Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин-1
Начальный пусковой момент – момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение – значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (), Вт
При этом
потери в электродвигатели обусловлены:
электрическими потерями – в виде тепла в результате нагрева проводников с током;
магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m – масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Конструкция
Конструкция асинхронного двигателя, пожалуй, самая простая среди его аналогов. Он состоит из ротора и статора. Зачастую на статоре расположена трёхфазная обмотка, исключение составляют двигатели, предназначенные для работы в однофазной сети с двухфазной обмоткой или с рабочей и пусковой обмоткой. Статор состоит из металлического корпуса и сердечника с обмотками (собственно их называют обмоткой статора).
Так как двигатель питается переменным током, возникает проблема, связанная с потерями на блуждающие токи (т.н. токи Фуко), для этого сердечник статора набирают из тонких пластин. Стальные пластины для предотвращения контакта друг с другом изолируются окалиной, скрепляются лаком. Ток, протекающий в обмотках статора, называют током статора.
Корпус статора закрывается с двух сторон подшипниковыми щитами, в них, соответственно, устанавливаются подшипники скольжения или качения, в зависимости от мощности и размеров машины. Подшипники закрываются крышками, это нужно для их смазки, обычно используют пластичную смазку, как литол, солидол и подобные.
Реже, в больших и мощных электрических машинах могут использоваться опорные подшипники скольжения с циркуляционной системой смазки (жидкостная смазка). В них маслонасос закачивает масло, в рабочем режиме ротор таких машин скользит по тонкой масляной плёнке, подобно тому, как это происходит во вкладышах на ДВС.
По конструкции корпуса и типу крепления различают двигатели на лампах или с фланцевым креплением, также бывают с комбинированным типом крепления — с лапами и фланцем.
В зависимости от типа двигателя вал из него может выходить как с одной, так и с обеих сторон. К нему присоединяется исполнительный механизм, для этого конец выполняется конической или цилиндрической формы или с проточкой для установки шпонки и соединения с исполнительным механизмом.
В большинстве электродвигателей используется принудительное воздушное охлаждения. Для этого на корпусе продольно располагаются рёбра, а на другом конце вала устанавливается крыльчатка вентилятора охлаждения. Во время работы двигателя она вращается и прогоняет воздух вдоль рёбер, забирая тепло от статора.
Подключить двигатель к однофазной цепи
Изготовленный для работы от трёхфазного источника питания электромотор может работать и от домашней однофазной сети, но при этом существенно снизятся его характеристики, такие как КПД, коэффициент мощности. Кроме того, снизятся мощность и пусковые показатели.
Если же без подключения не обойтись, то требуется из трёх обмоток статора собрать схему, где их будет только две. Одна рабочая, а другая пусковая. Например, есть три катушки с началами С1, С2, С3 и концами С4, С5, С6 соответственно. Для создания первой (рабочей) обмотки двигателя объединяем концы С5 и С6, а их начала С3 и С2 подключаем к источнику однофазного тока, например, бытовой сети 220 вольт. Роль второй, пусковой обмотки, будет выполнять оставшаяся незадействованная катушка стартера. Она подключается к источнику питания через конденсатор, соединённый с ней последовательно.
Схема соединения обмоток статора
Так как в статоре односкоростного асинхронного двигателя расположено три обмотки, то для подключения к трёхфазной сети их необходимо как-то соединить. Как и в любой трёхфазной цепи различают две схемы соединения:
1. «Звезда». Концы обмоток соединяются вместе, напряжение подводится к их началам.
2. «Треугольник». Начало следующей обмотки соединяется с концом предыдущей.
Концы обмоток выводятся в клеммную коробку, которую еще называют «брно» или «борно» (мне не удалось найти правильного названия, а в словаре указаны оба варианта). В зависимости от типа и конструкции двигателя в «борно» может быть выведено 3 или 6 проводов. Если выведено 3 провода – то обмотки соединены «с завода» по определенной схеме, а если 6, то вы можете выбрать схему подключения исходя из напряжения питающей сети.
В зависимости от года производства и производителя электродвигателя могут применяться такие обозначения выводов обмоток, как приведены в таблице ниже.
Концы обмоток на клеммнике расположены таким образом, чтобы с помощью одного комплекта из трёх перемычек можно было соединить обмотки по нужной схеме. Для соединения по схеме звезды перемычки устанавливают в ряд на концы обмоток, а для треугольника – параллельно друг другу соединяя «верхние» и «нижние» клеммы. Для этого начала и концы обмоток смещены друг относительно друга, что вы увидите на следующей иллюстрации.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.

Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).
