Физика
PRF имеет решающее значение для выполнения измерений определенных физических явлений.
Например, тахометр может использовать стробоскоп с регулируемой частотой повторения импульсов для измерения скорости вращения. PRF для стробоскопа регулируется в сторону увеличения от низкого значения до тех пор, пока вращающийся объект не будет казаться неподвижным. Тогда PRF тахометра будет соответствовать скорости вращающегося объекта.
Другие типы измерений включают расстояние с использованием времени задержки для отраженных эхо-импульсов от света, микроволн и передачи звука.
Коэффициент заполнения – прямоугольный импульс
[Коэффициент заполнения] = [Длительность импульса (L), с] / [Период следования импульсов (T), с]
|
Вашему вниманию подборки материалов: Конструирование источников питания и преобразователей напряжения Разработка источников питания и преобразователей напряжения. Типовые схемы. Примеры готовых устройств. Онлайн расчет. Возможность задать вопрос авторам Практика проектирования электронных схем Искусство разработки устройств. Элементная база. Типовые схемы. Примеры готовых устройств. Подробные описания. Онлайн расчет. Возможность задать вопрос авторам |
Таким образом коэффициент заполнения – величина безразмерная. Она получается делением секунд на секунды. Иногда удобно измерять коэффициент заполнения в процентах. Тогда нужно приведенное в определении отношение умножить на 100%.
Как мы видим, чем короче импульс, тем меньше коэффициент заполнения. Если длительность импульса стремится к нулю, то и коэффициент заполнения стремится к нулю.
Коэффициент — заполнение — пакет
Коэффициент заполнения пакета сталью k3 зависит, как известно, от рода изоляции и толщины листов стали. Для листов толщиной 0 5 и 0 35 мм k3 обычно принимается соответственно 0 95 и 0 9, если листы изолированы специальным лаком, и 0 9 и 0 85, если они изолированы путем оклейки бумагой.
Коэффициент заполнения пакета сталью при удельном давлении 105 Па ( 1 кг / см2) должен быть не менее 0 96 для стали толщиной 0 35 мм и 0 945 для стали толщиной 0 28 мм.
Кс — коэффициент заполнения пакета сердечника, равный 0 9 — — 0 95; qr — площадь сечения сердечника магнитопровода; F — величина магнитного потока.
О 95 — коэффициент заполнения пакетов сталью ( коэффициент пакета), учитывающий изоляцию листов стали, который равен отношению длины стали пакета к полной длине его.
Важной операцией является снятие заусенцев, которые снижают коэффициент заполнения пакета и увеличивают потери на вихревые токи при замыкании пластин по контуру. Допустимая величина заусенцев не должна превышать 5 мкм
Заусенцы удаляют при помощи шлифовального круга или электрополированием. В последнем случае повышается магнитная проницаемость и снижаются потери на гистерезис, что вероятно связано с удалением при электрополировании поверхностного слоя металла с краев пластины, где имеет место наклеп.
При расчете магнитной цепи переменного тока необходимо учитывать коэффициент заполнения пакета сталью kc, который зависит от рода изоляции и толщины листов стали. Для листов толщиной 0 5 и 0 35 мм kc соответственно равен 0 95 и 0 9, если листы изолированы специальным лаком, или 0 9 и 0 85, если они оклеены бумагой.
Заполнение такого пакета сталью зависит от толщины листов стали, толщины изоляционной пленки, качества поверхности листов и усилия запрессовки и учитывается коэффициентом заполнения пакета сталью ( kc), равным отношению сечения чистой стали ( без изоляции) ко всему сечению пакета.
|
Пластина пакета статора.| Пластина пакета ротора. |
Если магнитные свойства стали определяются на переменном токе, то кривые намагничивания обычно снимаются для пакета, выполненного в виде тора, имеющего свой коэффициент заполнения пакета сталью.
Снижение потерь путем уменьшения толщины стали практически ограничено толщиной 0 28 — 0 30 мм, так как при дальнейшем снижении толщины резко уменьшается коэффициент заполнения пакетов сталью, что приводит к росту намагничивающего тока и потерь в магнитопро-воде, а также существенно увеличивается трудоемкость изготовления магнитопровода. Увеличение содержания кремния в стали ( до 5 %) приводит к повышению ее хрупкости и затрудняет механическую обработку пластин.
Для того чтобы в последнем соотношении получить для q размерность вт / м3, необходимо подставлять q в вт / кг и у, удельный вес стали, в кг / ма; fcT обозначает коэффициент заполнения пакета стальных листов. Во всяком случае величины q и тем самым q всегда следует считать известными.
