Аналоговые, цифровые и шим пины Ардуино
Все пины можно разделить на несколько видов, различие будет только в количестве данных выводов на различных платах. Например, на Arduino Mega 2560 цифровых и аналоговых портов, значительно больше, чем на Uno или Nano из-за большего размера платы и производительности микроконтроллера. В остальном характеристики и способы программирования пинов не отличаются друг от друга.
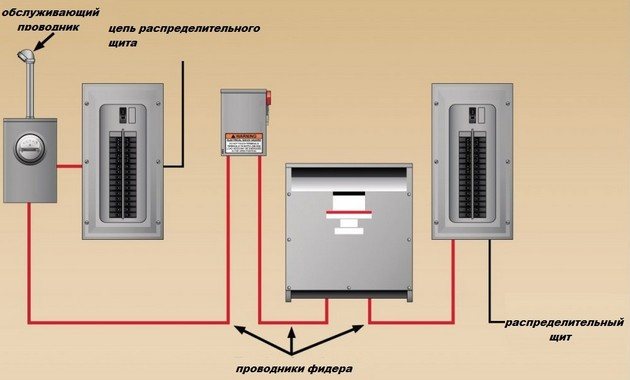
- Power Pins — порты питания, режим их работы нельзя запрограммировать или изменить. Они выдают стабилизированное напряжение 5V или 3,3V, Vin выдает напряжение от источника питания, а GND — это заземление (общий минус);
- PWM Pins — порты с ШИМ модуляцией, которые можно запрограммировать, как цифровой выход/вход. Данные порты обозначены на плате знаком тильда (˜);
- Analog In — порты, принимающие аналоговый сигнал от датчиков, работают на вход. Данные порты тоже можно запрограммировать, как цифровой вход/выход. Данные пины не поддерживают ШИМ модуляцию.
Режим пинов назначается в процедуре void setup с помощью pinMode(), например:
void setup() {
pinMode(10, OUTPUT); // объявляем пин 10 как выход
pinMode(A2, OUTPUT); // объявляем пин A2 как выход
pinMode(12, INPUT); // объявляем пин 12 как вход
pinMode(A1, INPUT); // объявляем пин A1 как вход
}
Пояснения к коду:
- к выходу 10 и A2 можно подключить светодиод, который будет включаться и выключаться при вызове команды в программе;
- пин 10 может использоваться для ШИМ сигнала, например, чтобы плавно включить светодиод, а пин A2 может выдавать только цифровой сигнал (0 или 1);
- к входу 12 и A1 можно подключить цифровой датчик и микроконтроллер будет проверять наличие сигнала на этих пинах (логический нуль или единицу);
- к входу A1 можно подключить аналоговый датчик тогда микроконтроллер будет получать не только сигнал но и узнавать характеристику сигнала.
Мы не случайно разделили пины с ШИМ модуляцией (PWM Pins) и аналоговые. PWM пины создают аналоговый сигнал, к ним подключают сервопривод, шаговый двигатель и другие устройства, где требуется подавать сигнал с разными характеристиками. Аналоговые пины (Analog In) используются для подключения аналоговых датчиков, с них входящий сигнал преобразуется в цифровой с помощью встроенного АЦП.
Ардуино Uno пины: шим, аналоговые, цифровые
Arduino UNO распиновка платы на русском
| ШИМ (PWM) порты (Analog Out) |
3, 5, 6, 9, 10, 11 |
| Аналоговые порты (Analog In) |
A0, A1, A2, A3, A4, A5 на некоторых платах: A6, A7 |
| Цифровые порты (Digital In/Out) |
все порты со 2 по 13 пин можно использовать: A0 — A7 |
Из таблицы видно, какие пины на Arduino UNO поддерживают шим. Аналоговые пины (Analog In) используют, как цифровые если недостаточно портов общего назначения, например, вы хотите подключить к плате 15 светодиодов. Кроме того, на плате Arduino Uno и Nano порты A4 и A5 используются для I2C протокола (SDA и SCL пины) — они работают параллельно с пинами A4 и A5. Об этом мы расскажем чуть позже.
