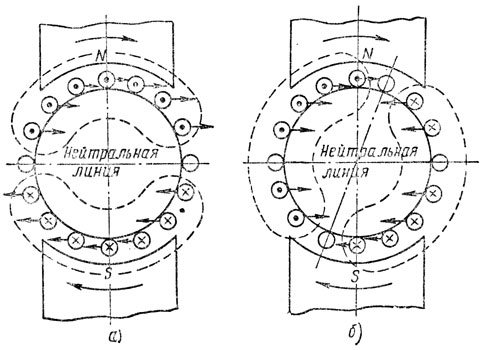
Рис. 255. Электромагнитные силы, действующие на проводники ротора: а — при отсутствии индуктивности, б — при наличии индуктивности
Рассмотрим второй случай, когда индуктивность обмотки ротора относительно велика. В этом случае сдвиг фаз между током ротора I2 и э.д.с. ротора будет также значительным. На рис. 255, б магнитное поле статора асинхронного двигателя по-прежнему показано в виде вращающихся по направлению часовой стрелки полюсов N и S. Направление индуктированной в обмотке ротора э.д.с. остается таким же, как и на рис. 255, а, но вследствие запаздывания тока по фазе максимум тока I2 наступает позднее, чем максимум э.д.с.
На рис. 255 показано направление индуктированных токов в отдельных проводниках ротора в рассматриваемый момент времени, а также направления отдельных электромагнитных сил, действующих на проводники. Если Ψ2 = 0, то все электромагнитные силы будут действовать согласованно. При большем Ψ2 часть электромагнитных сил создают вращающий момент, направленный по часовой стрелке, а остальные силы — против часовой стрелки.
Магнитный поток Φ не зависит от скорости вращения ротора n. Следовательно, вращающий момент М пропорционален только активной составляющей тока ротора I2 cos Ψ2. Индуктивное сопротивление ротора Х2 = 2πfL2, а следовательно, и величина cos Ψ2 зависят от частоты тока ротора f2 и поэтому с изменением нагрузки на валу ротора изменяется не только величина тока I2, но и величина cos Ψ2. Таким образом, изменение вращающего момента, развиваемого двигателем, с изменением скорости вращения (и скольжения) определяется одновременно как изменением тока I2, так и изменением cos Ψ2.
На основании математического анализа и экспериментального исследования можно построить график зависимости вращающего момента асинхронного двигателя М от скольжения S (рис. 256). Так как каждому значению S соответствует определенное значение n = n (1 — S), то указанный график можно представить и как зависимость вращающего момента от скорости n. Зависимость между вращающим моментом М и скольжением S называется механической характеристикой двигателя (рис. 256).
Рис. 256. Механические характеристики асинхронного двигателя
На кривой А видно, что в начальный момент пуска, когда S = 1 и n = 0, вращающий пусковой момент двигателя относительно невелик. Это объясняется тем, что в момент пуска частота тока в обмотке ротора наибольшая и индуктивное сопротивление обмотки велико. Вследствие этого cos Ψ2 имеет малое значение (около 0,1-0,2). Поэтому, несмотря на большую величину пускового тока, пусковой вращающий момент будет наибольшим. По мере разгона двигателя скольжение уменьшается.
При некотором скольжении S1, называемом критическим, вращающий момент двигателя будет иметь максимальное значение. При дальнейшем уменьшении скольжения (или, иначе говоря, при дальнейшем увеличении скорости вращения двигателя) вращающий момент будет быстро уменьшаться и при скольжении S = 0 момент двигателя будет равен нулю. Этот режим соответствует идеальному холостому ходу, когда двигатель не нагружен, а механическими потерями (на трение) можно пренебречь.
Управление асинхронным двигателем
- Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Реверсивная схема
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
- Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
- В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.
Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
- По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).
Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
Подписка на рассылку
Порядка 70 % потребляемой промышленностью мощности, приходится на электропривод. Огромное разнообразие технологических процессов диктует свои правила, вследствие чего, появилась необходимость в изменении скорости вращения электродвигателя непосредственно во время технологического процесса. В данной статье мы раскроем различные способы регулирования скорости вращения электродвигателей.
Параметры, изменив которые, мы изменим скорость двигателя переменного тока (ДПТ):
Изменяемые параметры для ДПТ:
Частотное регулирование
Наиболее эффективный, постоянно совершенствующийся способ. Применение: двигатели переменного тока (синхронные и асинхронные с кз ротором). Корректируя частоту питающего напряжения, мы изменим угловую скорость магнитного поля статора, следовательно, скорость двигателя в значительном диапазоне, имея достаточно жесткие механические характеристики. Для сохранения в норме коэффициента мощности и допустимости кратковременных перегрузок, меняя частоту, следует изменять и саму величину питающего напряжения.
Преимущества способа:
Регулирование изменением числа пар полюсов
Применение: т.к. промышленность не выпускает серийно синхронные двигатели с изменяемым количеством пар полюсов, будем считать, что способ актуален только для асинхронных двигателей (далее АД) с кз ротором. Способ реализуется изменением числа пар полюсов у обмоток. Этого можно добиться, изготовив двигатель с двумя независимыми обмотками. Но этот метод приводит к удорожанию конструкции и увеличению размеров машины. Поэтому наиболее выгодным является увеличение числа пар полюсов без использования второй независимой обмотки. Промышленностью выпускаются двухскоротсные, трёхскоростные и четырёхскоростные электродвигатели.
Достоинства:
Недостатки:
Добавочное сопротивление в цепи ротора
Применение: АД с фазным ротором. При изменении сопротивления ротора прямо пропорционально изменяется скольжение. Но величина критического момента остается постоянной. Это позволяет подобрать сопротивления так, чтобы уравнять критический момент с пусковым, что благоприятно сказывается на пуске двигателя под нагрузкой.
