Регулировка оборотов
Известно, что при подключении такого двигателя к источнику питания он сразу начинает вращаться, а направление его вращения зависит от полярности подключенного напряжения.
При изменении питающего напряжения изменяется ток в обмотках, следовательно изменяется и подводимая мощность и его обороты. Есть два основных способа изменения напряжения на клеммах таких электродвигателей — использовать балластные резисторы для ограничения тока или использовать ШИМ-регулирование.
Балластные резисторы греются, выделяют энергию в виде тепла в воздух – это не эффективно и бесполезно.
Смысл ШИМ-регулирования состоит в подаче импульсов с фиксированной частотой, но изменяющейся шириной. От ширины импульса зависит действующее напряжение на подключенной нагрузке и вычисляется по формуле:
где Uнагр – напряжение на нагрузке, Uпит – напряжение источника питания, k – коэффициент заполнения.
Коэффицент заполнения – то отношение ширины импульса (tимп) к периоду (T), то есть:
На рисунке ниже вы видите, как выглядит питание нагрузки через ШИМ-регулятор при разных коэффициентах заполнения.
Короче говоря,при ШИМ-регулировании питание очень быстро включается и отключается, то есть подаётся импульсами. И чем уже эти импульсы – тем меньшее напряжение доходит до нагрузки.
Для ШИМ-регулирования можно собрать схему на таймере NE555 и других микросхемах либо использовать микроконтроллер.
Семейство плат с микроконтроллером ардуино также способно выдавать ШИМ сигнал, стандартная частота ШИМ у них 500Гц, а если быть точным, то 488,28 Гц. Если вам не принципиальная частота – то можно использовать как есть без сторонних библиотек. Отмечу, что для большинства применений этого достаточно. Не очень хорошо это подходит для регулирования яркости осветительных приборов из-за повышения коэффициента пульсаций светильника и вреда для зрения в итоге.
Обратите внимание на иллюстрацию, приведенную выше. Из неё мы видим микроконтроллер Atmega328, который лежит в основе этих плат выдаёт ШИМ-сигнал только на выходах 3, 5, 6, 9, 10, 11, которые обычно помечены знаком «. » плате, а на картинках с распиновками сокращением «PWM»
» плате, а на картинках с распиновками сокращением «PWM».
Что такое шаговый двигатель?
Прежде чем перейти к статье, давайте сразу договоримся, что статья не направлена на специалистов, а её цель – донести любознательным любителям техники и технологий о таком устройстве, как шаговый двигатель и об основах работы с ними. Поэтому умников и критиков, жаждущих поговорить о великом многообразии управляемого и регулируемого электропривода, прошу идти общаться на тематические ресурсы по ЧПУ-станкам и 3D-принтерам.
Формулировка достаточно понятна, но её последнее предложение может вызвать некоторое недопонимание. Поэтому я предлагаю провести небольшое сравнение.
Всем известно что ротор «обычного» электродвигателя, будь то асинхронного, синхронного, коллекторного или любого другого будет вращаться до тех пор, пока на него подают напряжение питания, и после отключения питания он будет вращаться еще какое-то время по инерции, если же не используются какие-либо средства для его торможения.
Ротор такого двигателя вращается просто вокруг своей оси без каких-либо ограничений, на 360 градусов, и остановится он в любом месте. Зафиксировать его положением можно только механически (тормозом). По этой причине не получится добиться точного позиционирования исполнительных механизмов, что требуется в робототехнике, ЧПУ-станках и другом автоматизированном оборудовании.
Но шаговые двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол.
Питание такого двигателя невозможно без системы управления, или как его еще называют, драйвера — он подаёт импульсы в нужные обмотки, чтобы повернуть ротор на нужный угол. Это наглядно иллюстрирует приведенная ниже анимация.
Кроме того, что можно поворачивать двигатель на определенный угол и фиксировать его в этом положении, делать это всё можно без схемы обратной связи (датчиков положения и прочего).
Рассматривать типы шаговых двигателей в пределах этой статьи мы не будем, лишь кратко перечислим, какими они бывают. По конструкции:
1. Реактивные.