Ардуино Nano пины: шим, аналоговые, цифровые
Arduino Nano распиновка платы на русском
| ШИМ (PWM) порты (Analog Out) |
3, 5, 6, 9, 10, 11 |
| Аналоговые порты (Analog In) |
A0, A1, A2, A3, A4, A5 на некоторых платах: A6, A7 |
| Цифровые порты (Digital In/Out) |
все порты со 2 по 13 пин можно использовать: A0 — A7 |
Если вы заметили, то пины на Arduino Nano и Uno имеют одинаковое количество и назначение. Платы отличаются лишь своими габаритами. Nano — более компактная и удобная плата, для экономии места на нее не ставят разъем питания, для этого используются пины Vin и GND на которое подается питание от источника.
Ардуино Mega пины: шим, аналоговые, цифровые
Схема распиновки платы Arduino Mega 2560 r3
| ШИМ (PWM) порты (Analog Out) |
все порты со 2 по 13 пин дополнительно: 44, 45, 46 пин |
| Аналоговые порты (Analog In) |
с A0 до A15 |
| Цифровые порты (Digital In/Out) |
все порты со 2 по 13, со 22 по 52 пин можно использовать: A0 — A15 |
Пины коммуникации нежелательно использовать, как обычные цифровые порты. Особенно при таком количестве портов общего назначения, как на Mega 2560. Более подробную информацию о рассмотренных платах, а также о других микроконтроллерах семейства Arduino (Pro Mini, Leonardo, Due и пр.): характеристики, описание пинов, габариты и т.д. можно узнать в разделе Микроконтроллеры на нашем сайте.
Алгоритм управления Arduino
Программа управления симистором создана на базе таймера Timer1 и библиотеки Cyber.Lib, благодаря чему отсутствует влияние на работу других программных кодов. Принцип её действия следующий. При переходе сетевого напряжения через ноль «снизу вверх» таймер перенастраивается на обратный переход «сверху вниз» и начинает отсчёт времени в соответствии со значением переменной «Dimmer». В момент срабатывания таймера Arduino формирует управляющий импульс и симистор открывается. При следующем переходе через ноль симистор перестаёт пропускать ток и ожидает очередное срабатывание таймера. И так 50 раз в секунду. За регулировку задержки на открывание симистора отвечает переменная «Dimmer». Она считывает и обрабатывает сигнал с потенциометра и может принимать значение от 0 до 255.
4 Управление яркостью светодиода с помощью PWM и Arduino
Включаем питание. Светодиод плавно наращивает яркость, а затем плавно уменьшает. Мы сымитировали аналоговый сигнал на цифровом выходе с помощью широтно-импульсной модуляции.
Посмотрите приложенные видео, где наглядно показано изменение яркости светодиода, на подключённом осциллографе видно, как при этом меняется сигнал с Arduino.
Широтно-импульсная модуляция (ШИМ) Arduino UNO и NANO работает на аналоговых выходах 3, 5, 6, 9, 10, 11 с частотой 488,28 Гц. С помощью функции analogWrite частота ШИМ изменяется в диапазоне 0 до 255 и соответствует коэффициенту заполнения импульса от 0 до 100 %. Для многих устройств частота PWM Arduino NANO слишком мала, поэтому ее требуется увеличить. Рассмотрим, как это правильно сделать.
Широтно-импульсная модуляция Arduino
ШИМ, по-английски Pulse-Width Modulation (PWM) — это управление мощностью на нагрузке с помощью изменения скважности (ширины) импульсов при постоянной частоте и амплитуде сигнала. На следующем графике видно, что при разных значениях в функции , амплитуда импульсов остается постоянной, но меняется ширина импульсов
Мощность сигнала определяет коэффициент заполнения импульса.
График. Параметры сигнала, коэффициент заполнения ШИМ
Можно выделить две области применения широтно-импульсной модуляции:
1. PWM используется в источниках питания, регуляторах мощности и т.д. Применение ШИМ на Arduino Nano позволяет значительно упростить управление яркостью источников света (светодиодов, LED-ленты) и скоростью вращения двигателей.
2. PWM используется для получения аналогового сигнала. Цифро-аналоговый преобразователь (ЦАП) на Ардуино прост в реализации, так как требует минимума радиоэлементов — достаточно одной RC цепочки из резистора и конденсатора.
Основы импульсного преобразования
Работа подобных устройств, их ещё называют импульсными стабилизаторами (ИС), основана на ключевой стабилизации. В схеме имеется элемент, который выполняет регулировку выходных параметров за счёт своего запирания-отпирания.
В обычную трансформаторную схему входит трансформатор низкой частоты, имеющий первичную и вторичную обмотку. Импульсное преобразование тоже подразумевает наличие трансформатора, но уже высокочастотного.