Достоинства способа:
Недостатки:
Асинхронный вентильный каскад
Применение: АД с фазным ротором.
Достоинства:
Недостатки:
Изменение напряжения питания якоря
Применение: любые ДПТ. Способ можно использовать если источником электрической энергии является генератор. Реализовать от общей сети невозможно.
Достоинства:
Недостатки:
Введение добавочного резистора в цепь якоря
Применение: любые ДПТ.
Заключается в последовательном включении в цепь якоря регулировочного реостата. Но способ не получил распространения ввиду своей неэкономичности и плохого влияния на КПД двигателя, т.к. в цепи реостата теряется очень большое количество энергии.
Регулирование изменением магнитного потока
В цепь возбуждения двигателей параллельного и смешанного возбуждения подключается реостат. В машинах последовательного возбуждения изменение магнитного потока в обмотке возбуждения производится шунтированием этой обмотки регулируемым сопротивлением. Максимальная скорость вращения двигателя ограничивается лишь механической прочностью якоря. Скорость двигателя регулируется в диапазонах 2:1-5:1, в частных случаях 8-10:1.
Подключение двигателя прямого пуска, выбор всех компонентов
Практически в каждом объекте присутствуют двигатели, которые необходимо подключить. Основную массу электродвигательного оборудования составляют вентиляторы и насосы
Я думаю вы обратили внимание, что у меня в шапке блога показано как раз такое подключение. В этой заметке мы произведем подключение электрического двигателя
1 Рассчитываем потребляемый ток двигателя.
Потребляемый ток зависит от мощности, напряжения, коэффициента мощности и коэффициента полезного действия. В некоторых каталогах, например насосы Wilo, кроме мощности в характеристиках можно найти и потребляемый ток.
https://youtube.com/watch?v=PZDikNp_9-c
Для расчета тока двигателя можно воспользоваться моей программкой. Там все очень просто. Подставляем данные и получаем расчетный ток двигателя. Скачать мою программу для расчета тока двигателя можно по .
2 Определяем каким образом у нас будет включаться двигатель.
Как правило, для управления двигателем используют электромагнитный пускатель. Электромагнитный пускатель позволяет управлять двигателем при необходимости с двух и более мест. Например, общая вентсистема на два этажа.
Для этого можно поставить пост кнопочного управления (с кнопками ПУСК и СТОП) на каждом этаже, а пускатель разместить в силовом щите. Еще пускатель защищает двигатель от перегрузки.
Дополнительные контакты электромагнитного пускателя позволяют сигнализировать о включении или отключении двигателя. Как выбрать электромагнитный пускатель, я посвящу отдельный пост.
Если не требуется предусматривать дистанционное управление и двигатель малой мощности (вентиляторы до 0,3кВт), то можно по месту поставить обычный выключатель освещения или выключатель кнопочный (ВКИ, ПРК).
3 Выбираем кабель от двигателя до пускового аппарата (пускателя, контактора).
Если двигатель однофазный, то кабель будет трехжильный (1Р+N+PE), если трехфазный — четырехжильный(3Р+PE). До 16мм2 кабель может быть медным, от 16 мм2- алюминиевый. По согласованию с заказчиком кабели от 16мм2 можно также взять медными. Основное условие: допустимый длительный тока кабеля должен быть больше потребляемого тока двигателя.
4 Выбираем кабель от защитного аппарата до пускового аппарата (пускателя, контактора).
В случае с однофазным двигателем — трехжильный (1Р+N+PE). При трехфазном двигателе возможно 2 варианта, все зависит от напряжения катушки пускателя. Я применяю пускатели с катушками на 230В, поэтому кабель — пятижильный(3Р+N+PE). Если вы выбрали пускатель с катушкой на 400В, то кабель в вашем случае будет четырехжильный(3Р+PE).
5 Выбираем защитный аппарат.
Совет
Здесь для нас важны две характеристики: ток теплового расцепителя и характеристика электромагнитного расцепителя. От перегрузки двигатель наш будет защищать тепловое реле электромагнитного пускателя. Основное назначение автоматического выключателя – защита кабеля от перегрузки и короткого замыкания. Не стоит завышать уставку автоматического выключателя!
Уставка теплового расцепителя автоматического выключателя выбирается примерно на 10-20% выше, чем потребляемый ток двигателя. Приведу пример, пусть ток двигателя 40А. Подходит кабель 6мм2, но автомат должен быть на 50А. Как видим автомат не защитит наш кабель, поэтому сечение кабеля будет увеличено до 10мм2.
Характеристика электромагнитного расцепителя зависит от пускового тока двигателя. При не правильном выборе автомат будет срабатывать при пуске двигателя.
В случае, как у меня на картинке сверху, расчетный ток 10,8А, пусковой ток равен 10,8*7,5=81А. Автоматический выключатель выбран мною 16D, т.к. 16С может сработать при пуске двигателя (81/16=5,1).
Похожие записи:
 Программируемый логический контроллер и его применение
Программируемый логический контроллер и его применение
 Что такое слаботочный щиток и зачем он нужен в квартире?
Что такое слаботочный щиток и зачем он нужен в квартире?
 Favourite
Favourite
 Подборка лучших супер-магнитов, поисковых магнитов и редкоземельных магнитов с aliexpress
Подборка лучших супер-магнитов, поисковых магнитов и редкоземельных магнитов с aliexpress
 Один ампер сколько миллиампер
Один ампер сколько миллиампер
 Основные характеристики тон генераторов для прозвонки кабелей
Основные характеристики тон генераторов для прозвонки кабелей