Преимущества использования
Изготовить своими руками бесколлекторный электродвигатель сложно, а реализовать микроконтроллерное управление практически невозможно. Поэтому лучше всего использовать готовые промышленные образцы. Но обязательно учитывайте достоинства, которые получает привод при использовании бесколлекторных электродвигателей:
- Существенно больший ресурс, нежели у коллекторных машин.
- Высокий уровень КПД.
- Мощность выше, нежели у коллекторных моторов.
- Скорость вращения набирается намного быстрее.
- Во время работы не образуются искры, поэтому их можно использовать в условиях с высокой пожарной опасностью.
- Очень простая эксплуатация привода.
- При работе не нужно использовать дополнительные компоненты для охлаждения.
Среди недостатков можно выделить очень высокую стоимость, если учитывать еще и цену контроллера. Даже кратковременно включить для проверки работоспособности такой электродвигатель не получится. Кроме того, ремонтировать такие моторы намного сложнее из-за их особенностей конструкции.
Виды электродвигателей
Существуют следующие типы двигателей постоянного тока:
- с возбуждением при помощи постоянных магнитов;
- с последовательным соединением якоря и обмоток возбуждения;
- с параллельным соединением якоря и обмоток возбуждения;
- со смешанным соединением якоря и обмоток возбуждения;
- вентильный двигатель (бесколлекторный двигатель постоянного тока), выполненный при помощи замкнутой системы; в таком типе двигателя используется инвертор (силовой полупроводниковый преобразователь), преобразователь координат и ДПР (датчик положения ротора).
Двигателем переменного тока называют электрический двигатель, питание которого обеспечивает переменный ток. Существуют следующие типы двигателей переменного тока:
- гистерезисный двигатель;
- вентильный реактивный двигатель;
- асинхронный электродвигатель с частотой вращения ротора, отличающейся от частоты вращения создаваемого напряжением магнитного поля;
- синхронный электродвигатель с частотой вращения ротора, совпадающей с частотой вращения создаваемого напряжением магнитного поля.
Также существует УКД (универсальный коллекторный двигатель) с функцией режима работы как на переменном, так и на постоянном токе.
Ещё один тип двигателей – это шаговый электродвигатель с конечным числом положений ротора. Определённое указанное положение ротора фиксируется при помощи подачи питания на необходимые соответствующие обмотки. При снятии напряжения питания с одной обмотки и его передаче на другие происходит процесс перехода в другое положение.
Двигатель переменного тока при питании посредством промышленной сети обычно не позволяет достичь частоты вращения более трёх тысяч оборотов в минуту. По этой причине при необходимости получить более высокие частоты используется коллекторный двигатель, дополнительными преимуществами которого является лёгкость и компактность при сохранении необходимой мощности.
 Иногда также применяют специальный передаточный механизм под названием мультипликатор, который меняет кинематические параметры устройства до требуемых технических показателей. Коллекторные узлы иногда занимают до половины пространства всего двигателя, поэтому электродвигатели переменного тока уменьшают в размере и делают легче в весе путём использования преобразователя частоты, а иногда благодаря наличию сети с повышенной частотой до 400 Гц.
Иногда также применяют специальный передаточный механизм под названием мультипликатор, который меняет кинематические параметры устройства до требуемых технических показателей. Коллекторные узлы иногда занимают до половины пространства всего двигателя, поэтому электродвигатели переменного тока уменьшают в размере и делают легче в весе путём использования преобразователя частоты, а иногда благодаря наличию сети с повышенной частотой до 400 Гц.
Ресурс любого асинхронного двигателя переменного тока заметно выше коллекторного. Определяется он состоянием изоляции обмоток и подшипников. Синхронный же двигатель при использовании инвертора и датчика положения ротора считается электронным аналогом классического коллекторного двигателя, поддерживающего работу посредством постоянного тока.