Из-за наличия между листами стали изоляции, их волнистости и неоднородности по толщине не весь объем спрессованного сердечника заполнен сталью. Коэффициент заполнения пакета сталью при изоляции лаком в среднем составляет kc 0 93 при толщине листов 0 5 мм и & с 0 90 при 0 35 мм.
Из-за наличия между листами стали изоляции, их волнистости и неоднородности по толщине не весь объем спрессованного сердечника заполнен сталью. Коэффициент заполнения пакета сталью при изоляции лаком в среднем составляет kc 0 93 при толщине листов 0 5 мм и kc — 0 90 при 0 35 мм.
Они замыкают соседние пластины, что приводит к увеличению тепловых потерь. Кроме того, заусенцы снижают коэффициент заполнения пакета, что еще более увеличивает потери вследствие повышения магнитной индукции в сравнении с расчетным значением.
При сборке в пакеты пластин, имеющих заусенцы, возможно замыкание отдельных пластин, что увеличивает вихревые токи. Кроме того, наличие заусенцев на пластинах снижает коэффициент заполнения пакета сталью. Поэтому в технологический процесс изготовления магнитопроводов вводится операция удаления заусенцев на пластинах. Известно несколько способов удаления заусенцев: 1) снятие заусенцев на специальном шлифовальном станке; 2) вальцовка ( закатка) заусенцев при помощи закатных валков; 3) снятие заусенцев при помощи скребков; 4) зачистка зяусениев вращающимися металлическими щетками.
Регулировка скважности
Для получения сигнала с управляемой скважностью удобно использовать ШИМ — контроллеры. Эти специализированные микросхемы как раз спроектированы, чтобы формировать сигналы со коэффициентом заполнения, зависящим от внешних условий
Для примера рассмотрим схемы на интегральном ШИМ — контроллере 1156ЕУ3 или UC3823.
|
Вашему вниманию подборки материалов: Конструирование источников питания и преобразователей напряжения Разработка источников питания и преобразователей напряжения. Типовые схемы. Примеры готовых устройств. Онлайн расчет. Возможность задать вопрос авторам Практика проектирования электронных схем Искусство разработки устройств. Элементная база. Типовые схемы. Примеры готовых устройств. Подробные описания. Онлайн расчет. Возможность задать вопрос авторам |
На схеме (A1) изображен генератор импульсов со скважностью, зависящей от уровня входного напряжения, подаваемого на ножку 2. Увеличение входного напряжения приводит к увеличению коэффициента заполнения, то есть уменьшению скважности
Генератор по схеме (A2) наоборот формирует импульсы с большим коэффициентом заполнения (меньшей скважностью) при уменьшении входного напряжения. Скважность импульсов генератора (A3) регулируется вручную с помощью подстроечного резистора R5
Скважность импульсов генератора (A3) регулируется вручную с помощью подстроечного резистора R5. Во всех схемах используются одинаковые детали
Выходной сигнал формируется на ножке 14. Подключать к этой ножке можно нагрузку до 2 А (импульсно). Питание осуществляется от источника от 12 до 30 вольт
Во всех схемах используются одинаковые детали. Выходной сигнал формируется на ножке 14. Подключать к этой ножке можно нагрузку до 2 А (импульсно). Питание осуществляется от источника от 12 до 30 вольт.
Микросхема D1 — ШИМ — контроллер 1156ЕУ3 / UC3823.
Резистор R1 — 10 кОм, подстроечный. С помощью него регулируется начальный уровень сигнала, при котором появятся импульсы минимальной длительности.
Резистор R2 — 100 кОм
Резистор R3 — 500 кОм, подстроечный. Он регулирует чувствительность, то есть увеличение этого резистора приводит к тому, что сигнал заданной амплитуды приводит к большему изменению коэффициента наполнения.
Резистор R4, Конденсатор C1 — задают частоту выходного сигнала. Формула для расчета частоты в зависимости о параметров этих деталей.
Резистор R5 — 100 кОм, подстроечный. Он регулирует максимально возможный коэффициент наполнения, а в схеме (A3), просто коэффициент заполнения.
Конденсатор C1 — 0.1 мкФ.