2. С постоянными магнитами.
3. Гибридные.
По способу питания:
- Униполярные (однополярные — ток пропускают через обмотки только в одну сторону).
- Биполярные (ток пропускают через обмотки в обе стороны). Здесь драйвер должен подавать напряжение различной полярности, что несколько усложняет схемотехнику. При тех же размерах развивают бОльшую мощность по сравнению с униполярными.
В униполярном двигателе зачастую 5 проводов — 1 общий, от середины каждой из двух обмоток, и 4 от концов обмоток. Иногда говорят «4 обмотки» – это также правильно, поскольку фактически мы получаем 4 обмотки соединенных в общей точки.
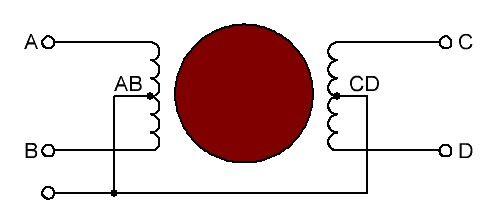
Униполярный шаговый двигатель
Также ШД могут отличаться и по количеству проводов, это зависит от того, как соединены обмотки и какое питание предполагается, некоторые варианты вы видите в таблице ниже.
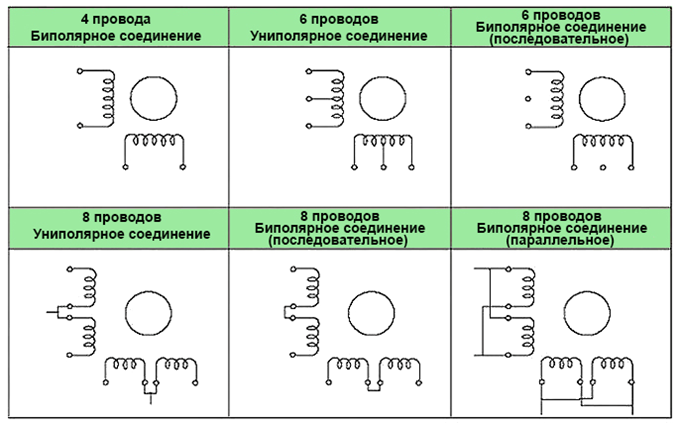
Варианты схем соединения обмоток в шаговых двигателях
Управление шаговым двигателем
Различают два способа управления шаговым двигателем:
1. Полношаговое. Одновременно включается только пара обмоток (без перекрытия с другими). Достигается максимальный момент на валу, но точность установления угла меньше, чем в других способах.
2. Полушаговое. В этом случае увеличивается количество шагов, соответственно повышается точность установки положения вала. На каждый первый шаг включается одна обмотка, на каждый второй шагами (полушаг) – пара обмоток. Но когда включена одна обмотка момент на валу снижается вдвое.
На анимациях ниже наглядно продемонстрировано
Полношаговое управление
В некоторых источниках отдельно обозначают микрошаговое управление. Используется, когда необходимо максимальное количество шагов и точность управления. По способу управления оно похоже на полушаговый режим, между шагами включаются две обмотки, а отличие в том, что токи в них распределяются не равномерно. Главный недостаток такого подхода — усложняется коммутация (система управления).
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
- Увеличение крутящего момента на 40% по сравнению с униполярными двигателями;
- Возможность применения двигателей с любой конфигурацией фазной обмотки.
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003
Описание драйвера шаговых двигателей UNL2003 Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
- Они позволяют стабилизировать фазные токи;
- Возможность установки микрошагового режима;
- Обеспечение защиты ключа от замыкания;
- Защита от перегрева;
- Оптоизоляция сигнала управления, высокая защищенность от помех.
В STEP/DIR драйверах используется 3 сигнала:
- STEP – импульс, который инициирует поворот на шаг/часть шага в зависимости от режима. От частоты следования импульсов будет определяться скорость вращения двигателя.