Принцип действия BLDC двигателей
Бесколлекторные электродвигатели постоянного тока (BLDC двигатели) в настоящее время часто используются в потолочных вентиляторах и электрических движущихся транспортных средствах благодаря их плавному вращению. В отличие от других электродвигателей постоянного тока BLDC двигатели подключаются с помощью трех проводов, выходящих из них, при этом каждый провод образует свою собственную фазу, то есть получаем трехфазный мотор.
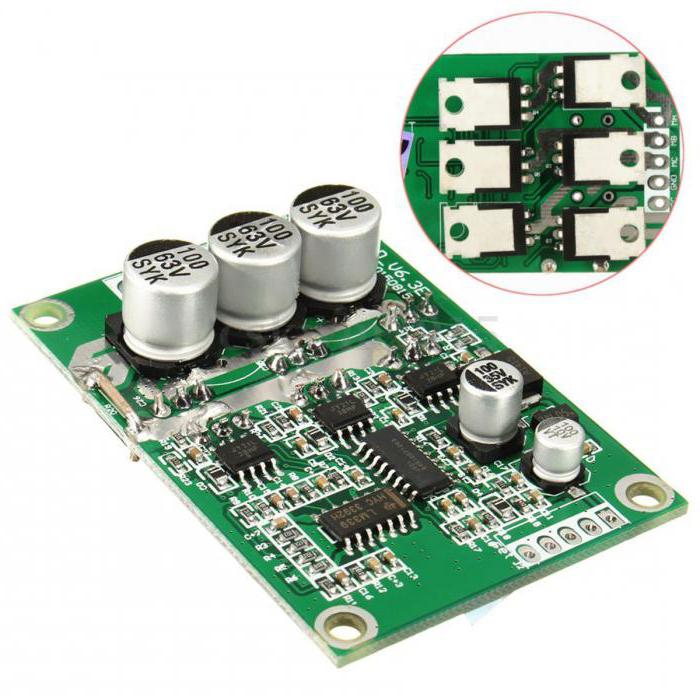
Хотя BLDC относятся к двигателям постоянного тока они управляются с помощью последовательности импульсов. Для преобразования напряжения постоянного тока в последовательность импульсов и распределения их по трем проводникам используется контроллер ESC (Electronic speed controller). В любой момент времени питание подается только на две фазы, то есть электрический ток заходит в двигатель через одну фазу, и покидает его через другую. Во время этого процесса запитывается катушка внутри двигателя, что приводит к тому, что магниты выравниваются по отношению к запитанной катушке. Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
Существуют различные типы BLDC двигателей – давайте рассмотрим основные из них. Различают Inrunner и OutRunner BLDC двигатели. В Inrunner двигателях магниты ротора находятся внутри статора с обмотками, а в OutRunner двигателях магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. То есть в Inrunner (по этому принципу конструируется большинство двигателей постоянного тока) ось внутри двигателя вращается, а оболочка остается неподвижной. А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной. OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.
Примечание: существует еще такой тип BLDC двигателей как бесстержневой (coreless), который находит применение в «карманных» дронах. Эти двигатели работают по несколько иным принципам, но рассмотрение принципов их работы выходит за рамки данной статьи.
BLDC двигатели с датчиками (Sensor) и без датчиков (Sensorless). Для BLDC двигателей, которые вращаются плавно, без рывков, необходима обратная связь. Поэтому контроллер ESC должен знать позиции и полюса магнитов ротора чтобы правильно запитывать статор. Эту информацию можно получить двумя способами: первый из них заключается в размещении датчика Холла внутри двигателя. Датчик Холла будет обнаруживать магнит и передавать информацию об этом в контроллер ESC. Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах. Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС. Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Примеры использования
В DRS
Technologies недавно прошел испытания на полной мощности в 36,5 МВт, 127
об/мин корабельный двигатель для ВМС США, который создавал крутящий
момент более 2700000 Нм. В
Canopy Technologies LLC,
совместном предприятии
DRS и
Elliott Company Inc. (50/50),
которое является ведущим производителем скоростного электропривода,
завершено испытание промышленного двигателя (первое фото) мощностью 11,4
МВт (6225 об/мин). Утверждается, что это два самых мощных двигателя с ПМ
в мире. Большие высокоэффективные двигатели с ПМ находят наилучшее
применение в больших морских судах. Их использование особенно
привлекательно из-за растущей стоимости топлива. DRS также производит
высокоэффективные двигатели с ПМ, которые, как сообщается, достигают
свыше 1,65 кВт/кг в диапазоне мощностей 380-750 кВт.