Внимание! Высокочастотные импульсные трансформаторы обладают меньшими габаритами, дешевле, но их мощность выше. Импульсные преобразователи напряжения (ИПН) допускают использование схем трёх типов:
Импульсные преобразователи напряжения (ИПН) допускают использование схем трёх типов:
- повышающей;
- понижающей;
- инверторной.
ИПН обладают высоким КПД и малыми габаритами. Они включают в свой состав следующие элементы:
- блок питания (источник питания);
- ключ – элемент коммутации;
- накопитель энергии индуктивной природы – дроссель, катушка;
- диод блокировки;
- фильтр выходного напряжения – конденсатор большой емкости.
Фильтр обычно включается параллельно нагрузке.
Широтно-импульсная модуляция Arduino
ШИМ, по-английски Pulse-Width Modulation (PWM) — это управление мощностью на нагрузке с помощью изменения скважности (ширины) импульсов при постоянной частоте и амплитуде сигнала. На следующем графике видно, что при разных значениях в функции analogWrite , амплитуда импульсов остается постоянной, но меняется ширина импульсов
Мощность сигнала определяет коэффициент заполнения импульса.
График. Параметры сигнала, коэффициент заполнения ШИМ
Можно выделить две области применения широтно-импульсной модуляции:
1. PWM используется в источниках питания, регуляторах мощности и т.д. Применение ШИМ на Arduino Nano позволяет значительно упростить управление яркостью источников света (светодиодов, LED-ленты) и скоростью вращения двигателей.
2. PWM используется для получения аналогового сигнала. Цифро-аналоговый преобразователь (ЦАП) на Ардуино прост в реализации, так как требует минимума радиоэлементов — достаточно одной RC цепочки из резистора и конденсатора.
Откуда берётся ШИМ
Вариант 1 — аналоговый
ШИМ сигнал создаётся специально сконструированными устройствами – генераторами ШИМ сигнала или генераторами прямоугольных импульсов. Они могут быть собраны как на аналоговой базе, так и на основе микроконтроллеров, как в виде схемы из нескольких транзисторов, так и в виде интегральной микросхемы.
Самый простой вариант это микросхема NE555, собирается всё по схеме:
Схема ШИМ генератора на NE555
Но если лень разбираться и паять, то китайцы за нас всё уже давно сделали.
ШИМ генератор на NE555
Стоит $0,5, работает стабильно при питании от 5 до 16 вольт
Выдаёт ШИМ сигнал амплитудой в 5 вольт, скважность можно менять подстроечным резистором (вон та синяя штуковина с вырезом под отвертку). При желании можно заменить подстроечный резистор на переменный и получим удобную ручку регулировки
Вариант 2 – цифровой
Более сложный для новичка – использование микроконтроллера, но вместе с тем более интересный и дающий широкие возможности. Звучит страшно, но самом деле реализуется довольно просто.
В качестве микроконтроллера удобнее всего взять отладочную плату ардуино.
Как с ней работать написано вот здесь. Подключаем ардуинку к компьютеру и заливаем в неё вот такой наисложнейший код:
void setup() {
pinMode(3,OUTPUT); // опреднляем пин D3 как выход
}
void loop() {
int duty = 30; // определяем скважность равной 30%
int value = 255/10*duty; // переводим значение скважности в 8 битный формат
analogWrite(3, value); // выводим ШИМ значением value на пин D3
1
2
3
4
5
6
7
voidsetup(){
pinMode(3,OUTPUT);// опреднляем пин D3 как выход
}
voidloop(){
intduty=30;// определяем скважность равной 30%
intvalue=25510*duty;// переводим значение скважности в 8 битный формат
analogWrite(3,value);// выводим ШИМ значением value на пин D3
Далее цепляемся осциллографом к пину D3 и видим:
ШИМ скважность 30%
Сигнал частотой (Freq) -526 Гц, амплитудой (Vmax)- 5 вольт и скважностью (duty) – 30.9 %. Меняем скважность в коде — меняется и скважность на выходе
Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью
Меняем скважность в коде — меняется и скважность на выходе. Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью
Формирование аналогового сигнала
AnalogRead
– это функция, которая используется для считывания аналоговых значений из аналоговых контактов ШИМа на Ардуино. Плата Arduino UNO имеет 6-канальный 10-битный аналого-цифровой преобразователь (АЦП). Это означает, что АЦП в будет отображать входные напряжения от 0 до 5 В в целое значение от 0 до 1023.