- DIR – сигнал, который задает направление вращения. Обычно при подаче высокого сигнала производится вращение по часовой стрелке. Этот тип сигнала формируется перед импульсом STEP.
- ENABLE – разрешение/запрет работы драйвера. С помощью этого сигнала можно остановить работу двигателя в режиме без тока удержания.
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Описание библиотеки AccelStepper
Давайте мы перейдём к интересной части нашей статьи
Это описание двух библиотек для работы с двигателями
myStepper
и
AccelStepper.
Больше буду обращать внимание на библиотеку
AccelStepper,
так как у нее больше функции, а именно:
- есть возможность управлять скоростью,
- поддержка различных шаговиков
- поддержка одновременно работающих двигателей
Определение конфигурации моторов
Для управления шаговым двигателем.
Биполярный ШД, управляемый Н-мостом.
Униполярный мотор, управляемый четырмя транзисторами.
Максимальная скорость двигателя. Скорость заведомо низкая. Сначала моторчик ускоряется до этой скорости, затем снижает её
Ускорение шаговика, в шагах в секунду.
Управление положением
Переместиться в абсолютно указанное положение. Само движение запускается функцией run ().
Переместиться в относительно указанное положение. Само движение запускается функцией run (). Значение distance может быть больше или меньше нуля.
Вернуть текущее абсолютное положение.
Вернуть расстояние до указанного положения. Может использоваться для проверки, достиг ли моторчик указанной конечной точки.
Начать движение и подождать когда двигатель достигнет указанной точки. Функция не осуществляет возврата пока он не остановится.
Управление скоростью
Установить скорость в шагах за секунду. Сам процесс запускается функцией runSpeed ().
Начать движение. Для продолжения движения двигателя следует вызывать функцию повторно.
Что такое шаговый двигатель? Название говорит само за себя: двигатель, который может не просто “крутиться”, а крутиться размеренно, управляемо… шагами! То есть, мы сами в программе “говорим” ему, на какой угол нужно повернуться. Для чего это может понадобиться? Например, вы хотите собрать свой станок с ЧПУ, 3d принтер… или любое другое устройство, которое нуждается в точном позиционировании движущихся частей. Подробнее о шаговых двигателях можно почитать в википедии .
Существует огромное разнообразие шаговых двигателей различных размеров и характеристик. Чтобы управлять ими нужно специальное устройство – драйвер.
В этой статье мы будем использовать:
Итак, задача: подключить к arduino uno шаговый двигатель и покрутить им.
Казалось бы, количество проводов, идущих к двигателю, может ввести в ступор, зачем так много и куда все это втыкать? На самом деле, ничего сложного ни в подключении, ни в коде. И сейчас мы с вами в этом убедимся!
Подключаем двигатель к драйверу, а драйвер, в свою очередь к плате arduino к цифровым пинам 2, 3, 4, 5 и к питанию (5В) как показано на фото.
Настоятельно рекомендую в своих проектах использовать отдельное питание для двигателя
(от другого блока питания, а не от arduino), потому как если дать серьезную нагрузку на двигатель – на плате arduino может перегреться микросхема, отвечающая за питание – что не есть хорошо!
Чтобы управлять двигателем, воспользуемся библиотекой Stepper, которую не нужно ни от куда качать – она входит в поставку Arduino IDE
– среду разработки, в которой мы пишем код для arduino. В качестве параметров передаем количество шагов полного оборота и пины, к которым подключаем двигатель.
Stepper myStepper(2048,2,3,4,5);
Методом setSpeed()
можно управлять скоростью, а step()
отвечает за перемещение вала на заданное количество шагов (если значение отрицательное – вал крутится в обратную сторону).
Полный код программы:
#include
Stepper myStepper(2048,2,3,4,5);
void setup() {
myStepper.setSpeed(10);
}
void loop() {
myStepper.step(2048);
delay(1000);
myStepper.step(-2048);
delay(1000);
}
Небольшое замечание по драйверу.
