Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
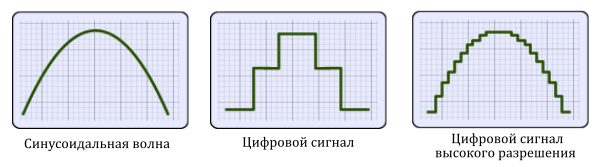
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
 Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Что такое шаговый двигатель?
Прежде чем перейти к статье, давайте сразу договоримся, что статья не направлена на специалистов, а её цель – донести любознательным любителям техники и технологий о таком устройстве, как шаговый двигатель и об основах работы с ними. Поэтому умников и критиков, жаждущих поговорить о великом многообразии управляемого и регулируемого электропривода, прошу идти общаться на тематические ресурсы по ЧПУ-станкам и 3D-принтерам.
Формулировка достаточно понятна, но её последнее предложение может вызвать некоторое недопонимание. Поэтому я предлагаю провести небольшое сравнение.
Всем известно что ротор «обычного» электродвигателя, будь то асинхронного, синхронного, коллекторного или любого другого будет вращаться до тех пор, пока на него подают напряжение питания, и после отключения питания он будет вращаться еще какое-то время по инерции, если же не используются какие-либо средства для его торможения.
Ротор такого двигателя вращается просто вокруг своей оси без каких-либо ограничений, на 360 градусов, и остановится он в любом месте. Зафиксировать его положением можно только механически (тормозом). По этой причине не получится добиться точного позиционирования исполнительных механизмов, что требуется в робототехнике, ЧПУ-станках и другом автоматизированном оборудовании.
Но шаговые двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол.
Питание такого двигателя невозможно без системы управления, или как его еще называют, драйвера — он подаёт импульсы в нужные обмотки, чтобы повернуть ротор на нужный угол. Это наглядно иллюстрирует приведенная ниже анимация.
Кроме того, что можно поворачивать двигатель на определенный угол и фиксировать его в этом положении, делать это всё можно без схемы обратной связи (датчиков положения и прочего).
Рассматривать типы шаговых двигателей в пределах этой статьи мы не будем, лишь кратко перечислим, какими они бывают. По конструкции:
2. С постоянными магнитами.
По способу питания:
- Униполярные (однополярные — ток пропускают через обмотки только в одну сторону).
- Биполярные (ток пропускают через обмотки в обе стороны). Здесь драйвер должен подавать напряжение различной полярности, что несколько усложняет схемотехнику. При тех же размерах развивают бОльшую мощность по сравнению с униполярными.
В униполярном двигателе зачастую 5 проводов — 1 общий, от середины каждой из двух обмоток, и 4 от концов обмоток. Иногда говорят «4 обмотки» — это также правильно, поскольку фактически мы получаем 4 обмотки соединенных в общей точки.
Также ШД могут отличаться и по количеству проводов, это зависит от того, как соединены обмотки и какое питание предполагается, некоторые варианты вы видите в таблице ниже.
Управление шаговым двигателем
Различают два способа управления шаговым двигателем:
1. Полношаговое
. Одновременно включается только пара обмоток (без перекрытия с другими). Достигается максимальный момент на валу, но точность установления угла меньше, чем в других способах.
2. Полушаговое
. В этом случае увеличивается количество шагов, соответственно повышается точность установки положения вала. На каждый первый шаг включается одна обмотка, на каждый второй шагами (полушаг) – пара обмоток. Но когда включена одна обмотка момент на валу снижается вдвое.
На анимациях ниже наглядно продемонстрировано
В некоторых источниках отдельно обозначают микрошаговое управление. Используется, когда необходимо максимальное количество шагов и точность управления. По способу управления оно похоже на полушаговый режим, между шагами включаются две обмотки, а отличие в том, что токи в них распределяются не равномерно. Главный недостаток такого подхода — усложняется коммутация (система управления).
Что выбрать: шаговый или серводвигатель?
