Пример
Допустим, в нашем распоряжении генератор с показателями мощности в 3 кВА и cos φ, равным 0,8. В таком случае номинальная мощность данной установки будет равна:
3 кВА х 0,8=2,4 (кВт)
Теперь можно понять, почему мощность может указываться в тех или иных единицах измерения, в ваттах (Вт) или Вольт Амперах (ВА). Некоторые производители, чтобы избавить потребителя от необходимости проведения вычислений, просто указывают в сопроводительной документации оба значения мощности – номинальной и максимальной. Встречаются также варианты, когда производителем указывается только одна из мощностей и приводится значение коэффициента мощности. Некоторые недобросовестные компании могут скрывать коэффициент мощности от потребителя. Это делается с целью выдать генератор за более мощную, чем на самом деле, установку.
Что такое номинальная мощность?
С термином «номинальная мощность» мы сталкиваемся практически ежедневно. Выбираем ли электрический чайник или лампу накаливания – везде указано это значение. Единицей измерения являются ватты или киловатты. Казалось бы – что может быть проще в этом вопросе? Ведь еще со школьного курса физики всем известно, что для определения мощности (P) достаточно перемножить значения тока и напряжения. Но что скрывается за словами « номинальная мощность »? Под термином «номинальный» понимают определенное значение чего-либо, не учитывающее внешних корректирующих факторов. Таким образом, номинальная мощность – указанное производителем значение, которое может быть получено только при предусмотренных расчетных параметрах. Это общее понятие. В каждом же конкретном случае необходимо учитывать свои специфичные особенности. Приведем пример с лампой накаливания. На ее стеклянной колбе отмечено: 230 В, 100 Вт. То есть, 100 Вт может быть достигнуто только при напряжении в 230 В. Номинальная мощность – это те самые 100 Вт. Ее значение уменьшается со снижением напряжения и увеличивается с повышением так как эти параметры находятся в прямой зависимости друг от друга (P=I*U).
Как правило, для большинства электроприборов есть ограничение по верхней границе, обычно 5-10%. Другими словами, допустима работа при 230 В + 23 В = 253 В. Нижний предел может не указываться, как в случае с лампой. Более сложное оборудование ограничено по паспортным параметрам как сверху, так и снизу. К примеру, как понять термин «номинальная мощность двигателя»? Существует два равноправных определения – одно с точки зрения электричества, а другое исходя из расчетной механической нагрузки на валу. Хотя они непосредственно взаимосвязаны, второе более простое для понимания. Мы приведем оба. На табличке с паспортными данными всегда указано значение мощности. Она численно равна потребляемой из электрической сети при расчетной механической нагрузке, причем температура корпуса должна находиться в допустимых пределах (подразумевается продолжительный режим работы). То есть, можно считать, что паспортное значение равно номинальному. Если же электропривод работает в повторно-кратковременном режиме (ПВ не равно 100%), то такое соответствие не выполняется, так как времени работы недостаточно для перехода в установившийся режим, когда увеличение нагрева компенсируется температурой окружающего воздуха. В этом случае потребуется нагрузочный график: номинальная мощность будет равна произведению паспортного значения P и корня квадратного из подобранного по графику коэффициента. Все вышесказанное верно для электрической составляющей.
Согласно другому определению, номинальная мощность принимается равной механической, развиваемой двигателем при расчетном значении напряжения и температурном режиме, соответствующем паспортному. Таким образом, если напряжение (U) уменьшается, то изменяется и момент силы, хотя скорость вращения вала может остаться прежней. Как было сказано, производителем закладывается в изделие определенный «запас прочности»: колебания U в пределах +-5% позволяет двигателю развивать расчетный момент (при неизменности частоты сети). Для частоты такой запас составляет всего 2,5%. А вот номинальная мощность трансформатора учитывает только температурный режим. Если посмотреть в паспорт устройства, то там указаны две температуры: номинальная и окружающего воздуха. Если при работе первая не превышает своего расчетного значения, а вторая отличается от паспортных данных незначительно, то в этом режиме трансформатор выдает номинальную мощность. Любое повышение электрической нагрузки вызывает рост тока и температуры, поэтому вполне достаточно контроля последней. Как и в случае с двигателями, допускается небольшое превышение.
