Реализация ШИМ
Многие модели современных ПЛК контроллеров предоставляют возможность организации ШИМ. Но иногда доступных каналов оказывается недостаточно и приходится использовать программу обработки прерывай.
Алгоритм реализации ШИМ:
- В начале каждого импульса ставим единицу и ждем повышения значения до заданного уровня.
- Сбрасываем линию на ноль.
Советуем изучить — Статическое и астатическое регулирование
Длительность импульса легче отследить с определенной периодичностью или ступенями. Например, десять регулировочных ступеней соответствуют 10% от максимального значения. Прежде всего необходимо определиться с частотой импульсов и количеств ступеней регулирования. Далее, умножают полученные значения. Результат произведения даст необходимую частоту прерываний таймера.
При желании можно выбрать подходящую частоту таймера или количество ступеней регулирования и путем расчетов находят необходимую частоту импульсов.
Так же по теме регулирования скорости коллекторного двигателя предлагаем статью «Управление коллекторным двигателем постоянного тока методом ШИМ»
Проверка электродвигателя с фазным ротором
Как известно, электродвигатели с фазным ротором имеют обмотки как на статоре, так и на роторе, что повышает вероятность выхода из строя именно одной из них. Для проверки обмоток статора трехфазного АД на целостность, необходимо добраться до клемм их подключения. Затем нужно произвести замеры сопротивлений между фазными клеммами по отдельности, предварительно сняв перемычки. Если сопротивление какой-либо обмотки меньше, чем у других, это свидетельствует о замыкании между ее витками. В этом случае двигатель отдается на перемотку.
Для проверки обмоток ротора, необходимо отыскать выводы от контактных колец. Затем нужно убедиться, что сопротивления обмоток совпадают. Если конструкция электродвигателя предусматривает наличие системы отключения обмоток ротора, отсутствие контакта может быть обусловлено именно поломкой данного механизма, а не обрывом витков.
О наличие какой-либо неисправности АД могут свидетельствовать следующие факторы:
- Снижение скорости вращения при нагрузке. Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети
- Разворачивание АД, когда цепь ротора разомкнута – КЗ в обмотке ротора
- Чрезмерное равномерное повышение температуры двигателя – длительная перегрузка АД или его недостаточное охлаждение
- Нагрев статорной обмотки местного характера – двойное замыкание катушек статора на корпус или между фазами, КЗ между витками, неверное подключение катушек в фазе между собой
- Нагрев стали статора местного характера – нарушение изоляции между листами стали, их оплавление и выгорание, замыкание
- Посторонний шум при работе АД. Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шума
- Перегорание в обмотке якоря предохранителей, отсутствие контакта в подводящей проводке, выход из строя реостата
Для самостоятельной диагностики и исправления неисправностей электродвигателя необходимыми являются хотя-бы минимальные познания в устройстве АД и электрических цепях в целом. Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
https://youtube.com/watch?v=yLHAaZTr0hQ
Источник
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
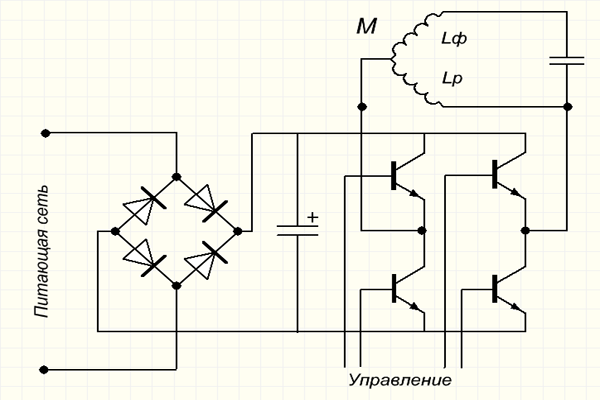
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
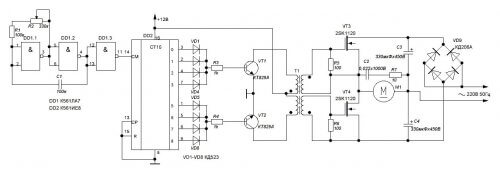
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2×12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.

Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.

Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Внедрение автоматических систем управления
Наличие в регуляторах и частотных преобразователях микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может работать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет показатели частоты вращения агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют отличающееся число выходов и входов. К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
 В продаже можно найти различные типы микроконтроллеров, которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
В продаже можно найти различные типы микроконтроллеров, которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
Сегодня в продаже имеются различные преобразователи и регуляторы электродвигателя. Впрочем, при наличии даже минимальных навыков работы с радиодеталями и умении читать схемы можно выполнить такое простейшее устройство, которое будет плавно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что позволит плавно изменять обороты, а наличие микроконтроллерного управления полностью автоматизирует использование электрических двигателей.
https://youtube.com/watch?v=Dk6kZbvZd-Q
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
https://youtube.com/watch?v=N8fTC5IOVFY
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
https://youtube.com/watch?v=EYkb8_6F-Sw
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
https://youtube.com/watch?v=ZYYFLX6PxBg
Подписка на рассылку
Порядка 70 % потребляемой промышленностью мощности, приходится на электропривод. Огромное разнообразие технологических процессов диктует свои правила, вследствие чего, появилась необходимость в изменении скорости вращения электродвигателя непосредственно во время технологического процесса. В данной статье мы раскроем различные способы регулирования скорости вращения электродвигателей.