Следовательно, функция analogRead возвращает любое значение от 0 до 1023. Синтаксис функции analogRead
– analogRead (аналоговый вывод no)
.
Поскольку мы считываем аналоговые напряжения от потенциометра на выводе A0, нам нужно написать analogRead (A0) в эскизе. Когда он возвращает целочисленное значение, с ним создается временная переменная целочисленного типа данных. Следующая функция – analogWrite. Это функция, которая используется для установки рабочего цикла сигнала ШИМ для любого заданного штыря ШИМ.
Синтаксис функции analogWrite – analogWrite (вывод
PWM no, value).
Значение указывает рабочий цикл и должно быть значением от 0 (0 В) до 255 (5 В).
Перейдем к фактическому эскизу схемы управления яркостью светодиода. Окончательный эскиз показан на следующем рисунке.
Из приведенного выше эскиза мы можем легко понять, что значение, возвращаемое функцией analogRead, сохраняется в переменной temp. Это значение будет использоваться для управления рабочим циклом сигнала ШИМ с помощью функции analogWrite.
Но диапазон значений, принимаемых функцией analogWrite, находится в диапазоне от 0 до 255. Следовательно, нам нужно выполнить некоторые математические вычисления, чтобы поместить подходящее значение в функцию analogWrite.
Наконец, вычисленное значение помещается в функцию analogWrite вместе с выводом PWM для получения сигнала PWM.
Когда схема построена, и эскиз загружен в Arduino, мы видим, что, изменяя положение потенциометра, яркость светодиода мы также можем изменить.
Еще один вариант скетча для Ардуино:
Int ledPin = 3; // объявляем пин, управляющий светодиодом
int brightness = 0; // переменная для задания яркости
int fadeAmount = 5; // шаг изменения яркости
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
analogWrite(ledPin, brightness); // устанавливаем яркость brightness на выводе ledPin
brightness += fadeAmount; // изменяем значение яркости
/* при достижении границ 0 или 255
меняем направление изменения яркости */
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount; // изменяем знак шага
}
delay(30); // задержка для большей видимости эффекта
}
Изменение частоты ШИМ Ардуино (разрядности)
Платы Arduino Uno и Arduino Nano на базе ATmega168/328 имеют 6 аппаратных ШИМ модуляторов на аналоговых портах 3, 5, 6, 9, 10, 11. Управление ШИМ сигналом осуществляется с помощью функции analogWrite , которая генерирует на выходе аналоговый сигнал и задает коэффициент заполнения импульса. Arduino устанавливает на выводах частоту 488,28 Гц и разрешение 8 разрядов (от 0 до 255).
Схема. Широтно-импульсная модуляция для чайников
В Arduino на базе ATmega168/328 для ШИМ используются три таймера:
Таймер 0 — выводы 5 и 6 Таймер 1 — выводы 9 и 10 Таймер 2 — выводы 3 и 11
ШИМ Ардуино определяется интегральными компонентами, называемыми таймерами. Каждый таймер в платах Arduino Uno и Nano на базе микроконтроллера ATmega168/328 имеет по два канала, подключенных к выходам. Для изменения частоты PWM сигнала требуется изменение таймера, к которому он подключается. При этом PWM изменится и на аналоговых выходах, подключенных параллельно к этому же таймеру.
Характеристики ШИМ сигнала
Важными характеристиками ШИМ сигнала являются:
амплитуда (U);
частота (f);
скважность (S) или коэффициент заполнения D.
Амплитуда в вольтах задается в зависимости от нагрузки. Она должна обеспечивать номинальное напряжение питания потребителя.
Частота сигнала, модулируемого по ширине импульса, выбирается из следующих соображений:
Чем выше частота, тем выше точность регулирования.
Частота не должна быть ниже времени реакции устройства, которым управляют с помощью ШИМ, иначе возникнут заметные пульсации регулируемого параметра.
Чем выше частота, тем выше коммутационные потери. Он возникают из-за того, что время переключения ключа конечно. В запертом состоянии на ключевом элементе падает все напряжение питания, но ток почти отсутствует. В открытом состоянии через ключ протекает полный ток нагрузки, но падение напряжения невелико, так как проходное сопротивление составляет единицы Ом. И в том, и в другом случае рассеяние мощности незначительно. Переход от одного состояния к другому происходит быстро, но не мгновенно. В процессе отпирания-запирания на частично открытом элементе падает большое напряжение и одновременно через него идёт значительный ток. В это время рассеиваемая мощность достигает высоких значений. Этот период невелик, ключ не успевает значительно разогреться. Но с повышением частоты таких временных промежутков за единицу времени становится больше, и потери на тепло повышаются
Поэтому для построения ключей важно использование быстродействующих элементов.