Статья, которая поможет разобраться в чем отличие серводвигателя от шагового двигателя.
-
Бюджет
Если Вы жестко ограничены в бюджете, возможно, выбора как такового и нет. Шаговые двигатели значительно дешевле серводвигателей. Однако, такая закономерность действует только до определенного момента. Начиная с двигателей с размером фланца 110мм, стоимость приводов на шаговых моторах и сервоприводов Darxton серии DXS уже сопоставима. -
Размер станка.
Чем больше станок, тем более крупные шаговые двигатели ему требуются. Резонанс больших шаговых двигателей может привести к пропуску шагов и снижению чистоты обработки. Рекомендация : Если рабочее поле станка превышает 1.2 м2, или масса портала превышает 50 кг, мы настоятельно рекомендуем использовать серводвигатели. -
Сложность настройки
Сервосистемы имеют десятки настраиваемых параметров, требуют больше внимания и более высокую квалификацию оператора. Если Вы ищете простое решение «включил и работай» — возможно, вам лучше использовать шаговые двигатели. -
Наличие нагрузки на передачу в момент остановки
Так, на ось Z для удержания шпинделя обычно лучше подходят шаговые двигатели — для них удержание самый эффективный режим, вал фиксируется в положении удержания совершенно неподвижно, а высоких скоростей и ускорений по Z как правило не требуется. Сервопривод в таких условиях будет совершать микроколебания, что нежелательно.Аналогично, если двигатель планируется к установке на поворотную ось, где требуется медленное вращение, и после каждого углового шага следует серия движений шпинделя вдоль заготовки — шаговый двигатель лучше справится с удержанием.
-
Необходимость достигать высоких ускорений
Если есть такая необходимость — альтернативы серводвигателям нет. Шаговые двигатели весьма инертны, и попытка быстро разогнать его приведет к т.н. «срыву» — пропуску шагов или остановке вала. Тогда как сервоприводы способны кратковременно увеличить ток обмоток в 3-4 раза от номинального значения, чтобы развить больший момент и, соответственно, большее ускорение
-
Вероятность заклинивания механики
Если вероятность заклинивания механической системы велика (например, в случае приводных актуаторов систем открывания ворот), серводвигатели использовать нежелательно — шаговые двигатели просто будут пропускать шаги, в то время как сервопривод в случае неправильной настройки может повредить передачу или обмотки собственного двигателя. -
Звук
Шаговые двигатели при работе издают весьма сильный гул. Если для Вас низкий уровень шума критичен — следует использовать сервоприводы.
В общем же случае построения фрезерного или иного станка с ЧПУ, сервоприводы предпочтительней шаговых, за счет своих многочисленных преимуществ. Если Вы не смогли определиться что выбрать: шаговый или серводвигатель, изучите таблицу отличий.
|
Параметр |
Шаговые приводы |
Бесщеточные сервоприводы |
|
Момент |
Резко падает с увеличением скорости. Максимален при неподвижном вале |
Высокий на всем диапазоне скоростей. Максимален на высоких оборотах |
|
Удельная мощность |
Малая. Шаговый двигатель имеет крайне малый КПД — постоянно потребляет большой ток, основная часть энергии при этом выделяется в виде тепла |
Высокая. Потребляемый ток пропорционален нагрузке |
|
Обратная связь по положению |
Отсутствует. Пропущенный шаг останется незамеченным для системы ЧПУ. Однако, при правильном проектировании станка обратная связь не требуется |
Есть. Положение вала будет скорректировано, если это будет невозможно(например, вал заклинило) — система выдаст ошибку |
|
Точность позиционирования |
Не более 5% от величины шага |
Определяется установленным энкодером |
|
Безопасность |
Высокая. Если вал двигателя заклинило — он просто будет пропускать шаги |
Низкая. При заклинивании вала сервопривод может провернуть передачу, повредив её. Двигатель также может сгореть при неправильной настройке поведения драйвера при перегрузке |
|
Срок службы |
Очень большой |
Очень большой |
|
Резонанс ротора |
Есть. Шаговые двигатели подвержены резонансу, что приводит к пропуску шагов, снижению качества обработки и пр. |
Отсутствует |
|
Звук |
Сильный гул |
Слабый |
|
Нагрев |
Сильный. Зачастую требуется доп. охлаждение с помощью радиатора и вентилятора |
Слабый |
|
Перегрузки |
При перегрузках пропускает шаги, не способен резко ускориться |
Хорошо переносит перегрузки за счет кратковременного увеличения потребляемой мощности. Способен резко ускориться |
Важные характеристики
- С точки зрения электротехники, пошаговый привод – это достаточно сложное устройство, обладающее целым рядом параметров. Вот основные из них:
- Число полных шагов в течение одного цикла – от него зависит точность, плавность хода, разрешающая способность; у современных моделей должно быть на уровне 200-400.