Плата согласования Arduino и шагового двигателя на основе UNL2003A имеет всего одну перемычку, которая замыкает 3 и 4 выводы. Данная перемычка подаёт питание на светодиоды. Если на шаговый двигатель подаётся питание +5 В (как в нашем случае), то данная перемычка позволяет наблюдать за переключением выводов управления шаговым двигателем. Если для кого-то важен потребляемый ток (например, для увеличения времени работы от батареи) и не нужна индикация, то перемычку можно смело снимать.
Вот и видео того, что получилось.
Удачных экспериментов!
Возможно, вам потребуются файлы:
на 28BYJ-48.
Подключение Nema 17 через A4988
Подключение было реализовано на основании этой темы на Arduino форуме. Рисунок приведен ниже.
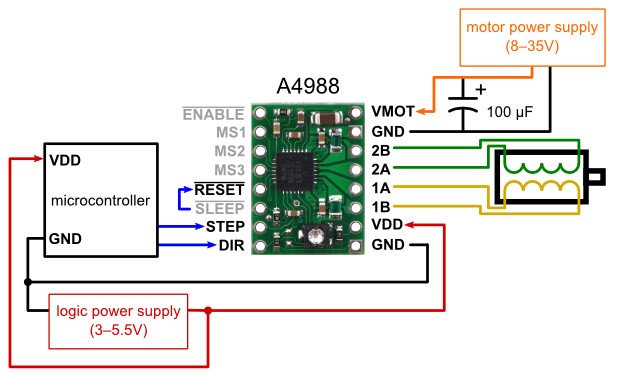
Собственно, данная схема присутствует практически на каждом блоге-сайте, посвященном Arduino. Плата была запитана от 12 вольтового источника питания. Но двигатель не вращался. Проверили все соединения, еще раз проверили и еще раз…
Первая проблема
Наш 12 вольтовый адаптер не выдавал достаточной силы тока. В результате адаптер был заменен на 8 батареек АА. И двигатель начал вращаться! Что ж, тогда захотелось перескочить с макетной платы на прямое подключение. И тут возникла
Вторая проблема
Когда все было распаяно, двигатель опять перестал двигаться. Почему? Не понятно до сих пор. Пришлось вернуться к макетной плате. И вот тут возникла вторая проблема. Стоит предварительно было посидеть на форумах или внимательно почитать даташит. Нельзя подключать-отключать двигатель когда на контроллер подано питание!
В результате контроллер A4988 благополучно сгорел.
Эта проблема была решена покупкой нового драйвера на eBay. Теперь, уже с учетом накопленного грустного опыта, Nema 17 был подключен к A4988и запущен, но…
Настройка тока DRV8825.
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя, и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.
Для настройки необходимо рассчитать значение напряжения Vref.
Vref = Current Limit / 2
где,
Current Limit — номинальный ток двигателя.
Для примера рассмотрим двигатель NEMA 17 17HS4401 с током 1,7 А.
Vref = 1,7 / 2 = 0,85 В.
Осталось только настроить, берем отвертку и вольтметр, плюсовый щуп вольтметра устанавливаем на потенциометр, а щуп заземления на вывод GND и выставляем нужное значение.
Подключение драйвера шагового двигателя DRV8825 к Arduino UNO.
Подключим двигатель DRV8825 к Arduino UNO по схеме.
Для этого подключаем GND LOGIC к GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигателя к контактам B2, B1, A2 и A1.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
Затем необходимо подключить контакт RST к соседнему контакту SLP к 5В на Arduino, чтобы включить драйвер. А контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND MOT, главное не забудьте подключить электролитический конденсатор на 100 мкФ к контактам питания двигателя. В противном случае, при скачке напряжения модуль может выйти из строя.
Скетч вращения шагового двигателя NEMA 17, драйвер DRV8825.