Среди множества сфер
применения Powertec упоминает новую Advanced Gun System ВМС США для
программы Stealth Destroyer, где используется множество больших
высокодинамичных бесколлекторных двигателей с ПМ. Двигатель поднятия по
высоте, имеющий диаметр всего 30 см, развивает крутящий момент более
1080 Нм при пиковой скорости 2000 об/мин (свыше 220 кВт в пике). По
данным Powertec ВМС рекомендует использование бесколлекторных двигателей
там, где это только возможно — в новых или модернизируемых приложениях —
благодаря их меньшим размерам и массе.
Еще одна сфера
применения включает надежное управление азимутом и углом места
гигантской антенны весом 1800 т, входящей в систему Missile Defense
Antenna. Для обеспечения необходимой мощности и высокой динамики были
поставлены восемь бесколлекторных двигателей мощностью 170 кВт,
управляющие азимутом, и четыре двигателя мощностью 37 кВт, управляющие
углом места. Таким образом, общая мощность двигателей составляла 1500
кВт.
Двигатель с
воздушным охлаждением от Powertec мощностью 300 кВт со станиной NEMA
3213T (40 см в диаметре), показанный ранее — это иллюстрация
компактности этих машин. Вентилятор и распределительная коробка показаны
в пропорции с реальным двигателем. Распределительная коробка кажется
огромной из-за требований NEMA к ее объему при подключении
многочисленных проводов.
Состояние технологии
бесколлекторных двигателей с ПМ представляет собой своего рода
головоломку. Несколько лет назад журнал Control Engineering отмечал, что
по мере роста спроса могли бы производиться все более мощные двигатели.
В журнале был поставлен вопрос: «Если такие двигатели будут созданы,
появятся ли пользователи?» Эд Ли из Powertec формулирует эту мысль таким
образом: «По мере того, как все большее число потребителей захотят иметь
и начнут приобретать эти двигатели, тем большее количество двигателей
более крупных размеров появится на рынке».
( «control
engineering» usa )
Другие сравнения
При сопоставлении коллекторных и асинхронных двигателей одинаковой мощности, вне зависимости от номинальной частоты последних, получается разная характеристика. Далее это будет описано подробнее. Универсальный коллекторный электродвигатель реализует «мягкую» характеристику. В данном случае момент прямо пропорционален нагрузке на валу, при этом обороты обратно пропорциональны ей. Номинальный момент обычно меньше максимального в 3-5 раз. Ограничение оборотов холостого хода характеризуется исключительно потерями в двигателе, при этом при включении мощного агрегата без нагрузки он может разрушиться.
Характеристикой асинхронного двигателя является «вентиляторная», то есть агрегат поддерживает частоту вращения, приближенную к номинальной, увеличивая момент максимально резко при незначительном снижении оборотов. Если речь идет о значительном изменении этого показателя, то момент двигателя не только не растет, но и падает до нулевой отметки, что приводит к полной остановке. Обороты холостого хода немного превышают номинальные, при этом остаются постоянными. Характеристикой однофазного асинхронного двигателя является дополнительный набор проблем, сопряженных с запуском, так как он не развивает пускового момента в нормальных условиях. Магнитное поле однофазного статора, пульсирующее во времени, распадается на два поля с противоположными фазами, из-за чего пуск без всевозможных ухищрений становится невозможным:
Емкость, создающая искусственную фазу;
Расщепленный паз;
Активное сопротивление, формирующее искусственную фазу.