Готовое устройство, иллюстрирующее управление скважностью — Тренажер для снятия усталости глаз и спазма аккомодации
Причины и области применения ШИМ
Принцип широтно-импульсной модуляции используется в регуляторах частоты вращения мощных асинхронных двигателей. В этом случае модулирующий сигнал регулируемой частоты (однофазный или трехфазный) формируется маломощным генератором синусоиды и накладывается на несущую аналоговым способом. На выходе получается ШИМ-сигнал, который подается на ключи потребной мощности. Дальше можно пропустить получившуюся последовательность импульсов через фильтр низкой частоты, например через простую RC-цепочку, и выделить исходную синусоиду. Или можно обойтись без нее – фильтрация произойдет естественным образом за счёт инерции двигателя. Очевидно, что чем выше частота несущей, тем больше форма выходного сигнала близка к исходной синусоиде.
Возникает естественный вопрос – а почему нельзя усилить сигнал генератора сразу, например, применением мощных транзисторов? Потому что регулирующий элемент, работающий в линейном режиме, будет перераспределять мощность между нагрузкой и ключом. При этом на ключевом элементе впустую рассеивается значительная мощность. Если же мощный регулирующий элемент работает в ключевом режиме (тринистор, симистор, RGBT-транзистор), то мощность распределяется во времени. Потери будут намного ниже, а КПД – намного выше.
В цифровой технике особой альтернативы широтно-импульсному регулированию нет. Амплитуда сигнала там постоянна, менять напряжение и ток можно лишь промодулировав несущую по ширине импульса и впоследствии усреднив её. Поэтому ШИМ применяют для регулирования напряжения и тока на тех объектах, которые могут усреднять импульсный сигнал. Усреднение происходит разными способами:
- За счет инерции нагрузки. Так, тепловая инерция термоэлектронагревателей и ламп накаливания позволяет объектам регулирования заметно не остывать в паузах между импульсами.
- За счёт инерции восприятия. Светодиод успевает погаснуть от импульса к импульсу, но человеческий глаз этого не замечает и воспринимает как постоянное свечение с различной интенсивностью. На этом принципе построено управление яркостью точек LED-мониторов. Но незаметное мигание с частотой несколько сот герц все же присутствует и служит причиной усталости глаз.
- За счет механической инерции. Это свойство используется при управлении коллекторными двигателями постоянного тока. При правильно выбранной частоте регулирования двигатель не успевает затормозиться в бестоковых паузах.
Поэтому ШИМ применяют там, где решающую роль играет среднее значение напряжения или тока. Кроме упомянутых распространенных случаев, методом PWM регулируют средний ток в сварочных аппаратах и зарядных устройствах для аккумуляторных батарей и т.д.
Если естественное усреднение невозможно, во многих случаях эту роль на себя может взять уже упомянутый фильтр низкой частоты (ФНЧ) в виде RC-цепочки. Для практических целей этого достаточно, но надо понимать, что без искажений выделить исходный сигнал из ШИМ с помощью ФНЧ невозможно. Ведь спектр PWM содержит бесконечно большое количество гармоник, которые неизбежно попадут в полосу пропускания фильтра. Поэтому не стоит строить иллюзий по поводу формы восстановленной синусоиды.
Очень эффективно и эффектно управление методом ШИМ RGB-светодиодом. Этот прибор имеет три p-n перехода – красный, синий, зеленый. Изменяя раздельно яркость свечения каждого канала, можно получить практически любой цвет свечения LED (за исключением чистого белого). Возможности по созданию световых эффектов с помощью PWM безграничны.
Наиболее употребительная сфера применения цифрового сигнала, промодулированного по длительности импульса – регулирование среднего тока или напряжения, протекающего через нагрузку. Но возможно и нестандартное использование этого вида модуляции. Все зависит от фантазии разработчика.
Что такое импульсный блок питания и где применяется
Что такое аттенюатор, принцип его работы и где применяется
Что такое частотный преобразователь, основные виды и какой принцип работы
Преобразователи напряжения с 12 на 220 вольт
Что такое диодный мост, принцип его работы и схема подключения
Что такое триггер, для чего он нужен, их классификация и принцип работы
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T. D = t/T. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения
S = T/t.
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Коэффициент — заполнение — сердечник
|
Размеры паза в штампе свету. |
Коэффициент заполнения сердечника сталью зависит от толщины электроизоляционного покрытия.
Коэффициентом заполнения сердечника является отношение истинного объема стали или сплава, находящегося в пакете, ко всему объему пакета.
Чистое сечение сердечника вычислено для коэффициента заполнения сердечника кс 0 88; вес трансформатора рассчитан для удельного веса магнитного материала, равного 7 6, при обмотках из медного провода с учетом веса арматуры сердечника в 5 % от веса магнитного материала и с учетом веса изоляции провода и обмоток в 10 % веса меди.