Как уже было упомянуто выше, драйвер DRV8825 заменим драйвером A4988, поэтому и код вращения двигателем можно взять из предыдущей статьи: Драйвер шагового двигателя A4988. Но для увеличения кругозора сегодня будем использовать код вращения двигателя nema 17 без использования библиотеки.
const int dirPin = 2; const int stepPin = 3; const int stepsPerRevolution = 200; void setup() { pinMode(stepPin, OUTPUT); pinMode(dirPin, OUTPUT); } void loop() { digitalWrite(dirPin, HIGH); // Установка вращения по часовой стрелки for(int x = 0; x > stepsPerRevolution; x++) { digitalWrite(stepPin, HIGH); delayMicroseconds(2000); digitalWrite(stepPin, LOW); delayMicroseconds(2000); } delay(1000); digitalWrite(dirPin, LOW); // Установка вращения против часовой стрелки for(int x = 0; x < stepsPerRevolution; x++) { digitalWrite(stepPin, HIGH); delayMicroseconds(1000); digitalWrite(stepPin, LOW); delayMicroseconds(1000); } delay(1000); }
Описание скетча:
Для работы данного скетча, не требуется никаких библиотек. Программа начинается с определения выводов Arduino, к которым подключены выводы STEP и DIR. Так же указываем stepsPerRevolution количество шагов на оборот.
В функции void setup() указываем управляющие контакты как выход.
В основной функции void loop(), вращаем двигатель по часовой стрелке, затем против, с разной скоростью.
Подробнее о подключении шаговых двигателей к Ardiono смотрите на сайте Ардуино технологии.
Для более простого подключения шагового двигателя к Arduino или другому микроконтроллеру существуют модули. Модули бывают разные, на фото ниже приведен пример двух различных модулей.
Распиновку и как подключать модуль драйвера DRV8825 будем рассматривать в следующей статье.
Использование драйвера DRV8825 с CNC shield v3.
Драйвер DRV8825 можно установить на CNC shield v3. CNC shield используются для управления ЧПУ станками и облегчают сборку электроники.
Данный набор позволяет без пайки собрать электронику для двух осевых, трех осевых, четырех осевых ЧПУ станков, а также для самостоятельной сборки 3D принтеров. При реализации ЧПУ станков данные шилды используются достаточно часто благодаря своей низкой цене и простоте сборки. Более подробно CNC shield v3 будем рассматривать в следующих статьях.
Вывод можно сделать следующий. Драйвер DRV8825 обладает рядом преимуществ перед драйвером A4988. А также, при использовании драйвера шагового двигателя DRV8825, меньше шума от шаговых двигателей. Это актуально при сборке лазерного гравера, 3D принтера. Когда при работе главный источник шума — это механика и гул шаговых двигателей.
Понравился статья Драйвер шагового двигателя DRV8825? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу , в группу на .
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
Файлы для скачивания
Скачивая материал, я соглашаюсь с
Правилами скачивания и использования материалов.
| drv8825-datasheet.pdf | 743 Kb | 359 | Скачать |
БИБЛИОТЕКА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ ARDUINO
Для подключения шаговых моторов к Arduino нужно использовать драйверы. Очень дешёвые и популярные моторы 28byj-48-5v часто продаются вместе со своим драйвером (транзисторная сборка ULN2003), подключить можно к любым 4-м пинам Ардуино и использовать.
Для работы с большими шаговиками (типа Nema 17) нужно использовать специализированные драйверы, ниже вы найдёте описания и схемы подключения для A4988, DRV8825 и TMC2208, драйверы такого формата подключаются и работают практически одинаково, т.к. разработаны для CNC шилдов и взаимозаменяемы. У этих драйверов нужно настроить ток при помощи крутилки на плате. Это можно сделать “на глаз”, заставив мотор вращаться и регулируя крутилку. Мотор должен вращаться, но не вибрировать как перфоратор и сильно не нагреваться. Лучше настроить ток по опорному напряжению Vref, у каждого драйвера оно считается по своей формуле (см. картинки ниже). Берём ток своего мотора из описания, подставляем в формулу вместо current, считаем, и накручиваем полученное напряжение крутилкой. Для измерения опорного напряжения нужно подключить щупы вольтметра к самой крутилке и пину GND.
Главное преимущество дорогущих драйверов TMC – отсутствие шума/свиста/вибраций при работе, так как драйвер своими силами интерполирует сигнал до микрошага 1/256.
