Pop Hi-Tech
Итак, вы решили изучать программирование ПЛК (Программируемых Логических Контроллеров). С чего стоит начать изучение программирования контроллеров? Какие учебные материалы искать, стоит ли заниматься этим самостоятельно или лучше пойти на курсы, сколько времени займёт обучение и насколько оно будет сложным? Доступно ли программирование ПЛК всем или для этого нужно быть программистом? Как быстро стоит переходить от теории к практике? Мы подготовили ответы на эти и другие вопросы.
1. Для того чтобы начать изучать программирование ПЛК, быть программистом вовсе не обязательно. Достаточно иметь так называемый логический склад ума. Если вы любили математику и информатику в школе — скорее всего, у вас всё получится. 2. Однако определённые навыки и понимание машинной логики все же необходимы. Если вы изучали в школе или институте основы программирование на Паскале, Бейсике или Ассемблере — это значительный плюс. 3. Первые шаги в программировании ПЛК можно и даже лучше всего делать самостоятельно, это позволит изучить основы в комфортном для себя темпе. Учебных материалов о ПЛК и их программировании достаточно много в интернете, а приблизительный план для самостоятельного обучения вы можете найти в этой статье. 4
А вот сразу после изучения основ следует обратить своё внимание на профессиональные курсы и руководства. От своего имени особо рекомендуем видеокурс по Simatic Step 7, который можно купить на сайте https://step7-kurs.ru
Этот курс как нельзя лучше подходит для новичков, в то же время Simatic Step 7 используется для разработки систем автоматизации для ПЛК Simatic — одних из самых популярных и востребованных на сегодня контроллеров. 5. После того как вы сделаете свои первые шаги step 7 — милости просим на специализированные форумы: здесь вы сможете не только «задачки порешать», но и уже начинать подыскивать работу или стажировку. 6. Время, необходимое для изучения программирования ПЛК, — параметр индивидуальный. Однако в любом случае это займёт у вас гораздо меньше времени, чем попытки освоить Java или C#.
Темы, которые стоит изучить самостоятельно до того, как вы приступите к изучению профессиональных курсов (т. е. на этапе самообучения):
1. Требования техники безопасности при работе с ПЛК. Хотя в начале обучения вам, возможно, будет казаться, что эта тема вам не нужна — все же потратьте некоторое время и изучите ТБ работы с ПЛК. Пригодится обязательно. 2. Назначение, функции, принципы работы и конструкция ПЛК. Условия, в которых работают ПЛК и требования к ним. Если вы раньше занимались радиотехническим конструированием — эта тема не составит для вас особого труда. 3. История ПЛК. Необязательная, но весьма интересная часть. 4. Знакомство с основными языками программирования ПЛК согласно стандарту МЭК-61131-3: Sequential Function Chart (SFC), Function Block Diagram (FBD), Ladder Diagrams (LАD), Statement List (STL), Instruction List (IL). 5. Знакомство со средой разработки, лучше всего — с двумя-тремя наиболее популярными. Например, это могут быть CoDeSys и Simatic Step 7. 6. Изучение методики программирования ПЛК. Структуризация программы, вызов подпрограмм, задание циклов и времени работы программы. 7. Основные команды (операторы). К этому моменту вы уже должны были определиться с языком программирования и средой разработки, наиболее симпатичной лично вам. 8. Функции и функциональные блоки. 9.Примеры кода работающих программ. 10. Практикум. При написании собственных программ переходите от элементарных задач к более сложным. На этом этапе нет ничего плохого в том, чтобы использоваться в своих программах части чужого кода, однако старайтесь со временем уменьшать их количество (в процентном выражении).
