Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
- Электродвигатели постоянного токаИспользуются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
- Электродвигатели переменного токаПользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
- Шаговые электродвигателиДействуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
- СерводвигателиОтносятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
- Линейные электродвигателиОбладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
- Синхронные двигателиЯвляются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
- Асинхронные двигателиТакже, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
Основные схемы подключения
В качестве фазозамещающего элемента для подключения однофазного асинхронного двигателя можно использовать разные электромеханические элементы (катушка индуктивности, активный резистор и др.), однако конденсатор обеспечивает наилучший пусковой эффект, благодаря чему и применяется для этого чаще всего.
 однофазный асинхронный двигатель и конденсатор
однофазный асинхронный двигатель и конденсатор
Различают три основные способа запуска однофазного асинхронного двигателя через:
- рабочий;
- пусковой;
- рабочий и пусковой конденсатор.
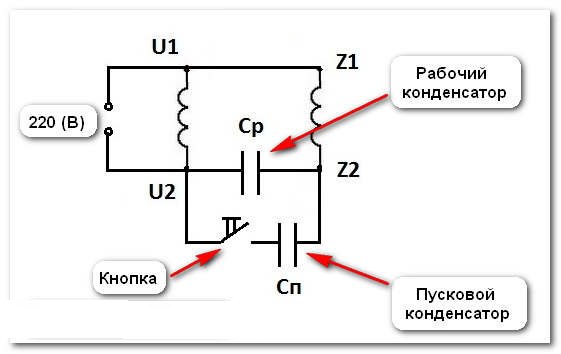
В большинстве случаев применяется схема с пусковым конденсатором. Это связано с тем, что она используется как пускатель и работает только во время включения двигателя. Дальнейшее вращение ротора обеспечивается за счет пульсирующего магнитного поля рабочей фазы, как уже было описано в предыдущем абзаце. Для замыкания цепи пусковой цепи зачастую используют реле или кнопку.
Поскольку обмотка пусковой фазы используется кратковременно, она не рассчитана на большие нагрузки, и изготавливается из более тонкой проволоки. Для предотвращения выхода её из строя в конструкцию двигателей включают термореле (размыкает цепь после нагрева до установленной температуры) или центробежный выключатель (отключает пусковую обмотку после разгона вала двигателя).
Таким путем достигаются отличные пусковые характеристики. Однако данная схема обладает одним существенным недостатком – магнитное поле внутри двигателя, подключенного к однофазной сети, имеет не круговую, а эллиптическую форму. Это увеличивает потери при преобразовании электрической энергии в механическую и, как следствие, снижает КПД.
Схема с рабочим конденсатором не предусматривает отключение дополнительной обмотки после запуска и разгона двигателя. В данном случае конденсатор позволяет компенсировать потери энергии, что приводит к закономерному увеличению КПД. Однако в пользу эффективности проходится жертвовать пусковыми характеристиками.
Для работы схемы необходимо подбирать элемент с определенной ёмкостью, рассчитанной с учетом тока нагрузки. Неподходящий по емкости конденсатор приведет к тому, что вращающееся магнитное поле будет принимать эллиптическую форму.
Своеобразной «золотой серединой» является схема подключения с использованием обоих конденсаторов – и пускового, и рабочего. При подключении двигателя таким способом его пусковые и рабочие характеристики принимают средние значения относительно описанных выше схем.
На практике для приборов, требующих создания сильного пускового момента используется первая схема с соответствующим конденсатором, а в обратной ситуации – вторая, с рабочим.
https://youtube.com/watch?v=W7OczoKfnVk
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.
Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2. а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Недостатки асинхронных двигателей
Есть у электродвигателей такой конструкции и свои недостатки. К ним можно отнести потери на тепло. Они, действительно, могут перегреваться, особенно – под нагрузкой. Для этого их корпуса нередко делают ребристыми – чтобы они лучше излучали тепло в окружающее пространство. Также асинхронный прибор часто снабжается сидящим на том же валу вентилятором для обдува ротора, потому что корпус может отводить тепло только от статора, так как воздушного зазора между ними нет, чего не скажешь о роторе.
Невозможность стабильно держать частоту вращения делает асинхронный двигатель неприменимым в некоторых устройствах.
Подключение
Для работы устройства требуется 1 фаза с напряжением 220 Вольт. Это означает, что подключить его можно в бытовую розетку. Именно в этом причина популярности двигателя среди населения. На всех бытовых приборах, от соковыжималки до шлифовальной машины, установлены механизмы этого типа.