Отношение Sl ( ab) называют коэффициентом заполнения сердечника.
Геометрическую площадь сечения ленточного сердечника необходимо умножить на коэффициент заполнения сердечника для получения эффективного значения площади. Размер сердечника зависит от площади его поперечного сечения, а площадь сечения должна соответствовать используемым обмоткам. Размеры сердечника трансформатора, приведенные в настоящей главе, не являются оптимальными. Этот выбор обусловлен наличием пригодного сердечника. Предполагается, что величина напряжения, подводимого к первичной обмотке, равна 8 в.
|
Коэффициенты заполнения шихтованных пластинчатых сердечников.| Влияние изоляции пластин на потери шихтованных сердечников. |
Способ изоляции пластин, так же как и их толщина и состояние поверхности, влияет на величину коэффициента заполнения сердечника кс.
|
Сердечник главного полюса.| Сердечник главного полюса с компенсационной обмоткой. |
Вмч да 1 4 — т — 1 6 Т — индукция в сердечнике полюса при часовом режиме; / Сиз 0 96 — 0 98 — коэффициент заполнения сердечника сталью.
Рассмотрим последовательно эти величины. Максимально достижимая величина коэффициента заполнения сердечника кс зависит только от толщины материала и технологии изготовления сердечника.
Для того чтобы уменьшить потери на вихревые токи, сердечник набирают из возможно более тонких пластин. Однако чем тоньше пластины, тем меньше коэффициент заполнения сердечника ( отношение поперечного сечения магнитного материала в сердечнике к общему поперечному сечению), так как все большую площадь начинает занимать клей, соединяющий пластины. Кроме того, очень тонкие пластины трудно штамповать, собирать вместе и склеивать. Поэтому пластины тоньше 50 мк не используют. Для магнитных головок записи и воспроизведения, работающих в диапазоне звуковых частот, наиболее употребительны пластины толщиной 0 2 мм Пластины должны быть отштампованы без малейших заусенцев и отожжены в безокислительной среде при термическом режиме, указанном в сертификате на данный магнитный материал.
С уменьшением степени использования материала объем увеличивается. Практически использование материала бывает далеко неполным и, кроме того, необходимо учитывать коэффициент заполнения сердечника ферромагнетиком.
|
Крепление сердечника полюса заклепками ( а и стержнем ( б. |
Полюса для уменьшения потерь набирают из листов толщиной 1 — 2 мм. При больших толщинах затрудняется штамповка листов и увеличиваются поверхностные потери, при меньших толщинах увеличиваются затраты труда вследствие увеличения количества листов, а также уменьшается коэффициент заполнения сердечника сталью.
Общая информация
К основным параметрам последовательности импульсов относятся:
- l амплитуда импульса – Um,
- l длительность импульса – tu,
- l длительность паузы – tn,
- l период следования T или частота f = 1/T следования.
Если длительность tu всех импульсов, входящих в состав последовательности, и всех пауз tn постоянна в течение времени, то она называется периодической.
Важным параметром периодического импульсного процесса является скважность импульсов S. Скважность импульсов – это отношение периода следования к длительности импульса, рассчитывается по формуле:
Эффективность S при управлении устройства достигается при стабильной частоте сигнала. Иногда используют обратную величину D – коэффициент заполнения, рассчитывается по формуле:
При равенстве tu и tn скважность равна 2, и сигнал называется меандром. S и D – безразмерные величины, так как время делится на время
В цифровых устройствах применяются импульсы различной формы. Формой импульса называется графическое изображение закона изменения импульсного напряжения во времени. На рис. ниже показаны формы сигналов:
- а – прямоугольная,
- б – трапецеидальная,
- в – экспоненциальная,
- г – колокольная,
- д – ступенчатая,
- е – пилообразная.
Техническая характеристика формы импульсов связана с количественной оценкой основных параметров импульса, свойств отдельных его участков, которые играют разную роль при воздействии импульса на устройство. На рис. выше изображены идеализированные формы импульса. Из-за переходных процессов в устройствах (формирования и усиления импульсов) существует реальная форма, например, прямоугольного импульса (рис. ниже).
Основные параметры импульса – это:
- l Размах импульса – Um,
- l Длительность импульса – tи,
- l Длительность переднего фронта – tф,
- l Длительность заднего фронта – tсп,
- l Спад вершины – ΔU,
- l Размах выброса заднего фронта – Um обр,
- l Длительность выброса заднего фронта – tи обр.