Ступенька за ступенькой
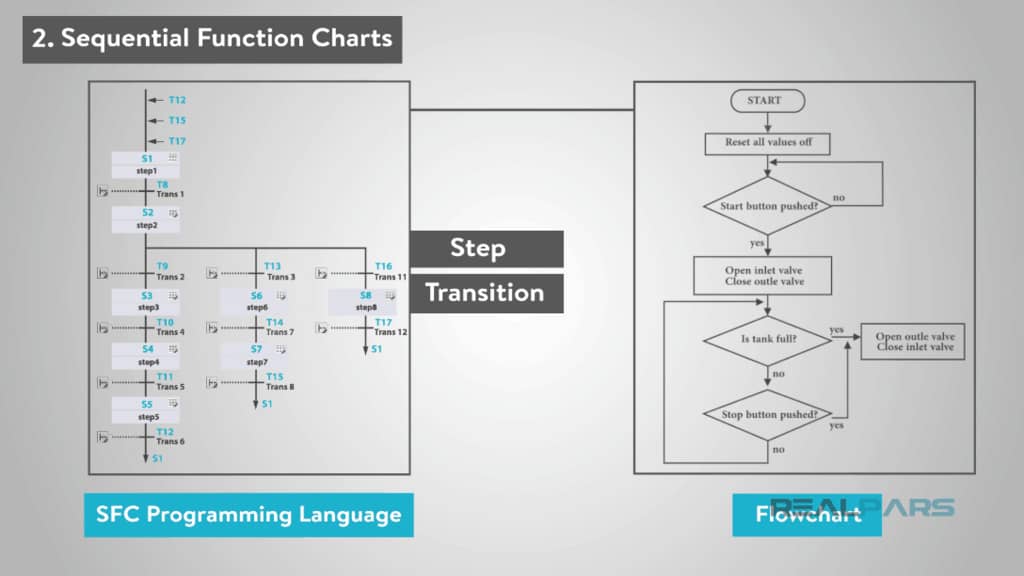
У специалистов по системам управления есть свои традиции. Нет ни одного инженера или технического специалиста, не знакомого с одним из самых первых и долгоживущих языков программирования для ПЛК — старыми добрыми многоступенчатыми схемами. Прочно занявшие лидерство со времен релейно-контактной логики, многоступенчатые схемы снова получили подавляющее число голосов в опросе 2005 года (смотри соответствующую диаграмму). Немногое изменилось по сравнению с 2004 годом, и даже с более ранними опросами. Тремя лидирующими языками программирования для ПЛК продолжают оставаться многоступенчатые схемы, функциональные блоки и последовательные структурные схемы. Изменения в нижней части списка коснулись языка С и наборов инструкций — их показатели возросли.
По словам Джо Рубино (Joe Rubino), менеджера по продажам ПЛК в компании Omron Corp., многоступенчатые схемы, похоже, будут сохранять лидерство в течении еще некоторого времени. «Спрос на программирование при помощи многоступенчатых схем вызван необходимостью поддержки имеющегося производственного оборудования. Внутренний рынок поставщиков ПЛК прочно связался с многоступенчатыми схемами в процессе перехода с устаревших панелей управления, использующих релейно-контактную логику, на программируемые логические контроллеры. Многоступенчатые диаграммы, имитирующие проводные соединения устаревших релейных панелей, обеспечили наиболее эффективный метод перехода. Благодаря этому, значительно улучшилась кривая обучения работе с ПЛК. Персонал, ранее занимавшийся обслуживанием релейных панелей, может разрабатывать и поддерживать привычные схемы панелей, реализованные в виде электронных ПЛК”,- объясняет Рубино.
По мнению Omron, может ли другой язык программирования со временем вытеснить многоступенчатые схемы? «Нет, — отвечает Рубино, — мы считаем, что функциональные блоки и последовательные структурные схемы останутся дополнительными средствами программирования ПЛК и не вытеснят многоступенчатые диаграммы
Важно предоставить гибкость методов создания управляющего кода»
В общих чертах о CoDeSyS 3.5
Среда разработки является продуктом 3S-Smart Software. CoDeSyS-это аппаратно-независимая система для программирования ПЛК. Она поддерживает все языки стандарта МЭК. Сочетает в себе объектно-ориентированное программирование(то есть с помощью визуальных функциональных блоков). Возможна работа с несколькими устройствами и приложениями.
- Добавилось очень много полезных функций (в основном, касающиеся визуализации);
- Рабочее окно среды разработки стало гораздо удобнее;
- Существуют готовые библиотеки модулей ввода-вывода;
- Возможность Веб-визуализации;
- Ну и конечно самый главный козырь, это сама визуализация;
Мне, честно говоря, нравится работать в двух версиях, и в CoDeSyS 2.3, и в 3.5. Каждая по-своему удобна. Единственный недостаток новой среды заключается в том, что она в постоянной разработке, то есть всё время обновляется. И периодически при компиляции возникает куча ошибок, с которыми иногда невозможно разобраться.
Какое оборудование поддерживает CoDeSyS 3.5? Из отечественных контроллеров я знаю СПК сотой и двухсотой серии, ПЛК 323 и ПЛК304. Из «Буржуйских» мне известно о WAGO и Berghof.