аподключение с пусковым и рабочим кондсенсаторами
Существует 2 типа электромоторов: с пусковой обмоткой и с рабочим конденсатором:
- В первом типе устройств. пусковая обмотка работает посредством конденсатора только во время старта. После достижения машиной нормальной скорости, она отключается, и работа продолжается с одной обмоткой.
- Во втором случае. для моторов с рабочим конденсатором, дополнительная обмотка подключена через конденсатор постоянно.
Электродвигатель может быть взят от одного прибора и подключен к другому. Например, исправный однофазный мотор от стиральной машины или пылесоса может использоваться для работы газонокосилки, обрабатывающего станка и т.п.
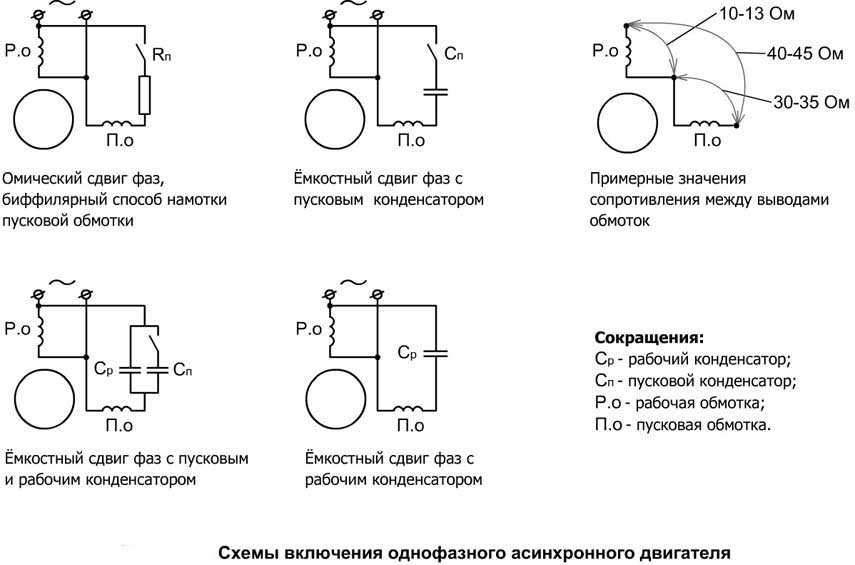
Существует 3 схемы включения однофазного двигателя:
- В 1 схеме. работа пусковой обмотки выполняется посредством конденсатора и только на период запуска.
- 2 схема также предусматривает кратковременное подключение, однако оно происходит через сопротивление, а не через конденсатор.
- 3 схема является самой распространенной. В рамках этой схемы конденсатор постоянно подключен к источнику электричества, а не только во время старта.
Подключение электромотора с пусковым сопротивлением:
- Вспомогательная обмотка таких устройств имеет повышенное активное сопротивление.
- Для запуска электромашины этого типа, может быть использован пусковой резистор. Его следует последовательно подключить к пусковой обмотке. Таким образом, можно получить сдвиг фаз 30° между токами обмоток, чего будет вполне достаточно для старта механизма.
- Кроме того. сдвиг фаз может быть получен путем использования пусковой фазы с большим значением сопротивления и меньшей индуктивностью. У такой обмотки меньшее количество витков и тоньше провод.
Подключение мотора с конденсаторным пуском:
- У данных электромашин пусковая цепь содержит конденсатор и включается только на период старта.
- Для достижения максимального значения пускового момента, требуется круговое магнитное поле, которое выполняет вращение. Чтобы оно возникло, токи обмоток должны быть повернуты на 90° относительно друг друга. Такие фазосдвигающие элементы, как резистор и дроссель не обеспечивают необходимый сдвиг фаз. Только включение в цепь конденсатора позволяет получить сдвиг фаз 90°, если правильно подобрать емкость.
- Вычислить. какие провода к какой обмотке относятся, можно путем измерения сопротивления. У рабочей обмотки его значение всегда меньше (около 12 Ом), чем у пусковой (обычно около 30 Ом). Соответственно, сечение провода рабочей обмотки больше, чем у пусковой.
- Конденсатор подбирается по потребляемому двигателем току. Например, если ток равен 1.4 А, то необходим конденсатор емкостью 6 мкФ.