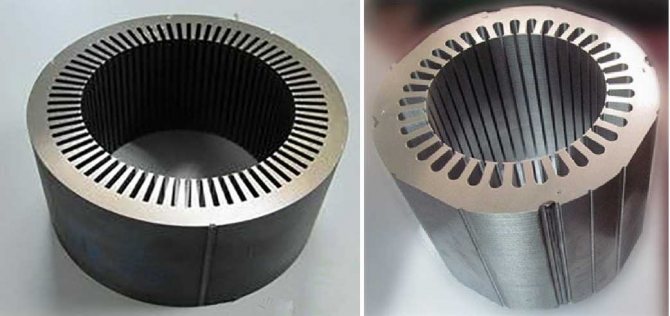
Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
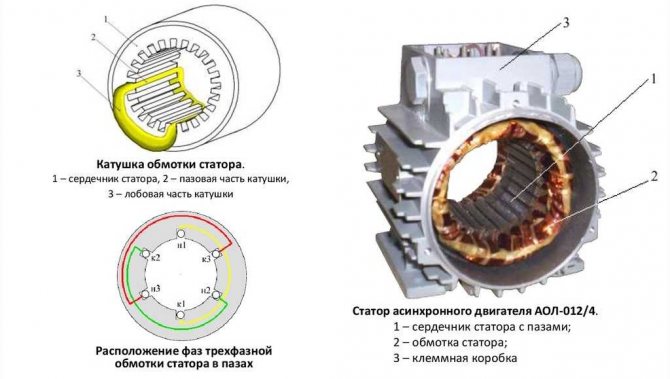
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Принцип работы
В основе АД лежит вращение поля магнитов. В область обмотки трёхфазного статора поступает ток, а в фазах возникает поток магнитов, изменяемый в зависимости от скорости и частоты постоянной электрической мощности. При статорном вращении возникает электродвижущая сила.
В роторную обмотку подходит напряжение, которое совместно с постоянным магнитным потоком статора образует пуск. Он стремится направить ротор по магнитному вращению статора и при достижении превышения момента торможения, приводит к скольжению. Оно выражает отношение между частотами статорного силового поля магнитов и скоростью роторного вращения.
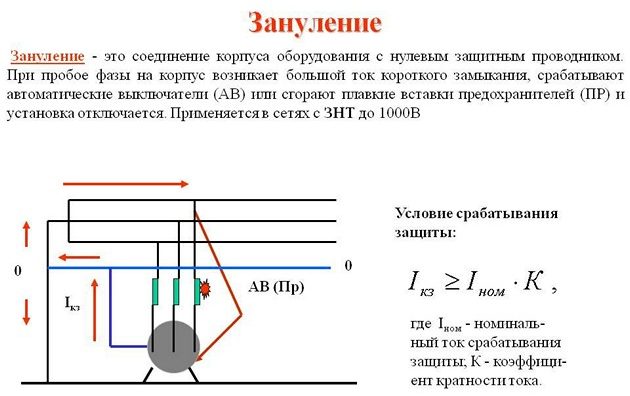
Чертеж режима кз
При балансе между моментами электромагнита и торможения, перемена значений остановится. Особенность эксплуатации АД – сольватация кругового движения силового поля статора и им наводящих токов в роторе. Момент вращения возникает лишь при разнице частот круговых движений магнитных полей.
Машины различают синхронные, асинхронные. Разница механизмов в их обмотке. Она образует магнитное поле.
Неподвижность ротора и замыкание обмотки приводит к короткому замыканию (кз).
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Что происходит в обмотке статора
Каждая фаза сети питания подключается к соответствующей катушке статора, поэтому возникающее вокруг них магнитное поле будет смещено на 120˚. Источник питания имеет переменное напряжение, следовательно, вокруг катушек статора, которыми располагает асинхронный двигатель, будет возникать переменное магнитное поле. Схема асинхронного двигателя собирается так, чтобы магнитное поле, возникающее вокруг катушек статора, постепенно изменялось и последовательно переходило от одной обмотки к другой. Таким образом создаётся эффект вращающегося магнитного поля. Можно вычислить его частоту вращения. Измеряться она будет в оборотах за минуту. Определяется по формуле: n=60f/p, где f — это частота переменного тока в подключенной сети (Гц), p — соответствует числу пар полюсов, смонтированных на статоре.
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы
Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль)
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А
Полная потребляемая мощность:
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
Обозначение выводов обмоток статора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | ||
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 |
Виды двигателей
Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм. Мотор может быть:
- однофазным,
- двухфазным,
- трехфазным.
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках. В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
Предлагаем Вашему вниманию познавательную статью о параллельном и последовательном соединении резисторов.