При управлении электродвигателем частоту приходится уводить за пределы слышимого человеком участка – 25 кГц и выше. Потому что при более низкой частоте ШИМ возникает неприятный свист.
Эти требования часто находятся в противоречии друг к другу, поэтому выбор частоты в некоторых случаях – это поиск компромисса.
Величину модуляции характеризует скважность. Так как частота следования импульсов постоянна, то постоянна и длительность периода (T=1/f)
Период состоит из импульса и паузы, имеющих длительность, соответственно, tимп и tпаузы, причем tимп+tпаузы=Т. Скважностью называется отношение длительности импульса к периоду – S=tимп/T. Но на практике оказалось удобнее пользоваться обратной величиной – коэффициентом заполнения: D=1/S=T/tимп. Еще удобнее выражать коэффициент заполнения в процентах.
Печатная плата и детали сборки
Минимум радиоэлементов позволяет сконструировать одностороннюю печатную плату, размер которой не превышает 20х35 мм. Как видно из рисунка на ней отсутствует переменный резистор, чтобы радиолюбитель мог самостоятельно подобрать потенциометр подходящего форм-фактора и определить место его крепления к корпусу готового диммера. Подключение к Arduino осуществляется через провода, которые запаивают в соответствующие отверстия на плате.
Для сборки своими руками диммера, управляемого Arduino, понадобятся следующие радиоэлементы и детали:
- Симистор BT136-600D, способный выдерживать обратное напряжение до 600 В и пропускать в нагрузку ток до 4 А (естественно с предварительным монтажом на радиатор). В схеме можно применить симистор и с большей нагрузочной способностью. Главное – обеспечить отвод тепла от его корпуса и правильно подобрать ток на управляющий электрод (справочный параметр). При подключении к нагрузке электроприбора большой мощности ширину печатных проводников в силовой части схемы необходимо будет пересчитать. Как вариант, силовые дорожки можно продублировать с другой стороны платы.
- Оптопара MOC3021 с симисторным выходом.
- Оптопара PC814 с транзисторным выходом.
- Резисторы номиналом 1 кОм, 220 Ом, 10 кОм мощностью 0,25 Вт и 2 резистора на 51 кОм мощностью 0,5 Вт.
- Переменный резистор на 10 кОм.
- Клеммные колодки – 2 шт., с двумя разъёмами и шагом 5 мм.
Формирование аналогового сигнала
AnalogRead – это функция, которая используется для считывания аналоговых значений из аналоговых контактов ШИМа на Ардуино. Плата Arduino UNO имеет 6-канальный 10-битный аналого-цифровой преобразователь (АЦП). Это означает, что АЦП в Arduino UNO будет отображать входные напряжения от 0 до 5 В в целое значение от 0 до 1023.
Следовательно, функция analogRead возвращает любое значение от 0 до 1023. Синтаксис функции analogRead – analogRead (аналоговый вывод no).
Поскольку мы считываем аналоговые напряжения от потенциометра на выводе A0, нам нужно написать analogRead (A0) в эскизе. Когда он возвращает целочисленное значение, с ним создается временная переменная целочисленного типа данных. Следующая функция – analogWrite. Это функция, которая используется для установки рабочего цикла сигнала ШИМ для любого заданного штыря ШИМ.
Синтаксис функции analogWrite – analogWrite (вывод PWM no, value).
Значение указывает рабочий цикл и должно быть значением от 0 (0 В) до 255 (5 В).
Перейдем к фактическому эскизу схемы управления яркостью светодиода. Окончательный эскиз показан на следующем рисунке.
Из приведенного выше эскиза мы можем легко понять, что значение, возвращаемое функцией analogRead, сохраняется в переменной temp. Это значение будет использоваться для управления рабочим циклом сигнала ШИМ с помощью функции analogWrite.
Но диапазон значений, принимаемых функцией analogWrite, находится в диапазоне от 0 до 255. Следовательно, нам нужно выполнить некоторые математические вычисления, чтобы поместить подходящее значение в функцию analogWrite.