Как подключить асинхронный двигатель на 220В
Так как питающие напряжения у различных потребителей могут различаться друг от друга, возникает необходимость переподключения электрооборудования. Сделать подключение асинхронного двигателя на 220 вольт безопасным для дальнейшей работы оборудования достаточно просто, если следовать предложенной инструкции.
На самом деле это не является невыполнимой задачей. Если сказать коротко, то все, что нам нужно, это правильно подключить обмотки. Существует два основных типа асинхронных двигателей: трехфазные с обмоткой звезда – треугольник, и двигатели с пусковой обмоткой (однофазные). Последние используются, например, в стиральных машинах советской конструкции. Их модель — АВЕ-071-4С. Рассмотрим каждый вариант по очереди.
- Трехфазный
- Переключение на нужное напряжение
- Увеличение напряжения
- Уменьшение напряжения
- Однофазный
Управление асинхронным двигателем
- Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
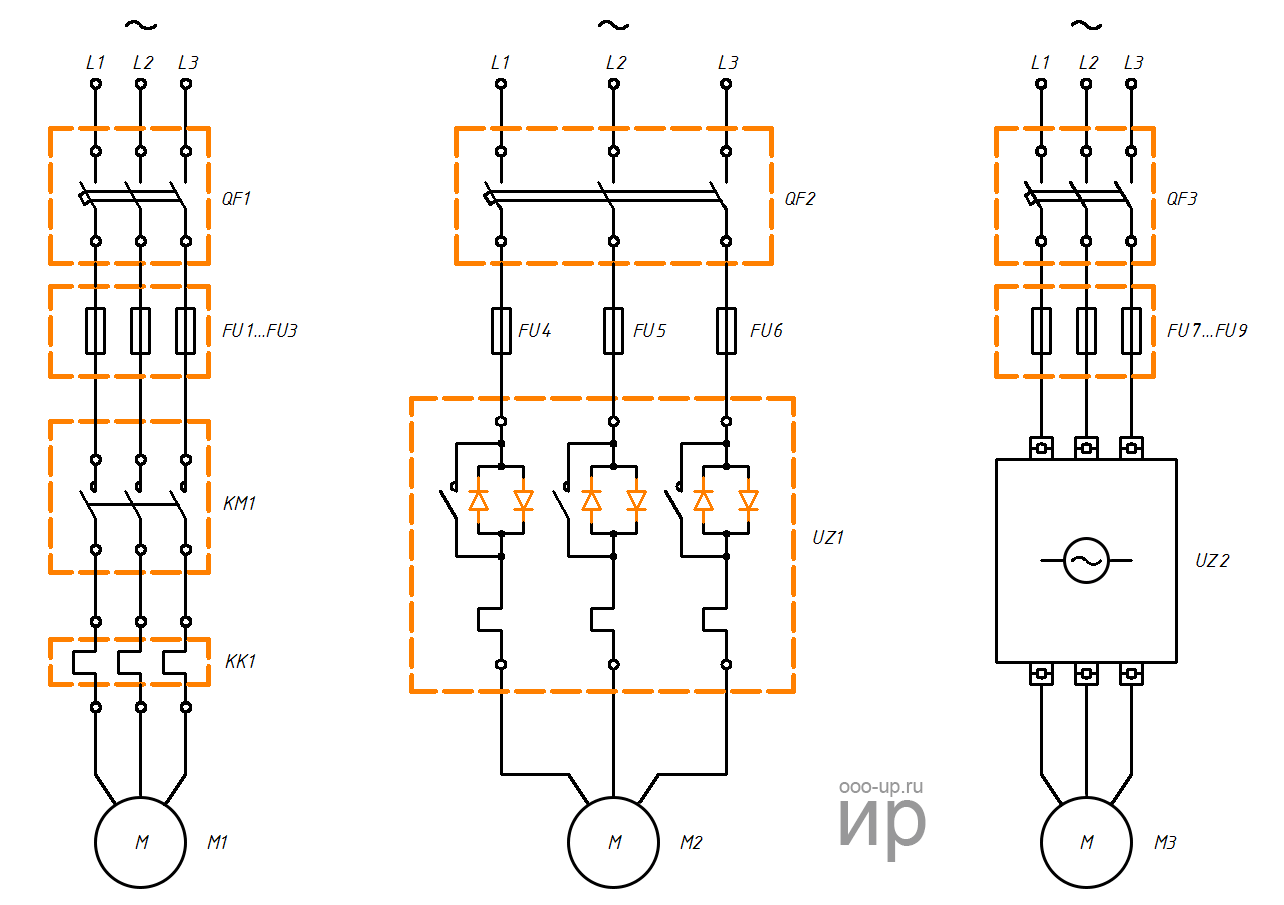
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Реверсивная схема
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
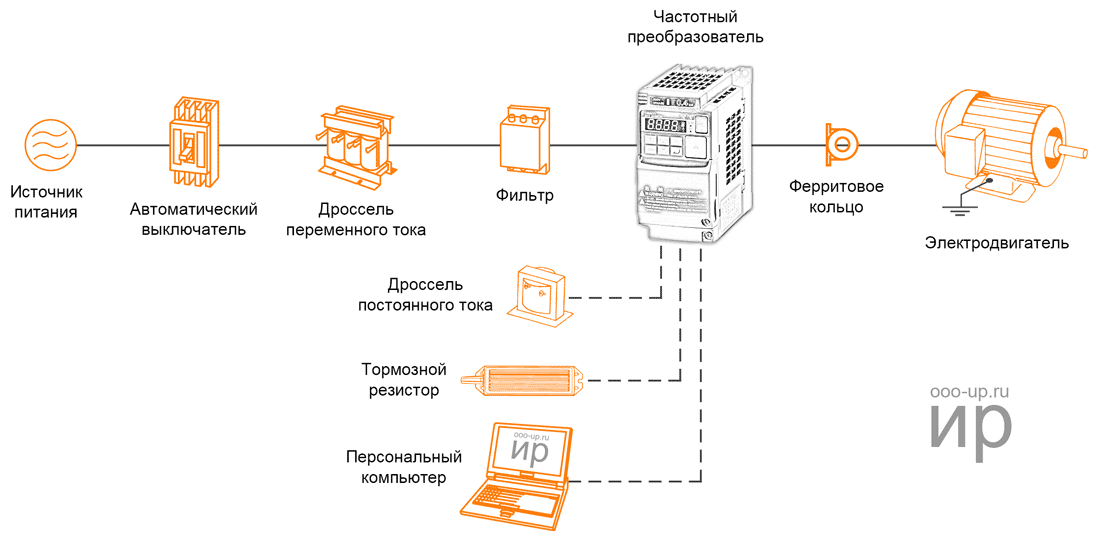
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
- Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
- В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
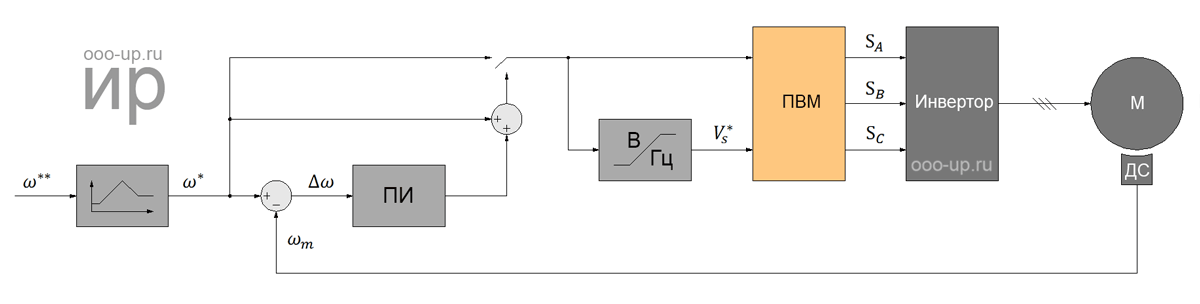
- скалярное управление;
- векторное управление.
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.