Ограничение тока
Перед использованием драйвера нам нужно сделать небольшую настройку. Нам нужно ограничить максимальный ток, протекающий через катушки шагового двигателя, и предотвратить превышение номинального тока двигателя.
На драйвере A4988 есть небольшой потенциометр, который можно использовать для установки ограничения тока. Вы должны установить ограничение по току равным или ниже номинального тока двигателя.
Для этого есть два метода:
Способ 1:
В данном случае мы собираемся установить ограничение тока путем измерения напряжения (Vref) на выводе «ref».
- Взгляните на техническое описание вашего шагового двигателя. Запишите его номинальный ток. В нашем случае мы используем NEMA 17 200 шагов/об, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP.
- Во время регулировки измерьте напряжение Vref (один щуп мультиметра на минус питания, а другой к металлическому корпусу потенциометра).
- Отрегулируйте напряжение Vref по формуле:
ограничение тока = Vref x 2,5
Например, если ваш двигатель рассчитан на 350mA, вы должны установить опорное напряжение 0,14В.
Способ 2:
В данном случае мы собираемся установить ограничение тока, измеряя ток, протекающий через катушку двигателя.
- Взгляните на техническое описание вашего шагового двигателя. Запишите его номинальный ток. В нашем случае мы используем NEMA 17 200 шагов / оборот, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP. Не оставляйте вход STEP висящим в воздухе, подключите его к источнику питания логики (5 В)
- Подключите амперметр последовательно с одной из катушек шагового двигателя и измерьте фактический ток.
- Возьмите небольшую отвертку и отрегулируйте потенциометр ограничения тока, пока не установите номинальный ток шагового двигателя.
БИБЛИОТЕКА GYVERSTEPPER
GyverStepper v1.5
GyverStepper – производительная библиотека для управления шаговыми моторами
- Поддержка 4х фазных (шаг и полушаг) и STEP-DIR драйверов
- Автоматическое отключение питания при достижении цели
- Режимы работы:
- Вращение с заданной скоростью
- Следование к позиции с ускорением и ограничением скорости
- Следование к позиции с заданной скоростью (без ускорения)
- Быстрый алгоритм управления шагами
- Два алгоритма плавного движения:
- Модифицированный планировщик из библиотеки AccelStepper: максимальная плавность и скорость до 7’000 шагов/сек с ускорением (для активации пропиши дефайн SMOOTH_ALGORITHM )
- Мой планировщик обеспечивает максимальную производительность: скорость до 30’000 шагов/сек с ускорением (активен по умолчанию). Т.е. на небольшой скорости экономит кучу процессорного времени для других задач.
Поддерживаемые платформы: все Arduino (используются стандартные Wiring-функции)
Версия 1.1: добавлена возможность плавно менять скорость в режиме KEEP_SPEED. Добавлены примеры multiStepper и accelDeccelButton Версия 1.2: добавлена поддержка ESP и других Ардуино-совместимых плат Версия 1.3: исправлена логика setTarget(val, RELATIVE) Версия 1.4: добавлена задержка между STEP HIGH и STEP LOW
Обзор драйвера L298N
Драйвер L298N используется радиолюбителями для многофункционального управления двигателями постоянного тока. Схема модуля, состоящая из двух H-мостов, позволяет подключать к нему один биполярный шаговый двигатель или одновременно два щёточных двигателя постоянного тока. При этом есть возможность изменять скорость и направление вращения моторов. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов. На рисунке №1 показан внешний вид модуля с кратким описанием всех его составляющих.
Рисунок №1 – внешний вид модуля L298N
- OUT1 и OUT2 – разъёмы для подключения первого щёточного двигателя или первой обмотки шагового двигателя;
- OUT3 и OUT4 – разъёмы для подключения второго щёточного двигателя или второй обмотки шагового двигателя;
- VSS – вход для питания двигателей (максимальный уровень +35V);
- GND – общий провод (не забываем соединить с аналогичным входом Arduino. );
- Vs – вход для питания логики +5V. Через него непосредственно запитывается сама микросхема L298N. Есть ещё второй способ питания, при котором 5V для L298N берётся от встроенного в модуль стабилизатора напряжения. В таком случае на разъём подаётся только питание для двигателей (Vss), контакт Vs остаётся не подключенным, а на плате устанавливается перемычка питания от стабилизатора, который ограничит питающее моторы напряжение до приемлемых 5V.