Учет вида нагрузки
Для бытовых электроприборов характерны два вида нагрузки:
Активная (омическая) нагрузка потребляется приборами, которые преобразуют получаемую энергию в тепло. Это электрическая плита, утюг, фен, калориферы и т.д. Реактивную нагрузку потребляют остальные электроприборы, преобразующие в тепло только незначительную часть энергии. Основная часть потребляемой энергии используется с другой целью. Примерами таких приборов могут быть холодильник, пылесос, телевизор, компьютер и т.д.
Если вам нужна помощь в выборе мощности генератора для вашего дома, производственного цеха или любого другого объекта, обратитесь за квалифицированной консультацией к нашим специалистам.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Номинальный момент — двигатель
Момент механического торможения не должен превышать двукратного номинального момента двигателя. Ток при максимальной скорости вращения не должен превышать, 0 7 номинального для тихоходных и 1 6 для быстроходных двигателей.
Сравнивают полученное значение М эк с номинальным моментом двигателя Мнок.
|
Механические характеристики электроприводов механизмов подъема с магнитными контроллерами КС и ТСА. Характеристики реализуются при следующих значениях ступеней резисторов ( в процентах номинального сопротивления двигателя. Р1 — Р4 — 5. Р4 — Р7 — 10. Р7 — Р10 — 20. Р10 — Р13 — 27. Р13 — Р16 — 76. Р16 — Р19 — 72 и при параллельно включенных роторных резисторах — Р1 — Р4 — 14. Р4 — РЮ — 39. Р10 — Р16 — 86. Р16 — Р19 — 72. Р1 — Р7 — 23. P7 — P13 — Q2. Данные указаны на одну фазу. |
В характеристиках за 100 % момента принят номинальный момент двигателей MTF, МТН в режиме ПВ 40 %, за 100 % скорости — синхронная скорость двигателя. Для контроллеров К 63 и ТА 161 на малые мощности двигателей характеристика 4а соответствует последнему, фиксированному положению контроллера. Механические характеристики ( так же как и при управлении силовыми кулачковыми контроллерами ККТ 60А) рассчитаны из условий обеспечения необходимых параметров ускорения привода при пуске и торможении в режиме противовключения. Для обеспечения нормального пуска в схемах всех магнитных контроллеров предусматриваются невыключаемые ступени резисторов в цепи ротора.
|
Зависимость коэффициента динамичности от параметров электропривода и механизма. |
Таким образом, перегрузка, отнесенная к номинальному моменту двигателя, падает вдоль кинематической оси тем быстрее, чем меньше загрузка механизма. Перегрузка растет с увеличением момента, развиваемого двигателем, и зависит от распределения приведенных маховых масс по звеньям механизмов. В тех случаях, когда приняты значительные рабочие скорости, массы перемещаемого груза и тележки играют существенную роль в общем балансе кинематической энергии, и уменьшение кратности перегрузки момента вдоль кинематической оси незначительно, поэтому опасность поломки при пуске будет не только на первой зубчатой передаче, но и на последующих. При малых рабочих скоростях и больших передаточных отношениях влияние перемещаемого груза и тележки по сравнению с моментом инерции ротора незначительно.
Скольжение выбираемого двигателя при нагрузке, равной номинальному моменту заменяемого двигателя, должно быть е меньше номинального скольжения заменяемого двигателя.
При использовании двигателей с самовентиляцией допустимый по нагреву номинальный момент двигателя снижается по мере уменьшения скорости вниз от номинальной. Это снижение обычно указывается в каталогах и заводских информационных материалах. Для двигателей серий П и 2П это снижение может быть принято равным 20 % при уменьшении номинальной скорости до 0 5 ном. Для закрытых двигателей серий ПБСТ и 2ПБ номинальный момент остается постоянным при всех скоростях.
|
Устройство большого и малого клапанов механизма ножиой педали гидравлического тормоза. |
Расчетный тормозной момент принят равным 1 5 от номинального момента двигателя: Мт 1 5МН 150 кгм.
Расчетный тормозной момент принят равным 1 5 от номинального момента двигателя.
Если рассматривать влияние увеличения скольжения на кривую зависимости потребного номинального момента двигателя, то можно констатировать, что при увеличении номинального скольжения: а) точка идеального безмаховикового привода сохранит свое положение; б) точно та.
Таким образом, определяют / всего электропривода при принятом номинальном моменте двигателя Мв и скольжении SH, если пиковый момент двигателя равен Afmax. Затем по (6.13) для среднеквадратичного тока двигатель проверяют на нагревание.
Тм — электромеханическая постоянная времени электропривода; М — номинальный момент двигателя.