Теоретически поле, вращающееся в противофазе, снижает максимальный КПД однофазного асинхронного агрегата до 50-60% из-за потерь в перенасыщенной магнитной системе и обмотках, нагружаемых токами противополя. Получается, что на одном валу находятся две электрические машины, при этом одна работает в двигательном режиме, а вторая — режиме противовключения. Получается, что электродвигатели однофазные коллекторные не знают конкурентов в соответствующих сетях. Чем и заслужили столь высокую популярность.
Механические характеристики электродвигателя обеспечивает ему определенную сферу использования. Малые обороты, ограниченные частотой сети переменного тока, делают асинхронные агрегаты аналогичной мощности большими по весу и размеру в сравнении с универсальными коллекторными. Однако при включении в цепь питания инвертора с высокой частотой можно добиться соизмеримых размеров и веса. Остается жесткость механической характеристики электродвигателя, к которой добавляются потери на токопреобразование, а также увеличение частоты, повышаются магнитные и индуктивные потери.
Достоинства и недостатки
По сравнению с обычными двигателями БДПТ имеют следующие достоинства:
- большой кпд;
- высокое быстродействие;
- возможность изменения частоты вращения;
- отсутствие искрящих щеток;
- малые шумы, как в звуковом, так и высокочастотном диапазонах;
- надежность;
- способность противостоять перегрузкам по моменту;
- отличное соотношение габаритов и мощности.
Бесколлекторный двигатель отличается большим кпд. Он может достигать 93-95%.
Высокая надежность механической части БД объясняется тем, что в нем используются шарикоподшипники и отсутствуют щетки. Размагничивание постоянных магнитов происходит довольно медленно, особенно, если они выполнены с использованием редкоземельных элементов. При использовании в контроллере защиты по току срок службы этого узла довольно высок. Фактически срок службы БДПТ может определяться сроком службы шарикоподшипников.
Недостатками БДПТ является сложность системы управления и высокая стоимость.
Маркировка безколлекторных моторов
Можно конечно заняться теорией, что 22 это диаметр а 12 и 08 это длина.
А можно ТУПО забить в ЯНДЕКС и буквально по второй ссылке узнать что:
Type: A2212/10 No. Of cells: 2-3 Li-Poly/ 6-10 Ni-Mh/Ni-Cd RPM/V:1400 RMP/V Max. efficiency:78% Max. efficiency current:6-12A (>75%) No load current / 10 V:0,7 A Current capacity:16A/60 s Internal Resistance: 65 mΩ Dimensions:27.5×30 mm Shaft diameter: 3.17 mm Weight:47 g
на примере моторов
Пилотаж DT2213/20 2. 22 — диаметр якоря (диаметр железа, на которое намотаны обмотки) ? 3. 13 — длина якоря (длина сборки железа, на которой намотаны обмотки) ? 4. 20 — кол-во витков. 1022 об/вольт
DT 2213/22 всё то же самое, но больше витков 924 об/вольт
5. Получается, что чем больше витков, тем больше мощность и меньше скорость ?
а у движков Thunder Tiger всё наоборот: 2928/07 -750 об/вольт 2928/09 -920 об/вольт
Магнитная редукция зависит от количества магнитов. меньше витков, больше магнитов?
как правило у движков в одном модельном ряду при одинаковых габаритах по железу и количеству полюсов мощность одинаковая изменяются Кв вращающий момент рабочие токи и рекомендуемое рабочее напряжение (для примера см. таблицу).
теоретически, чем больше витков, тем больше вращающий момент и меньше скорость вращения. Но на практике необходимо учитывать, что для бОльшего числа витков требуется более тонкий провод, который в свою очередь имеет более высокое сопротивление, а значит у двигателя будут более высокие потери на нагрев обмоток. Упрощенно говоря, двигатели с большим числом витков называют низкооборотными, предназначены для вращения винтов большого диаметра и в общем случае требуют более высокого напряжения; двигатели с маленьким числом витков называют высокооборотными, предназначены для вращения винтов меньшего диаметра и могут работать при более низких напряжениях.