Указанные величины считываются между уровнями 0.1 и 0.9 от амплитуды в микросекундах, в зависимости от частоты сигнала. Амплитудные – в вольтах.
Определить параметры импульсного сигнала можно с помощью осциллографа, частотомера или мультиметра.
Дифференцирующие цепи
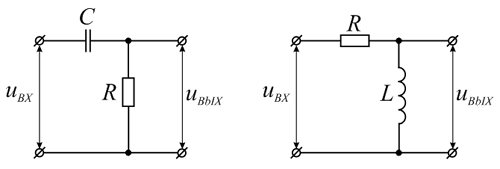
Довольно часто в электронике вообще, а в импульсной в частности требуется преобразовать один вид импульсов в другой (например, прямоугольный преобразовать в треугольный). Для этой цели используют различные схемы, в основе которых простейшие RC- и RL-цепи. Такие цепи называются дифференцирующими и интернирующими цепями. Для начала рассмотрим дифференцирующие цепи, которые показаны на изображении ниже.
Своё название дифференцирующие цепи получили от того, что напряжение на выходе такой цепи пропорционально производной входного напряжения, а нахождение производной в математике называется дифференцирование. В случае RC-цепи напряжение снимается с резистора, а в случае RL-цепи – с индуктивности.
Простейшие
.
В настоящее время большинство дифференцирующих цепей основаны на RC-цепях, поэтому будем рассматривать их, но все основные выкладки соответствуют также и RL-цепям.
Рассмотрим, как дифференцирующая цепь будет реагировать на прямоугольный импульс. Прямоугольный импульс представляет собой как бы два скачка напряжения. Реакцию RC-цепи на скачкообразное изменение напряжения рассматривалась выше, а в случае прямоугольного импульса выходное напряжение с дифференцирующей цепи будет в виде двух коротких импульсов различной полярности, длительность которых соответствует 3τ = 3RC
и3τ = 3L/R , в случае RL-цепи.
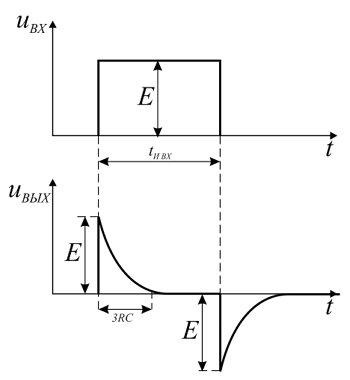
Реакция дифференцирующей цепи на прямоугольный импульс. Из величины и формы выходного напряжения можно сделать вывод, что дифференциальные цепи вполне могут применяться для уменьшения длительности импульсов, что довольно часто применяется на практике и ранее такие цепи иногда называли укорачивающими.
Пилообразный сигнал
Пилообразный сигнал — это еще один тип периодического сигнала. Как следует из названия, форма такого сигнала напоминает зубья пилы. Пилообразный сигнал может иметь зеркальное отражение самого себя, имея либо медленный рост, но очень крутой спад, или чрезвычайно крутой, почти вертикальный рост и медленный спад.
Пилообразный сигнал с медленным ростом является более распространенным из двух типов сигналов, являющийся, практически, идеально линейным. Пилообразный сигнал генерируется большинством функциональных генераторов и состоит из основной частоты (f) и четных гармоник. Это означает, с практической точки зрения, что он богат гармониками, и в случае, например, с музыкальными синтезаторами, для музыкантов дает качественный звук без искажений.
Выбор магнитопровода
Основным технологическим требованием при проектировании магнитопровода является сведение к возможному минимуму количества штампов и приспособлений, необходимых для его изготовления. Поэтому количество типоразмеров магнитопроводов ограничено и представлено в виде рядов магнитопроводов. Рядом магнитопроводов называется совокупность геометрически подобных материалов, обеспечивающая возможность разработки трансформаторов в заданном диапазоне мощностей. В зависимости от поставленных требований могут существовать ряды, обеспечивающие получение минимальных массы, объема или стоимости.
Для трансформатора с данными параметрами можно выбрать магнитопровод Ш14•32:
Рисунок 2.1 — Броневой пластинчатый магнитопровод типа Ш
Количество пластин = 83 шт.;
Как определить габаритную мощность трансформатора?
В настоящее время основными критериями для разработки трансформатора является его минимальный размер и масса. Однако снижать габариты трансформатора можно лишь до некоторых пределов, которые ограничены допустимой рабочей температурой. Это связано с тем, что нагрев трансформатора зависит от потерь мощности в сердечнике и в обмотках, которые растут с уменьшением размеров трансформатора. Кроме этого перегрев связан с уменьшением площади теплоотдачи трансформатора.