- Угол дискретного перемещения (поворота вала) – рассчитывается как 360 0/количество отдельных передвижений за оборот; аналогичный предыдущему показатель, просто представленный в другом виде; его актуальные значения – 1,8-0,9 градусов.
- Пробивное напряжение – максимальное, по достижении которого нарушается изоляция, определяет безопасность использования.
- Допустимое постоянное напряжение – измеряется в статическом режиме на витках; в ряде случаев не приводится, но и тогда его можно рассчитать по закону Ома.
- Номинальный ток – наибольший из возможных для безопасного и бесперебойного функционирования силового агрегата.
- Сопротивление обмотки – оно, вместе с предыдущей характеристикой, говорит о том, какое количество Вольт можно подавать на пошаговые электродвигатели.
- Индуктивность фазы – определяет скорость нарастания тока; приобретает особенно важную роль при быстром вращении вала.
- Сопротивление изоляции – между обмотками и корпусом.
Отдельным семейством параметров являются моменты:
- крутящий – зависит от частоты вращения; указывается максимальный для данного силового агрегата;
- инерции – чем он меньше, тем быстрее разгон;
- стопорный – нужен для прокручивания вала в случае отсутствия питания;
- удерживающий – активен при полной остановке и запитывании номинальным током двух фаз.
Подключение шагового двигателя
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам. В первом случае используется один центр-кран каждой обмотки и один конец провода. Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу. Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Благодаря высокой степени защиты шаговые двигатели успешно работают в тяжелых условиях.
Управление шаговым двигателем на Ардуино
Рассмотрим управление шаговым мотором при помощи стандартной библиотеки stepper.h и с помощью более удобной и популярной библиотеки accelstepper.h, где реализовано намного больше дополнительных команд и функций. Схема подключения мотора при этом остается неизменной. Чуть дальше мы перечислили возможные команды, которые можно использовать в программе с этими библиотеками.
Скетч для шагового двигателя на Ардуино (Stepper.h)
#include <Stepper.h> // библиотека для шагового двигателя
// количество шагов на 1 оборот, измените значение для вашего мотора
const int stepsPerRevolution = 200;
// устанавливаем порты для подключения драйвера
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
myStepper.setSpeed(60); // устанавливаем скорость 60 об/мин
}
void loop() {
// поворачиваем ротор по часовой стрелке
myStepper.step(stepsPerRevolution);
delay(500);
// поворачиваем ротор против часовой стрелки
myStepper.step(-stepsPerRevolution);
delay(500);
}
Пояснения к коду:
- вместо портов 8,9,10,11 можно использовать любые цифровые порты;
- библиотека Stepper.h имеет маленький функционал, поэтому подходит только для тестирования шагового двигателя и проверки подключения драйвера.