Технические параметры
Асинхронная машина обладает следующими техническими характеристиками:
- габариты и мощность. Они должны равняться приведенным в техрегламенте;
- степень защиты. При эксплуатации в разных условиях требуется различный уровень защиты. Машина может работать на улице или в помещениях, в зависимости от этого требуется определенный уровень защиты;
- хорошая степень изоляции. Нужно, чтобы мотор был устойчив нагреванию;
- вид. Существуют различные типы асинхронных машин, предназначенные для эксплуатации в экстремальных погодных условиях, при очень низких или высоких температурах (в холодной местности на севере или на жаркой территории на юге). Необходимо, чтобы устройство двигателя соответствовало окружающим условиям;
- абсолютное соответствие режимам работы (на практике и в теории);
- система охлаждения, работающая согласно конкретному режиму;
- громкость работы при холостом включении не должна превышать второй класс.
Виды электромеханических устройств
Статор — понятие и принцип действия
Используют ротор в таких электромеханических устройствах, как двигатели, работающие на постоянном и переменном электрическом токе, генераторы.
Агрегаты, работающие на переменном токе
К таким агрегатам относятся различные электродвигатели. Наиболее распространенная модель данного устройства состоит из следующих частей:
- Алюминиевый или чугунный ребристый корпус с монтажной коробкой для подключения обмоток статора и ротора;
- Статор – неподвижная часть в виде полого цилиндра, расположенная внутри корпуса. Обмотка статора состоит из 3 пар расположенных друг напротив друга намотанных в пазы корпуса катушек из медного изолированного провода
- Цельнометаллический цилиндрический ротор с валом и пазами, в которые впаяны обладающие высокой токопроводящей способностью алюминиевые стержни.
Двигатель, запитываемый от переменного тока
Вращается ротор на двух опорных подшипниках, запрессованных на его валу. Охлаждение работающего на больших оборотах электродвигателя происходит, благодаря крыльчатке – небольшому вентилятору, состоящему из множества лопастей и расположенному на одном из концов вала ротора. Также эффективному охлаждению работающего агрегата способствует ребристая структура алюминиевого корпуса.
Принцип работы подобного двигателя заключается в следующем:
- При подключении тока к агрегату он попеременно проходит через одну из трех пар катушек статора.
- При протекании по парам статорных катушек электрического тока они создают магнитное поле, силовые линии которого пересекают ротор.
- Попеременно запитываемые пары катушек создают подвижное магнитное поле, которое по закону электромагнитной индукции провоцирует появление в неподвижных металлических стержнях ротора электрического тока.
- Индуцированный ток в роторе приводит к появлению силы, выталкивающей его из магнитного поля статора. Так как частота подачи тока на катушки статора в среднем составляет порядка 30 импульсов в секунду, появившаяся в роторе выталкивающая сила приводит к его вращению с большой скоростью.
Важно! В зависимости от одновременности вращения ротора и порождающего это движение магнитного поля электрический двигатель переменного тока может быть синхронный (ротор агрегата вращается синхронно с магнитным полем статора) и асинхронный (вращение якоря не синхронизировано с движением магнитного поля статора). Первый вид отличается высокой мощностью и надежностью, в то время как второй характеризуется большим разнообразием конструкций и областей применения
Машины постоянного тока
Наиболее распространенный электродвигатель постоянного тока щеточного вида представляет собой электрический агрегат, состоящий из:
- Чугунного корпуса с ребрами охлаждения и специальным монтажным коробом для подключения обмоток агрегата;
- Вала из прочной инструментальной стали с двумя подшипниками;
- Якоря, состоящего из сердечника (набора пластин из специальной электротехнической стали), якорной обмотки (размещенных в пазах сердечника катушек из медного провода);
- Индуктора, состоящего из полюсов возбуждения с намотанными на них катушками из медного провода;
- Коллектора – расположенных на валу медных пластин, к которым подключаются выводы катушек якорной обмотки;
- Подпружиненных графитовых или металлографитовых щеток (щеточной группы).
Охлаждается такой двигатель, как и аналог, работающий от переменного тока, – расположенной на валу крыльчаткой.
Двигатель, работающий от постоянного тока
Важно! В отличие от электродвигателя переменного тока частотой вращения ротора в таком силовом агрегате управляет специальный блок, который при помощи установленного на валу датчика Холла определяет положение ротора и его скорость. Работает подобный агрегат следующим образом:
Работает подобный агрегат следующим образом:
- На обмотку возбуждения подается напряжение, создавая тем самым постоянное магнитное поле;
- Через щетки и коллектор напряжение подается на катушки сердечника якоря – возникающее при этом магнитное поле отталкивается от такого же, образованного индуктором, вследствие чего двигатель начинает вращаться («запускается»);
- Впоследствии при вращении через щетки запитываются остальные катушки якорной обмотки, что приводит к равномерному вращению якоря с определённой скоростью.
Останавливают вращение такого агрегата прекращением подачи напряжения на щеточную группу.
Помимо описанных выше электромоторов, к машинам, работающим на постоянном токе, относится также роторный стартер – устройство, необходимое для запуска бензиновых и дизельных автомобильных двигателей внутреннего сгорания.