В связи с этим для связи конструктивных и электромагнитных параметров трансформатора ввели понятие габаритной мощности трансформатора РГ, которая определяется как полусумма мощностей всех его обмоток
где Р1, Р2 и Рi – соответственно мощности первичной, вторичной и i-й обмотки трансформатора.
В случае наличия у трансформатора обмоток со средней точкой необходимо приводить такие трансформаторы к двухобмоточным. Выражения для определения габаритной мощности трансформатора в зависимости от типа обмоток приведены ниже.
Для трансформатора с двумя обмотками без отводов
где Р1 – мощность поступающая на первичную обмотку,
Р2 – мощность снимаемая с вторичной обмотки,
η – КПД трансформатора.
Для трансформатора с одной первичной обмоткой и одной вторичной обмоткой со средней точкой
Для трансформатора с одной первичной обмоткой со средней точкой и одной вторичной обмоткой без отводов
Для трансформатора с одной первичной обмоткой со средней точкой и одной вторичной обмоткой со средней точкой
Широтно-импульсное регулирование ШИР
В западной литературе практически не различают понятия широтно-импульсного регулирования ШИР и широтно-импульсной модуляции ШИМ. Однако у нас различие между ними все же существует.
Сейчас во многих микросхемах, особенно применяемых в DC-DC преобразователях, реализован принцип ШИР. Но при этом их называют ШИМ контроллерами. Поэтому теперь различие в названии между этими двумя способами практически отсутствует.
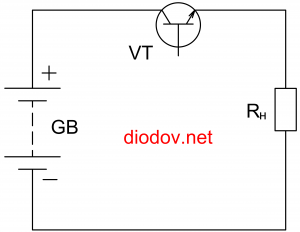 В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного и задающего напряжения, а также компаратор.Рассмотрим упрощенную схему, в которой аккумуляторная батарея GB питает потребитель Rн импульсным способом посредством транзистора VT. Сразу скажу, что в данной схеме я специально не использовал такие элементы, необходимые для работы схемы: конденсатор, дроссель и диод. Это сделано с целью упрощения понимания работы ШИМ, а не всего преобразователя.
В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного и задающего напряжения, а также компаратор.Рассмотрим упрощенную схему, в которой аккумуляторная батарея GB питает потребитель Rн импульсным способом посредством транзистора VT. Сразу скажу, что в данной схеме я специально не использовал такие элементы, необходимые для работы схемы: конденсатор, дроссель и диод. Это сделано с целью упрощения понимания работы ШИМ, а не всего преобразователя.
Упрощенно, компаратор имеет три вывода: два входа и один выход. Компаратор работает следующим образом. Если величина напряжения на входном выводе «+» (неинвертирующий вход) выше, чем на входе «-» (инвертирующий вход), то на выходе компаратора будет сигнал высокого уровня. В противном случае – низкого уровня.
В нашем случае, именно сигнал высокого уровня открывает транзистор VT. Рассмотрим, как формируется необходимая длительность времени импульса tи. Для этого воспользуемся следующим графиком.
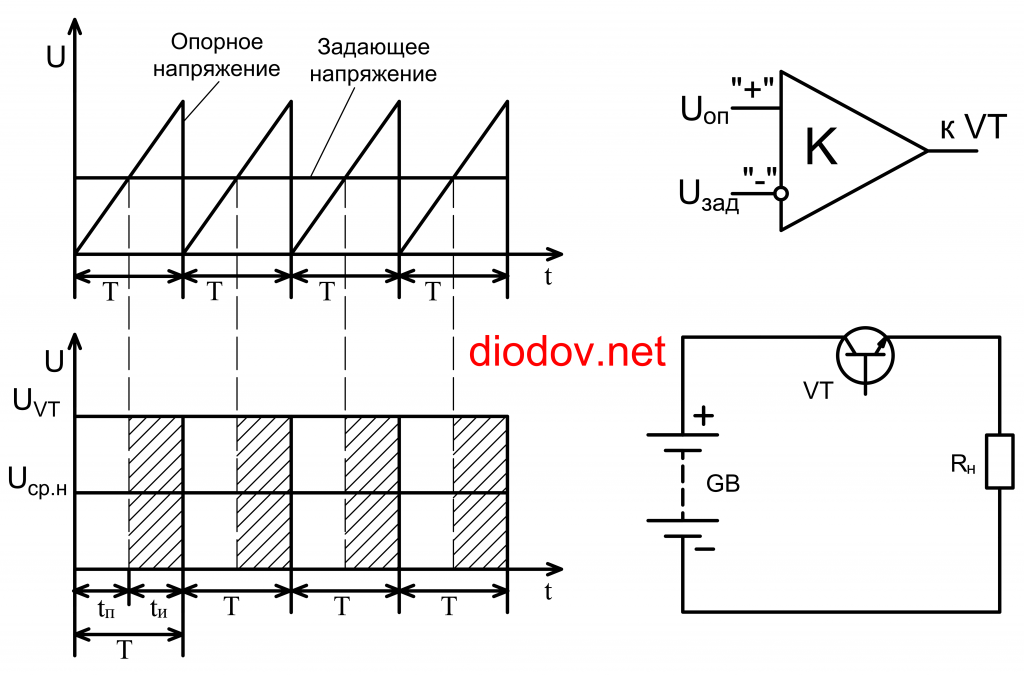
При ШИР на одни вход компаратора подается сигнал пилообразной формы заданной частоты. Его еще называют опорным. На второй вход подается задающее напряжение, которое сравнивается с опорным. В результате сравнения на выходе компаратора формируется импульс соответствующей длительности.