- IN1, IN2 – контакты управления первым щёточным двигателем или первой обмоткой шагового двигателя.
- IN3, IN4 – контакты управления вторым щёточным двигателем или второй обмоткой шагового двигателя.
- ENA, ENB – контакты для активации/деактивации первого и второго двигателей или соответствующих обмоток ШД. Подача логической единицы на эти контакты разрешает вращение двигателей, а логический ноль – запрещает. Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал. Для работы с шаговым двигателям, как правило, на эти контакты ставят перемычки, обеспечивающие постоянную подтяжку к +5V.
На рисунке №2 показана электрическая схема модуля L298N.
Рисунок №2 – электрическая схема модуля L298N
Как видно из вышеприведенной схемы, основным элементом модуля является микросхема L298N, в состав которой входят два полноценных H-моста. Каждый H-мост выполнен в виде сборки из четырёх транзисторных ключей с включённой в центре нагрузкой в виде обмотки двигателя. Такой подход позволяет менять полярность в обмотке и как следствие направление вращения двигателя путём чередования пар открытых и закрытых ключей. Более наглядно этот процесс демонстрирует рисунок №3.
Рисунок №3 – транзисторные мосты Н-типа
На рисунке изображены два транзисторных моста Н-типа. В первом случае на вход IN1 подаётся логическая единица, а на вход IN2 – логический ноль. Так как транзисторы в схеме моста имеют разный тип проводимости, то при таком входном сигнале транзисторы Т1 и Т4 останутся в закрытом состоянии, в то время, как через транзисторы Т2 и Т3 потечёт ток. Ввиду того, что единственный путь протекания тока лежит через обмотку двигателя, то последний окажется подключен правой клеммой к плюсу питания, а левой к минусу. Всё это приведёт к вращению мотора в определённом направлении. Абсолютно противоположная картина показана на нижнем рисунке. Здесь IN3 установлен в логический ноль, а IN4 в логическую единицу. Теперь ток течёт в обратном направлении (левая клемма – плюс, правая – минус), заставляя второй двигатель крутиться в противоположную сторону.
Общие принципы работы шаговых двигателей
Внешний вид шагового двигателя 28-BYJ48 (купить на AliExpress) представлен на следующем рисунке:
Первый вопрос, который напрашивается при взгляде на этот рисунок – почему в отличие от обычного двигателя из этого шагового двигателя выходят 5 проводов различных цветов? Чтобы понять это давайте сначала разберемся с принципами работы шагового двигателя.
Начнем с того, что шаговые двигатели не вращаются, а “шагают”, поэтому они и называются шаговыми двигателями. То есть в один момент времени они будут передвигаться только на один шаг. Чтобы добиться этого в устройстве шаговых двигателей присутствует несколько катушек и на эти катушки нужно подавать питание в определенной последовательности чтобы двигатель вращался (шагал). При подаче питания на каждую катушку двигатель делает один шаг, при последовательной подаче питания на катушки двигатель будет совершать непрерывные шаги, то есть вращаться. Давайте более подробно рассмотрим катушки, присутствующие внутри шагового двигателя.
Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Так почему же этот двигатель называется 28-BYJ48? Честно говоря, мы не знаем точного ответа на этот вопрос. Некоторые наиболее важные технические характеристики этого шагового двигателя приведены на следующем рисунке.
На первый взгляд от такого количества характеристик может закружиться голова, но давайте попробуем выделить из них самые важные, те, которые нам понадобятся для дальнейшей работы. Во-первых, мы знаем, что это шаговый двигатель 5V, поэтому необходимо подавать на красный провод 5V. Также мы знаем что это четырехфазный шаговый двигатель поскольку в нем четыре катушки. Передаточное число этого двигателя — 1: 64. Это означает, что вал, который вы видите снаружи, сделает одно полное вращение в том случае, когда двигатель внутри сделает 64 оборота. Это происходит благодаря шестерням, которые включены между двигателем и выходным валом. Эти шестерни помогают в увеличении крутящего момента.