Независимо от типа ВОМ его элементы рассчитываются на передачу номинального момента двигателя. При конструировании ВОМ в соответствии с ГОСТ 3480 — 58 необходимо обеспечить условие: при работе двигателя на номинальном числе оборотов число оборотов ВОМ ( кроме синхронных) должно быть 540 10 в минуту, а направление вращения — по часовой стрелке, если смотреть по движению трактора.
Как определить мощность асинхронного электродвигателя.
Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько
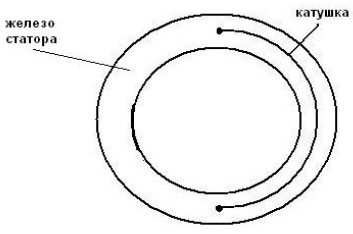
Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.
Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор. Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой. И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min (2p) 4 1500 r/min (2p) 6 1000 r/min (2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.

Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”

“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / ми Разрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболее Точность: + / – 0,05% Рабочее расстояние: 50mm ~ 500mm Также указывается малое и наибольшее значение Для тех кому реально необходимо – просто супер вещь! Л. Рыженков
Номинальный, максимальный и пусковой момент асинхронного двигателя. Формула Клосса
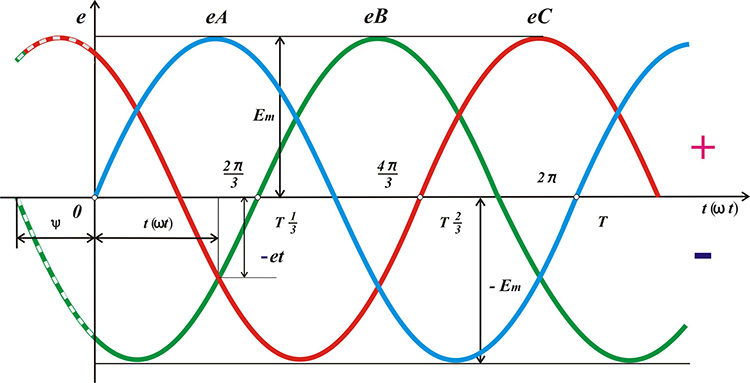
Трехфазный асинхронный двигатель с короткозамкнутым ротором, устройство и принцип действия.
Потери напряжения и мощности в трехфазной линии.
Ток нейтрального провода в трехфазной цепи является суммой фазных токов. При симметричной нагрузке сумма фазных токов равняется нулю. Таким образом, при симметричной нагрузке отсутствуют потери в нейтральном проводе. Потери напряжения и мощности в линии при трехфазном подключении в шесть раз меньше, чем при однофазном подключении потребителей такой же мощности.
При несимметричной нагрузке нейтральный провод необходим, по нему должен проходить выравнивающий ток. При несимметрии фазных токов появляется ток в нейтральном проводе. Если попытаться включить несимметричную нагрузку без нейтрального провода, получится перекос фаз, при котором на нагруженных фазах напряжение понизится, а на разгруженных появляется перенапряжение. Снижение напряжения нарушает работу потребителей, а перенапряжение может вывести из строя.
Потери энергии в нейтральном проводе снижают коэффициент полезного действия линии и ухудшается качество электроснабжения. Поэтому с целью получения симметричной нагрузки однофазные потребители стараются равномерно распределять по фазам.
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре – размещается трехфазная обмотка, питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Собранный сердечник статора укрепляют в чугунном корпусе двигателя. Вращающуюся часть двигателя – ротор – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам.
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал вращается в подшипниках, закрепленных в подшипниковых щитах. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Крутящий момент редукторов
Крутящий момент редуктора является одним из важнейших параметров устройства. Именно этот показатель позволяет увеличить характеристики принимающего устройства и достичь нужной мощности. Разберемся, как меняется значение в зависимости от вида механизма и как правильно рассчитать требуемые параметры.
Крутящий момент с учетом вида редуктора

Допустимые значения определяются различными факторами. Например, в устройствах одного типоразмера цифра зависит от разности диаметров. В червячных моделях радиус колеса и червяка почти всегда неизменны, поэтому сила воздействия создается за счет количества зубьев.
По типу передачи различают следующие разновидности редукторов:
- цилиндрические (одноступенчатые и многоступенчатые);
- конические;
- червячные;
- планетарные.
Все перечисленные разновидности относятся к числу однотипных. Однако кроме них существуют и комбинированные механизмы, в которых вращение передается между двумя валами, перекрещивающимися или пересекающимися между собой.