Возможно, вам также будет интересно
В этом виде традиционного управления шаговыми двигателями используют устройства обратной связи и методы „без датчиков“ как экономичную альтернативу для некоторых задач управления перемещением с высокими требованиями к безопасности и точности.
Перед инвесторами и руководителями проектов всегда стоит вопрос экономии и оптимизации затрат. Особенно это актуально во время кризиса. Инвестор, вкладывая свои средства в строительство логистического комплекса, хочет разместить больший объем хранения на меньшей площади. А руководитель, которого интересуют способы модернизации производства, задумывается о том, как правильно распорядиться бюджет…
Первый TeleMultiMedia Forum на выставке «Связь-2017»
9 апреля, 2017Одним из заметных событий деловой программы международной выставки информационных и коммуникационных технологий «Связь-2017», которая состоится в столичном ЦВК «Экспоцентр» 25–28 апреля, станет первый международный «TeleMultiMedia Forum 2017: настоящее и будущее медиапотребления в России и мире». Он посвящен важнейшим аспектам развития российской отрасли цифрового ТВ в контексте трансформации современных моделей медиапотребления, а также популяризации новых технологий и медиаформатов.
В работе форума 27 апреля примут участие представители российских и зарубежных телекоммуникационных и …
Преимущества[править]
(перед коллекторными моторами)
- Бесколлекторные двигатели эффективно работают в более широком диапазоне оборотов и имеют более высокий КПД. Конструкция двигателя при этом проще, в ней нет щеточного узла (который работает постоянно в режиме трения, создает искры и в итоге потерю энергии)
- Бесколлекторные моторы практически не изнашиваются, поэтому отсутствует необходимость в техническом обслуживании (кроме случаев выхода из строя подшипников).
- Большинство бесколлекторных моторов не боятся влаги (могут работать полностью погружёнными под воду) при условии изоляции фазовых проводов, катушки электромагнита намотаны изолированным проводом по умолчанию. Но следует иметь в виду, что при длительной работе в воде неизбежно вымывается смазка из подшипников и они могут закиснуть, заржаветь.
- Возможность использования в воспламеняемой, взрывоопасной и агрессивной среде (из-за отсутствия искр).
- Большая перегрузочная способность по моменту.
- Высокие энергетические показатели (КПД более 90 %)
- Генерация более низкого уровня акустического и электрического шума по сравнению с универсальными коллекторными двигателями постоянного тока.
- Хорошее соотношение массогабаритных характеристик и мощности
Принцип работы
Вентильный бесколлекторный двигатель ВМЭД, ДВУ является одним из видов электрического двигателя, который индуцирует непостоянные магнитные полюса на ферромагнитном роторе. Крутящий момент создается за счет магнитного сопротивления.
Фото – Бесколлекторный вентильный двигатель
Вентильные двигатели бывают трех типов:
- Синхронный;
- Асинхронный;
- Индукторный.
Конструкция вентильно-реактивного двигателя (ВРД) включает в себя две фазные обмотки, установленные вокруг диаметрально противоположных полюсов статора. При подаче питания ротор движется в соответствии с полюсами статора, благодаря чему, сопротивление магнитного поля сводится к минимуму. В основе работы вентильно индукторного двигателя используется тот же принцип.
Фото – Вентильный двигатель
В высокоэффективной переменной скорости привода магнетизм двигателя оптимизирован для работы с реверсом. Информация о положении ротора используется для управления фазы подачи напряжения. Благодаря этому обеспечивается непрерывный крутящий момент и высокая эффективность. Сигналы накладываются на угловую ненасыщенную фазу индуктивности, при этом ее максимальная величина соответствует минимальному сопротивлению полюса. Положительный момент производится только при углах, когда индуктивность градиента также является положительной.