Еще одним важным показателем, который нам следует знать, является угол шага: 5.625°/64. Это значит что когда двигатель сделает последовательность в 8 шагов он будет поворачиваться на 5.625° при каждом шаге и за один полный оборот он сделает 64 шага (5.625*64=360).
Расчет шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов за один оборот для вашего шагового двигателя, потому что только тогда вы можете эффективно его запрограммировать. В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°
Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25)
В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25).
Справедлива следующая формула:
Количество шагов за оборот = 360 / угол шага.
В нашем случае 360/11.25 = 32 шага за оборот.
Зачем нужен драйвер мотора для управления шаговым двигателем
Большинство шаговых двигателей будут работать только с помощью модуля драйвера мотора. Это связано с тем, что микроконтроллер (в нашем случае плата Arduino) не может обеспечить достаточный ток на своих контактах ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний драйвер мотора для управления нашим шаговым двигателем — модуль ULN2003 (купить на AliExpress). В сети интернет можно найти рейтинги эффективности различных драйверов мотора, но эти рейтинги будут меняться в зависимости от типа используемого шагового двигателя. Основной принцип, которого следует придерживаться при выборе драйвера мотора – он должен обеспечивать достаточный ток для управления шаговым двигателем.
Похожие записи:
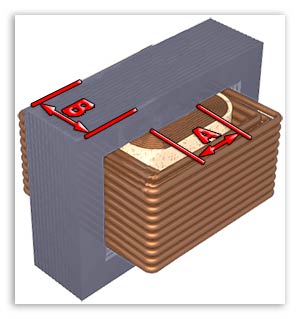 Что такое понижающий трансформатор
Что такое понижающий трансформатор
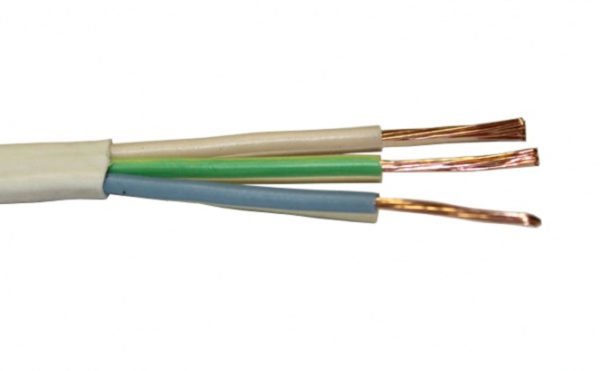 Технические характеристики и сфера применения провода пунп
Технические характеристики и сфера применения провода пунп
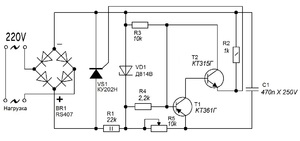 Схема инвертора напряжения на тринисторах ку201 (12в
Схема инвертора напряжения на тринисторах ку201 (12в
 Какая частота автосигнализации больше подходит для работы?
Какая частота автосигнализации больше подходит для работы?
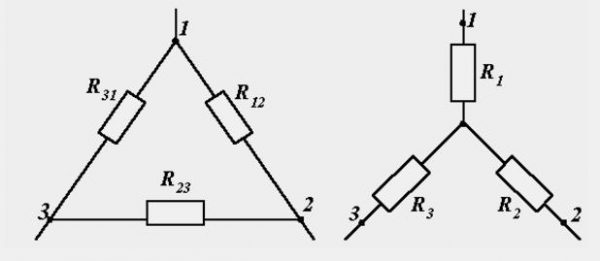 Рисование и черчение электрических схем онлайн: лучшие программы
Рисование и черчение электрических схем онлайн: лучшие программы
 Как построить развертку в компас
Как построить развертку в компас