Как правило, более высокий номинальный крутящий момент у редукторов планетарного типа. Цилиндрические механизмы, которые востребованы в промышленности, также передают повышенные мощности. Простые по конструкции червячные устройства имеют более низкий КПД, что связано с большими потерями на трение. Последняя разновидность – конические устройства – имеют достаточно плавное зацепление и передают большую мощность под углом 90 градусов.
Еще один показатель, который может повлиять на вращающий момент, – это количество ступеней. Для повышения передаваемой мощности число ступеней может увеличиваться. В цилиндрических редукторах для увеличения показателя применяются шестерни разных диаметров. В червячных устройствах на шестерне изменяется количество зубцов.
Расчет крутящего момента редуктора являются одной из наиболее сложных процедур для выбора механизма. Этот показатель косвенно отражает способность привода выдержать определенные нагрузки. Ошибки при определении величины могут привести к преждевременному выходу оборудования из строя. Также возможны и менее критичные проблемы вроде постоянного перегрева и сложностей с установкой. Поэтому перед выбором механизма необходим тщательный анализ имеющихся факторов и применение специальной формулы.
Формула расчета
Стоит отметить, что различают несколько видов вращающего момента:
M2 – показатель на выходном валу.
Mn2 – номинальный показатель, характеризующий ту мощность, которую может передавать механизм.
Mr2 – требуемый момент, которые обычно равняется номинальному.
M2max – максимальный показатель, который передается в момент ускорения.
Mc2 – расчетная мощность, которая рассчитывается с учетом необходимого и номинального момента, а также сервис-фактора (Sf).
Для расчета максимально возможного крутящего момента используется формула следующего типа:
Р – мощность двигателя (измеряется в кВт);
N – показатель КПД (в среднем составляет от 0,94 до 0,98);
U – передаточное число;
nвх – обороты входного вала (за 1 минуту);
К – коэффициент, который определяется с учетом режима использования редуктора.
При расчетах важно учесть, что получаемый показатель не должен быть больше того, что указывается в технических параметрах механизма. Что касается крутящего момента, определяемого на выходе редуктора (M2), то этот показатель можно получить, умножив номинальный параметр (Mn2) на передаточное число устройства
Что касается крутящего момента, определяемого на выходе редуктора (M2), то этот показатель можно получить, умножив номинальный параметр (Mn2) на передаточное число устройства.
Надеемся, что вы разобрались с правилами определения вращающего момента редуктора и сможете самостоятельно рассчитать этот показатель. А если у вас возникнут сложности, то специалисты нашей компании «Ф и Ф» обязательно помогут выбрать механизм с учетом имеющихся потребностей!
Мощность вращающихся объектов
Для расчета подобной системы применяют формулу:
N = M * w = (2π * M* n)/60,
где:
- M – момент силы;
- w – угловая скорость, характеризующая вращение;
- n – количество оборотов, которое совершает двигатель или другое устройство за 60 секунд.
Приведенные сведения используют с учетом целевого назначения и реальных условий. Так, в термодинамике необходимо помнить о зависимости эффективности системы от температуры окружающей среды. Тепловые потери нагревателя оценивают по соответствующей мощности на единицу площади поверхности. Аналогичным образом поступают при решении механических задач для расчета тяги, КПД, иных рабочих параметров. Как правило, приходится специальным коэффициентом компенсировать трение.
В электрических цепях ток ограничивает сопротивление проводника. Для небольших расстояний при малой мощности тщательные расчеты не нужны. Однако проект магистральной трассы обязательно содержит соответствующие вычисления. На основе полученных результатов делают выводы о среднегодовых экономических показателях. Следует помнить о необходимости учета искажений, которые добавляют при работе с переменным напряжением реактивные нагрузки.
Похожие записи:
 Мощность переменного тока — понятие, виды и формулы
Мощность переменного тока — понятие, виды и формулы
 Виды и размеры кабель канала: пластиковый короб для наружной и внутренней проводки
Виды и размеры кабель канала: пластиковый короб для наружной и внутренней проводки
 Сколько ватт в киловатте?
Сколько ватт в киловатте?
 Классификация нейтралей в сетях и электроустановках
Классификация нейтралей в сетях и электроустановках
 Проекты ардуино для начинающих
Проекты ардуино для начинающих
 Как восстановить гаджет после глубокого разряда аккумулятора
Как восстановить гаджет после глубокого разряда аккумулятора