Для защиты электроники от высоких вольт-секунд фазный ток на низких скоростях необходимо ограничивать. Как правило, это достигается за счет гистерезиса тока. Для контроля процесса используются специальные датчики.
Фото – Схема вентильного двигателя
На более высоких скоростях ток ограничен. Чтобы оптимизировать производительность, управляющее напряжение одиночного импульса используют с заранее выровненным углом.
Траектория реактивной энергии наглядно иллюстрирует механизм ее преобразования. Мощностная область представляет собой питание, которое преобразуется в механическую энергию (или она уже была преобразована генератором). При резком отключении питания остаточная или избыточная энергия возвращается к статору. Минимальное влияние магнитного поля на работу двигателя является его основным отличием от аналогичных устройств.
Преимущества вентильного двигателя:
- Благодаря небольшому магнитному сопротивлению минимизируются потери энергии;
- Высокие показатели безопасности (возможность работы при пиковых нагрузках);
- Широкий диапазон скоростей;
- Мягкое переключение скоростей.
К числу недостатков автоматизированных вентильных электродвигателей можно причислить:
- Высокий уровень шума;
- Сложно управление;
- Относительно высокая стоимость, по сравнению с аналогичными устройствами.
Видео: из чего состоят вентильные двигатели
Заключение
Итак, подведем итоги и обозначим в чем разница между коллекторным и бесколлекторным двигателем, перечислив их особенности.
Коллекторный двигатель:
- Есть щетки и коллектор, которые искрят и изнашиваются.
- Нужно чаще обслуживать, соответственно и срок службы не слишком долгий.
- Легко регулировать скорость лишь изменением напряжения.
- Для реверса нужно просто сменить полярность.
- Два предыдущих факта позволяют их использовать в бюджетных устройствах без сложных электросхем.
Бесколлекторный двигатель:
Для запуска нужен контроллер, который хоть и не слишком дорого стоит, но увеличивает конечную стоимость, схемотехнику и вес изделия.
Весят меньше чем коллекторные, при одинаковой мощности (но это частично компенсируется предыдущим фактом).
Нет щеток и коллектора, поэтому не требуют обслуживания, не искрят.
Больший срок службы, он ограничен лишь ресурсом подшипников ротора.
Стоят обычно дороже чем коллекторные.
Зачастую выдают больший момент на валу и обороты.
При наличии датчиков положения вала обеспечивают большую стабильность оборотов при изменении нагрузки (жесткая механическая характеристика)
Это особенно важно при использовании на станках и ручном инструменте.. От автора:. От автора:
От автора:
Добавлю то, что нельзя однозначно сказать какой лучше или какой мощнее, можно найти коллекторный двигатель размером с холодильник, а можно бесколлекторный размером с ноготь. При этом оба будут отлично выполнять те функции, на которые рассчитаны и использоваться в конкретных устройствах с учетом требований к их надежности и особенностям эксплуатации. Каждый вид электропривода хорош по своему и идеален по конструкции как таковой.
Теперь вы знаете, в чем разница между коллекторным и бесколлекоторным двигателем, а также какие плюсы и минусы у каждого варианта исполнения. Надеемся, предоставленная информация была для вас полезной и интересной!