Параметры, изменив которые, мы изменим скорость двигателя переменного тока (ДПТ):
Изменяемые параметры для ДПТ:
Частотное регулирование
Наиболее эффективный, постоянно совершенствующийся способ. Применение: двигатели переменного тока (синхронные и асинхронные с кз ротором). Корректируя частоту питающего напряжения, мы изменим угловую скорость магнитного поля статора, следовательно, скорость двигателя в значительном диапазоне, имея достаточно жесткие механические характеристики. Для сохранения в норме коэффициента мощности и допустимости кратковременных перегрузок, меняя частоту, следует изменять и саму величину питающего напряжения.
Преимущества способа:
Регулирование изменением числа пар полюсов
Применение: т.к. промышленность не выпускает серийно синхронные двигатели с изменяемым количеством пар полюсов, будем считать, что способ актуален только для асинхронных двигателей (далее АД) с кз ротором. Способ реализуется изменением числа пар полюсов у обмоток. Этого можно добиться, изготовив двигатель с двумя независимыми обмотками. Но этот метод приводит к удорожанию конструкции и увеличению размеров машины. Поэтому наиболее выгодным является увеличение числа пар полюсов без использования второй независимой обмотки. Промышленностью выпускаются двухскоротсные, трёхскоростные и четырёхскоростные электродвигатели.
Достоинства:
Недостатки:
Добавочное сопротивление в цепи ротора
Применение: АД с фазным ротором. При изменении сопротивления ротора прямо пропорционально изменяется скольжение. Но величина критического момента остается постоянной. Это позволяет подобрать сопротивления так, чтобы уравнять критический момент с пусковым, что благоприятно сказывается на пуске двигателя под нагрузкой.
Достоинства способа:
Недостатки:
Асинхронный вентильный каскад
Применение: АД с фазным ротором.
Достоинства:
Недостатки:
Изменение напряжения питания якоря
Применение: любые ДПТ. Способ можно использовать если источником электрической энергии является генератор. Реализовать от общей сети невозможно.
Достоинства:
Недостатки:
Введение добавочного резистора в цепь якоря
Применение: любые ДПТ.
Заключается в последовательном включении в цепь якоря регулировочного реостата. Но способ не получил распространения ввиду своей неэкономичности и плохого влияния на КПД двигателя, т.к. в цепи реостата теряется очень большое количество энергии.
Регулирование изменением магнитного потока
В цепь возбуждения двигателей параллельного и смешанного возбуждения подключается реостат. В машинах последовательного возбуждения изменение магнитного потока в обмотке возбуждения производится шунтированием этой обмотки регулируемым сопротивлением. Максимальная скорость вращения двигателя ограничивается лишь механической прочностью якоря. Скорость двигателя регулируется в диапазонах 2:1-5:1, в частных случаях 8-10:1.
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
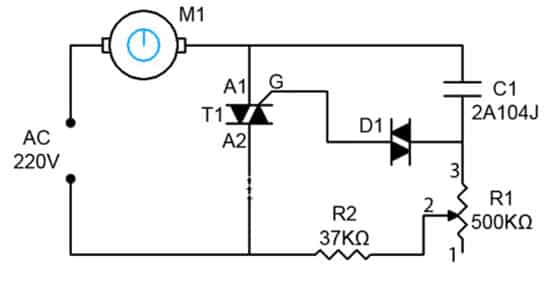
Фото — схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Регулирование напряжением
n2— скорость вращения ротора
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы: Недостатки:
Тиристорный регулятор оборотов двигателя
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
Достоинства тиристорных регуляторов:
Недостатки:
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Плюсы электронного автотрансформатора:
Слабые стороны:
Cпособы регулирования скорости вращения асинхронного двигателя
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена
При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
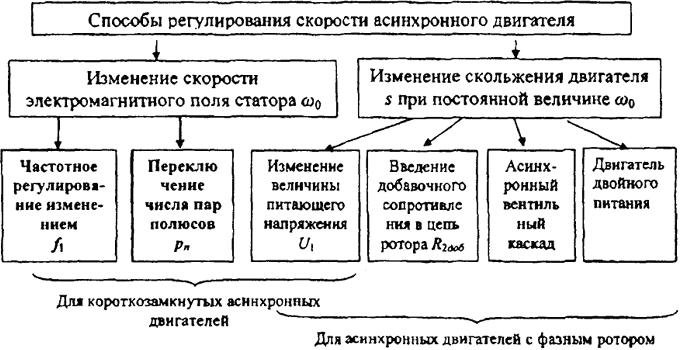
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Эпилог
При всех своих достоинствах асинхронные машины имеют существенный недостаток, это рывок ротора при подаче напряжения. Такие режимы опасны как для самого двигателя, так и для приводных механизмов. Поскольку во время пуска АД, ток в обмотках двигателя приравнивается к короткому замыканию. А рывок вала разбивает подшипники, шлицы, передаточные устройства. Поэтому пуск АД стараются производить плавным стартом. А именно:
- Запуск через ЛАТР.