Наконец, вычисленное значение помещается в функцию analogWrite вместе с выводом PWM для получения сигнала PWM.
Когда схема построена, и эскиз загружен в Arduino, мы видим, что, изменяя положение потенциометра, яркость светодиода мы также можем изменить.
Еще один вариант скетча для Ардуино:
int ledPin = 3; // объявляем пин, управляющий светодиодом
int brightness = 0; // переменная для задания яркости
int fadeAmount = 5; // шаг изменения яркости
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
analogWrite(ledPin, brightness); // устанавливаем яркость brightness на выводе ledPin
brightness += fadeAmount; // изменяем значение яркости
/* при достижении границ 0 или 255
меняем направление изменения яркости */
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount; // изменяем знак шага
}
delay(30); // задержка для большей видимости эффекта
}
Сравнение с линейным стабилизатором
Стабилизатор напряжения на транзисторе
Чтобы сравнить два принципа преобразования, нужно вспомнить, что линейные стабилизаторы (ЛС) – это обычно делитель напряжения. У него нестабильный потенциал подаётся на вход делителя, а стабильный – снимается со второго плеча (нижнего). Принцип стабилизации заключается в постоянном изменении сопротивления верхнего плеча схемы таким образом, чтобы на нижнем оно оставалось стабильным.
К сведению. Когда отношение Uвх/Uвых велико, то КПД линейного стабилизатора очень низкий. Это связано с потерями энергии на регулирующем резисторе. Он греется, оттого часть мощности на входе теряется.
У таких сборок есть свои плюсы, а именно: простота схемы, минимум элементов и неимение помех. По сравнению с линейными, импульсные стабилизаторы (ИС) сложнее, но работают стабильнее при правильно подобранной схеме.
В ИС могут возникать автоколебания, которые приводят к частичной неработоспособности или полному выходу преобразователя из строя. Это происходит в случае, когда импеданс источника Uвх превысит значение импеданса ИС, тогда при снижении Uвх повышается ток на входе.
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T. D = t/T. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения
S = T/t.
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
1Общие сведенияо широтно-импульсной модуляции
Цифровые выводы Arduino могут выдавать только два значения: логический 0 (LOW, низкий уровень) и логическую 1 (HIGH, высокий). На то они и цифровые. Но есть у Ардуино «особые» выводы, которые обозначаются PWM. Их иногда обозначают волнистой чертой «~» или обводят кружочками или ещё как-то выделяют среди прочих. PWM расшифровывается как Pulse-width modulation или широтно-импульсная модуляция, ШИМ.
Обозначение выходов с ШИМ на Arduino Leonardo
Широтно-импульсно модулированный сигнал – это импульсный сигнал постоянной частоты, но переменной скважности (соотношение длительности импульса и периода его следования). Из-за того, что большинство физических процессов в природе имеют инерцию, то резкие перепады напряжения от 1 к 0 будут сглаживаться, принимая некоторое среднее значение
С помощью задания скважности можно менять среднее напряжение на выходе ШИМ.
Если скважность равняется 100%, то всё время на цифровом выходе Arduino будет напряжение логическая «1» или 5 вольт. Если задать скважность 50%, то половину времени на выходе будет логическая «1», а половину – логический «0», и среднее напряжение будет равняться 2,5 вольтам
Ну и так далее.
Принцип работы широтно-импульсной модуляции (ШИМ)
В программе скважность задаётся не в процентах, а числом от 0 до 255. Например, команда analogWrite(10, 64) скажет микроконтроллеру подать на цифровой PWM выход №10 сигнал со скважностью 25%
Выводы Arduino с функцией широтно-импульсной модуляции работают на частоте около 500 Гц. Значит, период следования импульсов – около 2 миллисекунд, что и отмеряют зелёные вертикальные штрихи на рисунке.
Получается, что мы можем сымитировать аналоговый сигнал на цифровом выходе! Интересно, правда?!
Как же мы можем использовать ШИМ? Применений масса! Например, управлять яркостью светодиода, скоростью вращения двигателя, током транзистора, звуком из пьезоизлучателя и т.д.…
Как увеличить частоту и разрядность ШИМ Ардуино
Не существует способа изменить частоту ШИМ Arduino без прямого управления памятью на низком уровне. Рассмотрим далее, как изменить режим работы таймера, чтобы увеличить частоту (frequency) ШИМ Ардуино. Таймер 0
используется для расчета времени, т.е. функции delay и millis . Увеличение частоты на Таймер 0 приведет к нарушению функций сохранения времени, которые могут использоваться в скетче.