Материалы по теме:
- Чем отличается трансформатор от автотрансформатора
- Разница между контактором и пускателем
- Что лучше поставить: дифавтомат или УЗО
Опубликовано:
05.07.2019
Обновлено: 05.07.2019
Похожие записи:
 Сколько в ампере ватт, как перевести амперы в ватты и киловатты
Сколько в ампере ватт, как перевести амперы в ватты и киловатты
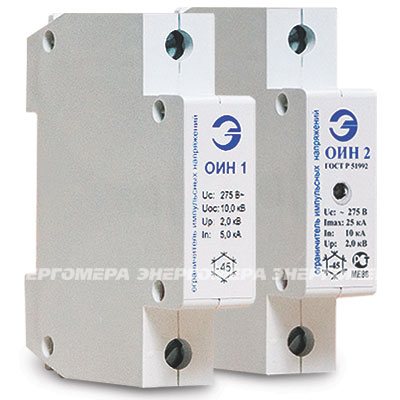 Устройство защиты от импульсных перенапряжений (узип) для частного дома
Устройство защиты от импульсных перенапряжений (узип) для частного дома
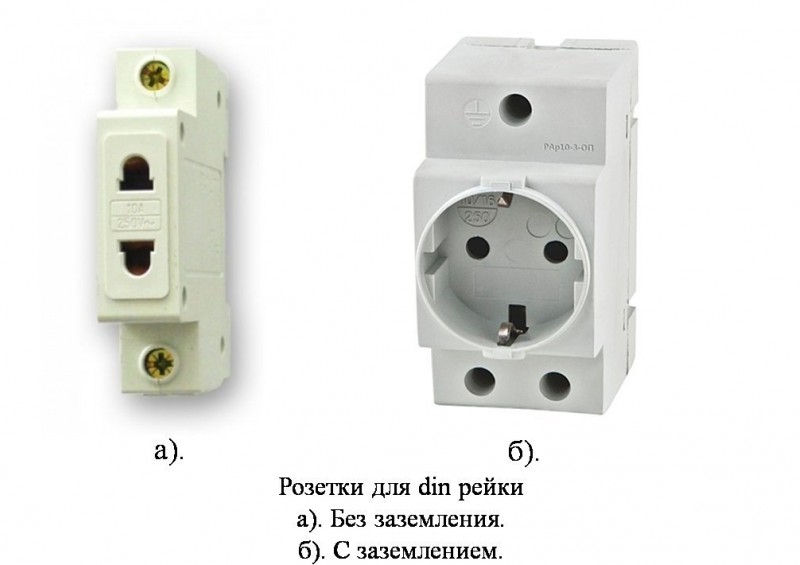 Din-рейки. виды и особенности. применение и монтаж
Din-рейки. виды и особенности. применение и монтаж
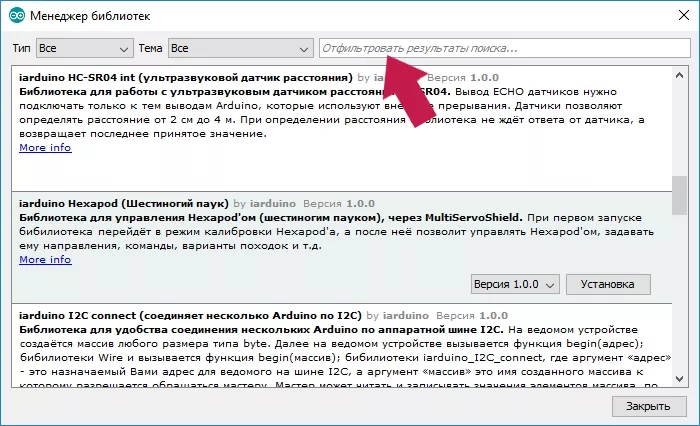 Библиотека wire для arduino для работы с шиной i2c. копаем глубже
Библиотека wire для arduino для работы с шиной i2c. копаем глубже
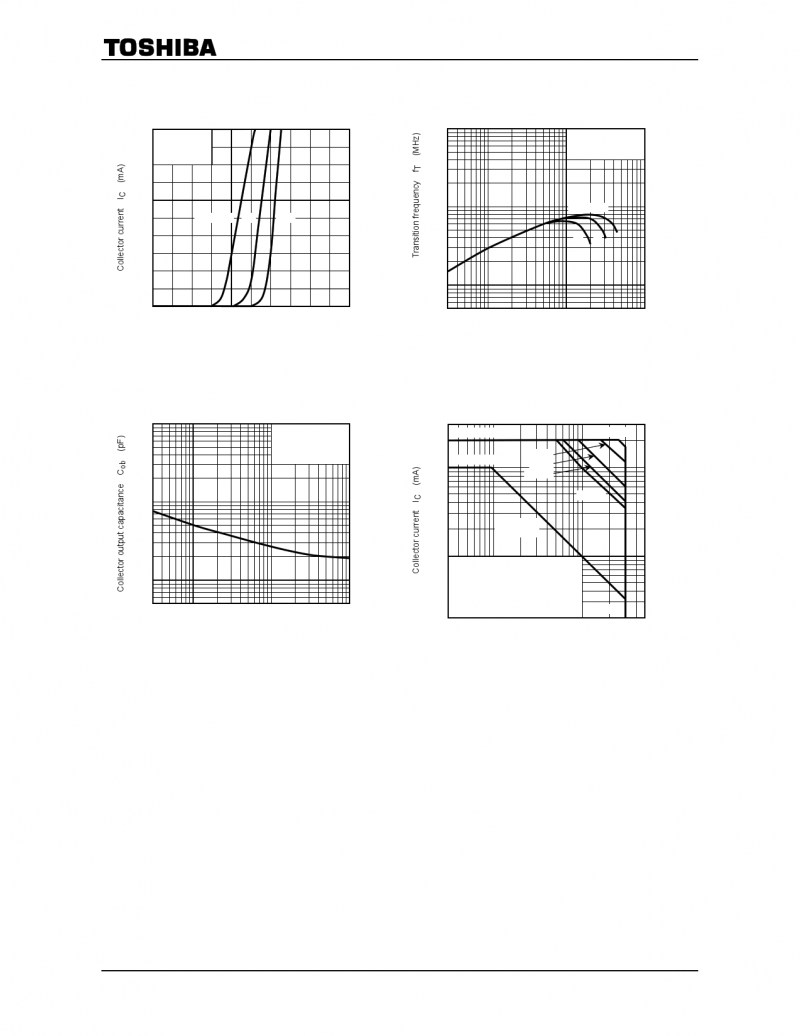 Транзистор c3198
Транзистор c3198
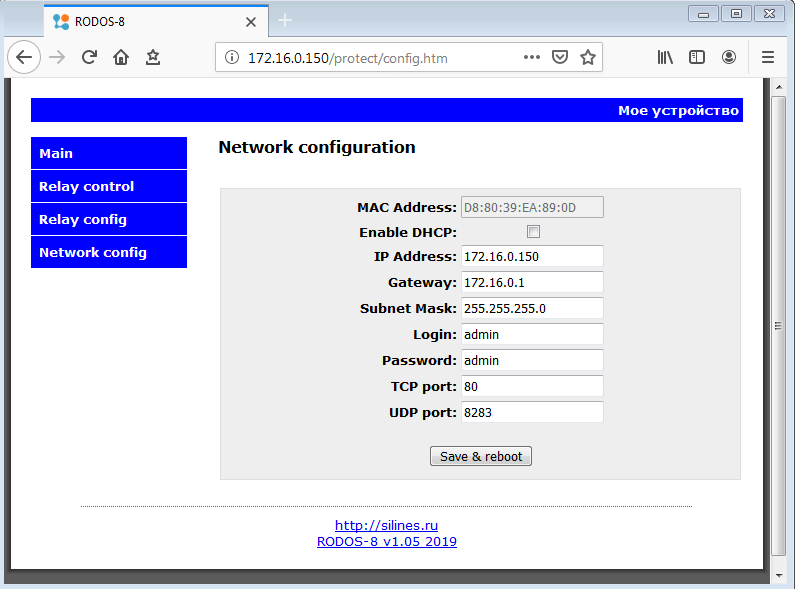 Управление реле с помощью web интерфейса на ардуино
Управление реле с помощью web интерфейса на ардуино