Скетч для шагового мотора с библиотекой AccelStepper.h
#include <AccelStepper.h> // библиотека для шагового двигателя
Пояснения к коду:
- библиотеку AccelStepper.h можно использовать при подключении шагового двигателя к Motor Shield L293D совместно с библиотекой AFMotor.h;
- в программе можно задавать не только максимальную скорость, но и ускорение и замедление вала шагового двигателя.
Описание команд библиотеки AccelStepper.h
// Шаговый двигатель, управляемый платой// Шаговый двигатель, управляемый Н-мостом// Униполярный двигатель// Установка скорости оборотов в минуту// Установка скорости в шагах за секунду// Установка ускорения
// Возвращает текущее положение в шагахОбнуляет текущую позицию до нуля// Конечное положение в шагах// Вернуть расстояние до указанного положения// Переместиться в абсолютно указанное положение// Переместиться в относительно указанное положение
// Начать движение с ускорением, функцию следует вызывать повторно// Начать движение до указанной точки// Начать движение с ускорением до заданной позиции// Максимально быстрая остановка (без замедления)// Начать движение с заданной скоростью без плавного ускорения// Начать движение без плавного ускорения, до позиции
// Деактивирует зарезервированные пины и устанавивает их в режим LOW. Снимает напряжение с обмоток двигателя, экономя энергию// Активирует зарезервированные пины и устанавивает их в режим OUTPUT. Вызывается автоматически при запуске двигателя
Альтернативные варианты
Единственный конкурент шагового двигателя в ЧПУ станке — сервомотор. Его установка требует реализации более сложной схемы управления с обратной связью (энкодером). Есть у него и другие недостатки. Выбор между сервоприводом и шаговым двигателем для ЧПУ станка вызывает много вопросов у начинающих станочников и споров на форумах. Чтобы определить оптимальный состав привода, нужно учесть следующие факторы:
- Стоимость. При жестких ограничениях в бюджете широкий выбор отсутствует в принципе, и считается, что шаговый двигатель значительно дешевле сервомотора. Но это справедливо для устройств небольших типоразмеров. Чем больше мощность, тем меньше разница в цене, а у некоторых крупных моделей стоимость моторов обоих типов сопоставима.
- Массово-габаритные характеристики станка. Чем больше станок, тем большая мощность нужна для перемещения рабочих органов. Склонность к резонансным явлениям сильнее проявляется у мощных шаговых двигателей, что может привести к пропуску шагов и снижению точности обработки. Для фрезерных станков с ЧПУ рекомендуется выбирать серводвигатели, если масса портала превышает 50 кг.
- Сложность настройки. Схемы приводов с обратной связью требуют точной наладки и высокой квалификации оператора. Если требуется самое простое решение, оптимальным выбором для станка с ЧПУ будет шаговый двигатель.
- Вероятность перегрузок и заклинивания. Считается, что при заклинивании серводвигатель обязательно выйдет из строя. Это не совсем так. Если станок настроен правильно, драйвер не пошлет сигнал на повторную отработку перемещения, выполнение программы прекратится, и стойка перейдет в режим ожидания до вмешательства оператора или наладчика. Шаговые двигатели при перегрузке могут пропустить несколько шагов. Из-за отсутствия обратной связи СЧПУ не узнает об этом и продолжит отсчитывать шаги дальше. Пропуск нескольких шагов при кратковременном заклинивании – это бракованная деталь на выходе. Потеря шагов также возможна при внешних вибрационных воздействиях и ударах.
- Скорость перемещения. В массивных ЧПУ станках с шаговыми двигателями скорость движения портала обычно не превышает 9 м/мин. Если материал заготовки и режущий инструмент позволяют назначить режим обработки на более высоких скоростях, то мотор будет «узким местом», ограничивающим производительность. Тот же портал с приводом от серводвигателя аналогичного типоразмера сможет развить скорость до 60 м/мин.
- Рабочие ускорения. Чрезмерный разгон шагового двигателя неизбежно приведет к пропуску шагов. Если предполагается работа на высоких ускорениях, лучше выбрать сервомотор.