Чтобы увеличить разрядность Ардуино на 9 и 10 аналоговом выходе, изменим частоту Таймера 1
без библиотеки . Максимальная частота PWM может достигать на платах Ардуино Уно и Нано — 62 500 Гц. Для этого в процедуре void setup() необходимо добавить соответствующую команду из таблицы, которая приведена далее.
| Разрешение | Частота ШИМ | Команды установки режима |
| 8 бит | 62 500 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x09; |
| 7 812,5 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0a; |
|
| 976,56 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0b; |
|
| 244,14 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0c; |
|
| 61,04 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0d; |
Максимальная частота ШИМ Ардуино (Arduino PWM Frequency) — 62 500 Гц.
Широтно-импульсная модуляция, сокращенно ШИМ, может быть реализована на Arduino несколькими способами. В этой статье объясняются простые методы ШИМ, а также методы использования этих регистров для точного контроля над рабочим циклом и частотой.
Модуляция ширины импульса означает, что ширина импульса возникает строго в прямоугольной волне.
Это улучшает управление двигателем. Вместо чистого сигнала постоянного тока к двигателю используется серия импульсов. Они могут находиться на максимальном напряжении, но только на долю секунды. Выполнение повторных действий приведет к тому, что двигатель начнет вращаться. Это позволит более комфортно управлять скоростью. Простое применение сигнала постоянного тока не приведет к преодолению трения двигателя и передач, наоборот, запуск будет обрывистый с низкой скоростью.
Увеличивая частоту импульсов ШИМа на Ардуино, можно выполнять операции на высокой скорости.
Декодер создает этот сигнал для управления двигателем. Это та же концепция, что и функции мощности импульса, находящиеся на блоках питания постоянного тока.
Рассмотрим основные преимущества использования ШИМ Ардуино:
- Эффективность электропитания: индукция обмоток ротора будет усреднять ток (индукторы сопротивляются изменению тока). Транзисторы имеют низкий импеданс при низком падении напряжения и рассеивании мощности. Резистор рассеивает большую мощность (I2R) в виде тепла.
- Управление скоростью: двигатель будет видеть источник с низким импедансом, даже если он постоянно переключается между высоким и низким напряжением. Результат очевиден – двигатель ускоряется. Серийное сопротивление приведет к тому, что двигатель будет испытывать малое напряжение, поэтому легко остановится в нужный момент.
- Цепь управления: для цифровой электроники (например, микроконтроллера) очень легко включать или выключать напряжение с помощью транзисторов. Аналоговый выход (с электронным или механическим управлением) требует большего количества компонентов и увеличивает рассеивание мощности. Это будет более дорогостоящим вариантом, с точки зрения электроники и требований к электропитанию.
Создать широтно-импульсный модулятор можно на esp8266 шим, на Ардуино УНО и Ардуино Нано шим. То есть для конструирования подойдет любая модель описываемого микроконтроллера.
Преимущества ОС-регулирования
Обратная связь при регулировании напряжения в ИС является важной опцией для импульсных стабилизаторов. Она позволяет поддерживать на выходе устройства напряжение стабильной величины, чутко следя за бросками напряжения и тока
В ИСН применяется широкополосная ОС (чем шире интервал частот, тем меньше уровень пульсации в результате).
Доступность на рынке радиодеталей комплектующих для построения ИСН даёт возможность собрать своими руками любую из схем импульсных стабилизаторов. Использование в них готовых стабилизаторов на интегральных микросхемах (ИМС) и ключей на полевых транзисторах делает устройство максимально компактным.
Похожие записи:
 Монтаж ретропроводки в деревянном доме
Монтаж ретропроводки в деревянном доме
 ⓘ энциклопедия
ⓘ энциклопедия
 Как пользоваться паяльником: рассказ о том, как правильно паять провода
Как пользоваться паяльником: рассказ о том, как правильно паять провода
 Кашкаров андрей петрович современная электроника в практических схемах и конструкциях
Кашкаров андрей петрович современная электроника в практических схемах и конструкциях
 Приставка к мультиметру для измерения малых индуктивностей без дополнительного источника питания
Приставка к мультиметру для измерения малых индуктивностей без дополнительного источника питания
 Как выбрать и использовать удлинитель для сварочного инвертора?
Как выбрать и использовать удлинитель для сварочного инвертора?