Если на неинверитирующем входе компаратора опорный сигнал, то сначала будет идти пауза, а затем импульс. Если на неинвертирующий вход подать задающий сигнал, то сначала будет импульс, затем пауза.
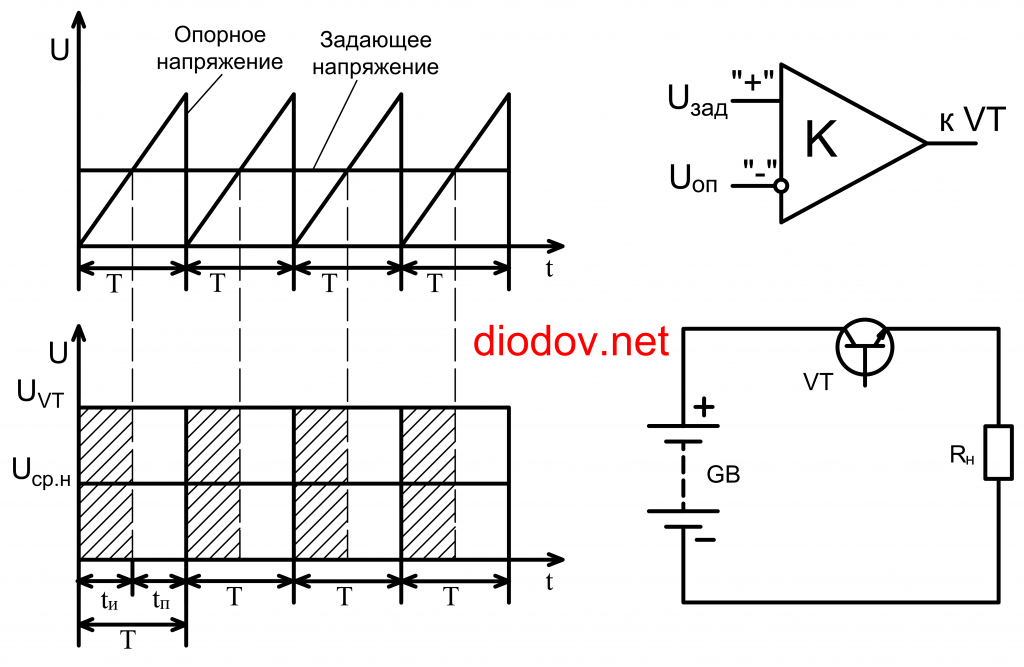
Таким образом, изменяя значение задаваемого сигнала, можно изменять коэффициент заполнения, а соответственно и среднее напряжение на нагрузке.
Частоту опорного сигнала стремятся сделать максимальной, чтобы снизить параметры дросселей и конденсаторов (на схеме не показаны). Последнее приводит к снижению массы и габаритов импульсного блока питания.