- Нагрузка на передачу в момент остановки. В тяжелых станках с ЧПУ шаговые двигатели часто устанавливают на механизмы вертикального перемещения шпинделя. Ротор затормаживается магнитными силами после остановки. Сервопривод в остановленном положении совершает колебания, что очень нежелательно. Шаговый двигатель хорошо ведет себя в механизмах поворота заготовки (4-ой оси), кода требуется удерживать ее в стационарном положении.
Конструкция и управление шаговым двигателем
В нашем простом примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора окружен четырьмя электромагнитными катушками, помеченных A, B, C и D. Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить» из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например, « ADCB, ADCB, ADCB, A… » и т.д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на « ABCD, ABCD, ABCD, A… » и т. д. ротор будет вращаться в противоположном направлении (назад).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45°. Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60°друг от друга.
Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней», чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 o / 24 = 15 o .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6°на шаг. Чтобы повернуть двигатель на угол, скажем, 216°, а затем снова остановиться в требуемом положении, потребуется всего: 216°/ (3,6°/ шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя. Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Направление вращения также может быть выбрано вместе с одношаговым режимом или непрерывным (бесступенчатым) вращением в выбранном направлении, но это накладывает некоторую нагрузку на контроллер. При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
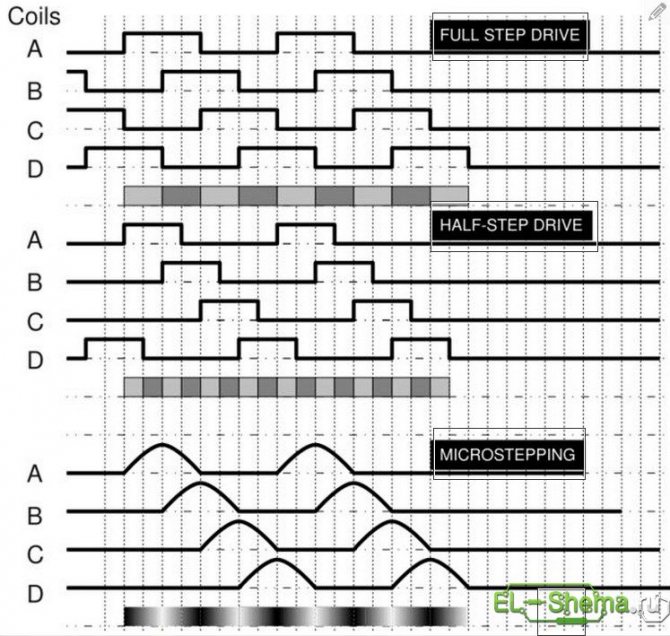
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Знакомство
Сначала немного посмотрим на внешний вид нашего героя:
Он действительно очень маленький! Согласно умной книжке Петренко С.Ф.
«Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу
биполярных шаговых двигателей
Посмотрим как он устроен:
Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать.
Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше.
Сопротивление обмоток около 26Ом
, хотя продавец указал 14Ом.
В описании сказано, что
напряжение питания 5В
. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки.
Пробуем подключить.
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
| Шаговый двигатель Nema17 42BYGH 1.7A (17HS4401-S) для 3D принтера | Набор из 5 шаговых двигателей ULN2003 28BYJ-48 с платам драйверов для Ардуино | Шаговый двигатель с модулем драйвера 5V Stepper Motor 28BYJ-48 + ULN2003 |
| Еще один вариант шагового двигателя для Arduino 28BYJ-48 5V 4 Phase DC Motor + ULN2003 Drive Test Board | Набор из трех шаговых двигателей Nema17 Stepper Motor 42BYGH 1.7A (17HS4401) для 3D приентера | AliExpress.com Product – 3D Printer Parts StepStick A4988 DRV8825 Stepper Motor Driver With Heat sink Carrier Reprap RAMPS 1.4 1.5 1.6 MKS GEN V1.4 board |