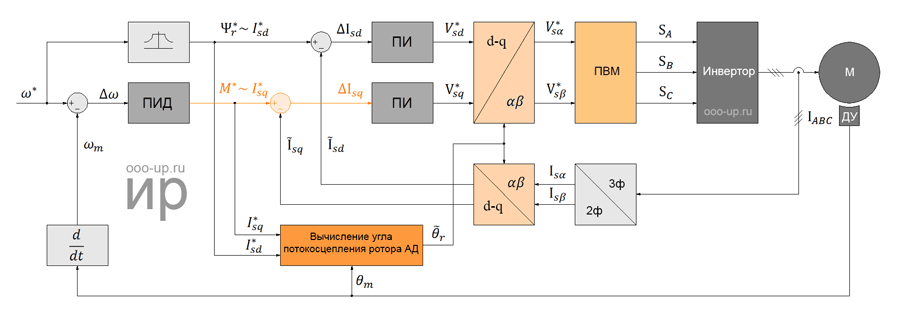
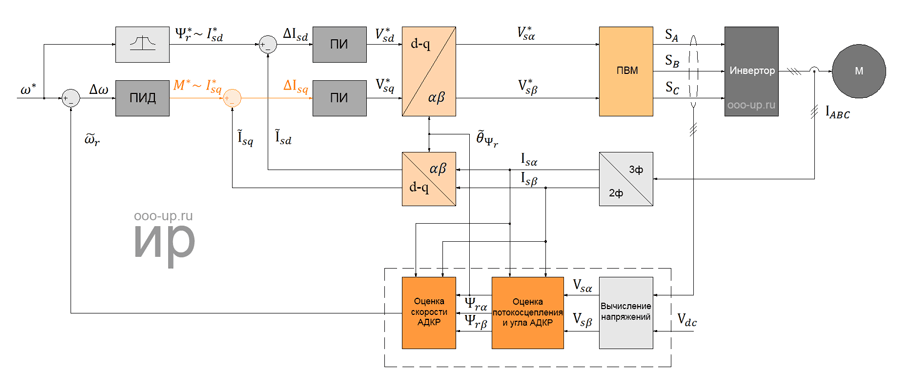
Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
- По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).
Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
Подключение однофазного синхронного электродвигателя
Несмотря на сложность конструкции синхронных двигателей, они имеют много преимуществ перед асинхронными. Главное – это низкая чувствительность к скачкам напряжения, ведущих к резкому уменьшению или увеличению силы тока. Не менее значим и тот факт, что синхронные моторы могут работать даже с перегрузкой, не говоря уже об оптимальном режиме реактивной энергии и вращении вала с постоянной скоростью. Однако подключение – трудоемкий процесс, и это уже недостаток.
Метод разгона
Нельзя пустить в ход однофазный синхронный двигатель, просто подав питание на его обмотки. Потому что в момент включения направление питающего тока в статорных намотках соответствует рисунку (а). В это время на ротор, который еще находится в состоянии покоя, действует пара сил, которая будет пытаться крутить вал по часовой стрелке. Но через половину периода в статорных намотках ток поменяет свое направление. Поэтому пара сил будет уже действовать в обратном направлении, поворачивая вал против часов стрелки, как на рисунке (б). Поскольку ротор обладает большой инертностью, он так и не сдвинется с места.
Чтобы заставить ротор вращаться, необходимо, чтобы он успевал сделать хотя бы половину оборота, чтобы изменение направления тока не повиляло на его вращение. Это возможно, если разогнать вал при помощи посторонних сил. Это можно сделать двумя путями:
- Вручную;
- С использованием второго двигателя.
Собственной силой рук можно разогнать только маломощные синхронные электродвигатели. А для средне- и высокомощных агрегатов придется использовать другой мотор.
При разгоне с посторонней силой ротор начинает вращаться со скоростью, близкой к синхронной. Потом только включается обмотка возбуждения, и затем – статорная намотка.
Асинхронный пуск синхронного мотора
Если в наконечниках на полюсах ротора уложены стержни из металла, и они соединены между собой по бокам кольцами, то мотор должен запускаться асинхронным методом. Эти стержни играют роль вспомогательной обмотки, которая есть у асинхронного двигателя. При этом намотку возбуждения закорачивают с помощью разрядного резистора, а статорную обмотку подключают к сети. Только так можно обеспечить такой же разгон, как и у асинхронного электродвигателя. Но после того, как скорость вращения максимально приблизится к синхронной (достаточно 95% от нее), намотку возбуждения соединяют с источником постоянного тока. Скорость становится полностью синхронной, что влечет за собой снижение ЭДС индукции вспомогательной обмотки вплоть до нуля. И она отключается автоматически.
Схема и способ подключения вашего двигателя будет зависеть от того, какой он у вас: синхронный или асинхронный. В учет идет также мощность мотора, а также способ пуска: с нагрузкой или без. Разобраться в рисунках вам поможет элементарное понимание механики и электромагнитных явлений.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин-1
Начальный пусковой момент – момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение – значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (), Вт
При этом
потери в электродвигатели обусловлены:
электрическими потерями – в виде тепла в результате нагрева проводников с током;
магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m – масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.