https://youtube.com/watch?v=6CVvEcL6mOw
Как подключить к нагрузке
Напрямую генератор ШИМ сигнала к нагрузке подключать не следует, потому как он слаботочный и скорее все сразу же сгорит. Для того, чтобы управлять нагрузкой необходим ключ на мосфет-транзисторе. Берём N-канальный мосфет-транзистор IRF3205 и собираем всё по схеме:
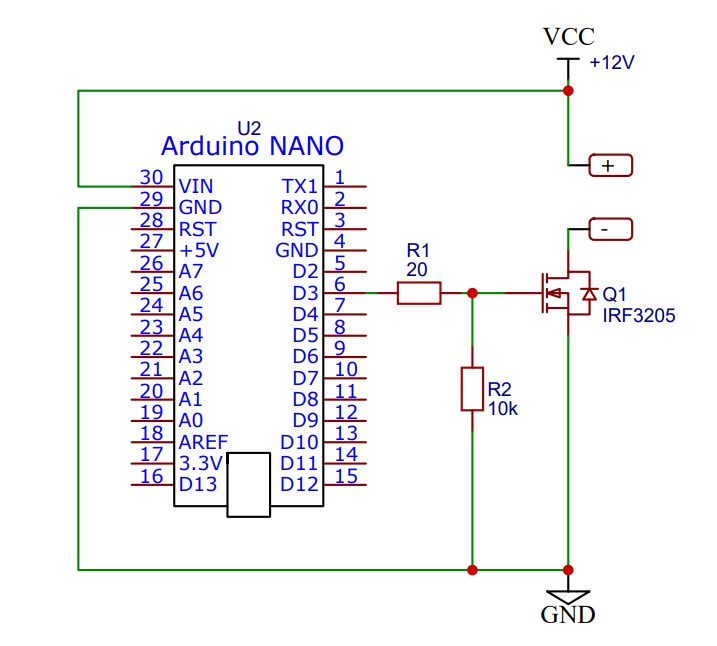 Ардуино ШИМ на IRF3205
Ардуино ШИМ на IRF3205
Резистор R1 нужен для защиты пина ардуинки от выгорания, а резистор R2 для того, чтобы транзистор полностью закрывался, когда ардуина не даёт выходного сигнала.
Как видно ничего сложного. Четыре элемента и ШИМ-контроллер готов. Он уже может управлять одноцветной светодиодной лентой или каким-нибудь моторчиком.
Если нужна трехцветная лента или больше лент (делаем многоканальный ШИМ), просто добавляем ключи на пины D3, D5, D6, D9, D10, D11 (только на них работает ШИМ). Итого, Ардуина способна управлять мощностью 6-ти устройств одновременно.
Применение
Для формирования прямоугольных колебаний применяется микросхема аналогового типа или чип-контроллер. Сами колебания управляют только нагрузкой, идущей от источника тока. Подключение производится через ключевую схему на полупроводнике. Ключ имеет всего два состояния: либо он включён в сеть, либо размыкает её.
Грубо говоря, все зависит от характеристик колебаний. Так, если светильник подключен через подобную схему, то при низкой частоте работы устройства лампа будет мигать с определенной периодичностью, но при превышении её сверх 50Гц в человеческих глазах отдельные всплески света сольются в одно ровное свечение. Это особенность человеческого глаза, который не улавливает колебания свыше этого значения. Но и яркость свечения можно регулировать. Чем ниже коэффициент заполнения, а, следовательно, и значение, обратное ему, тем меньше яркость свечения источника.
Аналогичный пример можно использовать и с двигателем постоянного тока, под управлением широтно-импульсного регулятора. При этом низкая частота приведёт к снижению оборотов двигателя, в то время как высокая – к его эффективной работе. Для её достижения используются ключи-полупроводники, обладающие значительным быстродействием и низким коэффициентом проводимости, так как в противном случае возможно запаздывание сигнала.
При необходимости сигналы схемы импульсного регулятора можно усреднять, для этого используются фильтры низких частот, но при подключении двигателя с большой механической инерцией и хорошим значением индуктивности. В этом случае снижение амплитуды и частоты происходит самопроизвольно.
Скважность, а также её обратное значение зависят от уровня моделирующего сигнала, частота таких устройств определяется частотой дублирующего генератора, подающего дополнительный сигнал
Генератор для получения скважности
Основные выводы
Импульсное защитное устройство – необходимый элемент подключения газоразрядных источников света. Оно подбирается исходя их типа лампы и ее мощности.
Соблюдайте схему подключения указанную на корпусе.
Двухконтактные приборы дешевле, но менее безопасны. При их использовании необходимо подключать балласт с изоляцией, которая выдерживает высокие напряжения, иначе велика вероятность пробоя. При включении схемы с неработающими лампами дополнительное оборудование выйдет из строя.
Трехконтактные приборы лишены перечисленных недостатков. Однако, при выработке ресурса лампы они могут начать беспрерывно работать и выйти из строя. Для предотвращения этого стоит выбирать защитные устройства с таймером отключения.