- Разгон и работа АД, через переключение обмоток двигателя звезда-треугольник.
- Использование устройств управления, таких как частотный преобразователь.
Регулирование частотой
Специальные устройства, преобразователи частоты (другие названия инвертор, частотник, драйвер), подключаются к электрической машине. Путем выпрямления напряжения питания, преобразователь частоты внутри себя формирует необходимые величины частоты и напряжения, и подает их на электрический двигатель.
Необходимые параметры для управления АД преобразователь рассчитывает самостоятельно, согласно внутренним алгоритмам, запрограммированным производителем устройства.
Преимущества регулирование частотой
- Достигается плавное регулирование частоты вращения электромотора.
- Изменение скорости и направление вращения двигателя.
- Автоматическое поддержание требуемых параметров.
- Экономичность системы управления.
Единственный недостаток, с которым можно смирится, это необходимость в приобретении частотника. Цены на такие устройства совсем незаоблачные, и в пределах 150 уе, можно обзавестись преобразователем для 2 кВт двигателя.
Простой самодельный регулятор
Если вы не хотите покупать готовый регулятор оборотов для двигателя, его вполне можно попробовать изготовить своими руками для контроля мощности устройства.
Это дополнительные навыки для вас и определенная экономия средств для кошелька.
https://youtube.com/watch?v=KPQDkciC2U8
Для изготовления регулятора вам потребуется:
- Набор проводков;
- Паяльник;
- Схема;
- Конденсаторы;
- Резисторы;
- Тиристор.
Монтажная схема будет выглядеть следующим образом.
Согласно представленной схеме, регулятор мощности и оборотов будет контролировать 1 полупериод. Расшифровывается она следующим образом.
- Питание от стандартной сети 220в поступает на конденсатор. 220 Вольт — стандартный показатель бытовых розеток.
- Конденсатор, получив заряд, вступает в работу.
- Нагрузка переходит к нижнему кабелю и резисторам.
- Положительный контакт конденсатора соединяется с электродом тиристора.
- Идет один достаточный заряд напряжения.
- Второй полупроводник при этом открывается.
- Тиристор через себя пропускает полученную от конденсатора нагрузку.
- Происходит разряжение конденсатора, и полупериод вновь повторяется.
При большой мощности электродвигателя, питающегося от постоянного или переменного тока, регулятор дает возможность применять агрегат более экономично.
Самодельные регуляторы оборотов имеют полное право на свое существование. Но когда речь заходит о необходимости использовать регулятор электродвигателя для более серьезного оборудования, рекомендуется купить готовое устройство. Пусть оно обойдется дороже, но вы будете уверены в работоспособности и надежности агрегата.
При использовании электродвигателя в инструментах, одной из серьёзных проблем является регулировка скорости их вращения. Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.
Если же она излишне высока, то это приводит не только к существенному перерасходу электрической энергии, но и к возможному пережогу инструмента. При слишком высокой скорости вращения, работа инструмента может стать также менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости вращения.
Двигатель для электроинструментов и бытовой техники обычно относится к одному из 2 основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом, вторая из указанных категорий имела наибольшее распространение. Сейчас, примерно 85% двигателей, которые употребляются в электрических инструментах, бытовой или кухонной технике, относятся к коллекторному типу. Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Действие любого электродвигателя построено на очень простом принципе: если между полюсами магнита поместить прямоугольную рамку, которая может вращаться вокруг своей оси, и пустить по ней постоянный ток, то рамка станет поворачиваться. Направление вращения определяется согласно «правилу правой руки».
Эту закономерность можно использовать для работы коллекторного двигателя.
Важным моментом здесь является подключение тока к этой рамке. Поскольку она вращается, для этого используются специальные скользящие контакты. После того, как рамка повернётся на 180 градусов, ток по этим контактам потечёт в обратном направлении. Таким образом, направление вращения останется прежним. При этом, плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков рамок.
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ: возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Похожие записи:
 Как правильно вешать люстру на крюк или кронштейн самостоятельно
Как правильно вешать люстру на крюк или кронштейн самостоятельно
 Mysql workbench, учебное пособие: полное руководство по инструменту субд
Mysql workbench, учебное пособие: полное руководство по инструменту субд
 Какие бывают кабеля для зарядки, чем отличаются
Какие бывают кабеля для зарядки, чем отличаются
 Провод мгшв
Провод мгшв
 Электрика до штукатурки или после 7 нет и 3 да
Электрика до штукатурки или после 7 нет и 3 да
 Gx53 светильник для натяжных потолков и что нужно о нем знать
Gx53 светильник для натяжных потолков и что нужно о нем знать