На самом деле, работать в этой среде разработки сложно. Очень много нюансов. Каждый новый проект у меня начинается с самого начала.
Для изучения требуется перелопатить кучу инструкций и помучить ребят из тех. поддержки компании ОВЕН. В следующих своих статьях я ознакомлю вас со многими фишками, если будет кому интересно.
Принцип работы ПЛК
ПЛК предназначены для автоматического управления дискретными и непрерывными технологическими процессами.
Основные принципы работы ПЛК:
- Цикличность
- Работа в реальном масштабе времени, обработка прерываний
Цикличность работы ПЛК
В одном цикле ПЛК последовательно выполняет следующие задачи:
- Самодиагностика
- Опрос датчиков, сбор данных о текущем состоянии технологического процесса
- Обмен данными с другими ПЛК, промышленными компьютерами и системами человеко-машинного интерфейса (HMI)
- Обработка полученных данных по заданной программе
- Формирование сигналов управления исполнительными устройствами
Время цикла
Время выполнения одного цикла программы зависит от:
- размера программы
- количества удалённых входов-выходов
- скорости обмена данными с распределённой периферией
- быстродействия ЦПУ
Время цикла (время квантования) должно быть настолько маленьким, чтобы ПЛК успевал за скоростью изменения переменных процесса (см. теорию автоматического управления),
в противном случае процесс станет неуправляемым.
Watchdog
Строжевой таймер следит за тем, чтобы время цикла не превышало заданное.
Обработка прерываний
По прерываниям ПЛК запускает специальные программы обработки прерываний.
Типы прерываний:
- Циклические прерывания по времени (например, каждые 5 секунд)
- Прерывание по дискретному входу (например, по сработке концевика)
- Прерывания по программным и коммуникационным ошибкам, превышению времени цикла, неисправностям модулей, обрывам контуров
Модули ПЛК
- Корзина для установки модулей
- Стабилизированный блок питания AC/DC (~220В/=24В)
- Центральное процессорное устройство (ЦПУ) с интерфейсом для подключения программатора,
переключателем режимов работы, индикацией статуса, оперативной (рабочей) памятью, постоянной памятью для хранения программ и блоков данных - Интерфейсные модули для подключения корзин расширения локального ввода-вывода и распределённой периферии
- Коммуникационные модули для обмена данными с другими контроллерами и промышленными компьютерами
- Модули ввода-вывода
- Прикладные модули (синхронизация, позиционирование, взвешивание и т.п.)
Функции устройств ввода
- Электрическое подключение и питание технологических датчиков (дискретных и аналоговых)
- Диагностика состояния (обрыв провода, контроль граничных значений, короткое замыкание и т.п.)
- Формирование цифровых значений (машинных слов) технологических параметров
- Передача этих данных в память ПЛК для дальнейшей обработки
Функции устройств вывода
- Электрическое подключение исполнительных устройств
- Диагностика состояния (обрыв провода, контроль граничных значений, короткое замыкание и т.п.)
- Приём управляющих машинных слов из памяти ПЛК
- Формирование управляющих сигналов (дискретных и аналоговых)
Типы устройств ввода-вывода
- Модули локального ввода-вывода располагаются:
- в одной корзине с ЦПУ
- в соседних корзинах в одном шкафу с ЦПУ
- в корзинах в соседних шкафах в одном помещении с ЦПУ
- Модули распределённого ввода-вывода (децентрализованная периферия) располагаются удалённо (в другом здании или в поле по по месту управления)
и связываются с ЦПУ по промышленной полевой шине. Станции удалённого ввода-вывода могут иметь взрывозащищённое исполнение или повышенный
класс защиты корпуса (например, IP67) и устанавливаться без шкафа
Функции коммуникационных модулей
Коммуникационные модули предназначены для обмена данными:
- с удалёнными модулями ввода-вывода (Profibus, Modbus и др.)
- с программаторами, панелями оператора (HMI) и другими контроллерами
- с полевыми устройствами (HART, Foundation Fieldbus и др.)
- с сервоприводами (SERCOS)
- с промышленными компьютерами верхнего уровня (Industrial Ethernet и др.)
- по радиоканалам (GSM, GPRS)
- по телефонным линиям
- по Internet (встроенные web-серверы публикуют на своих страницах статусную информацию)
ПЛК3000
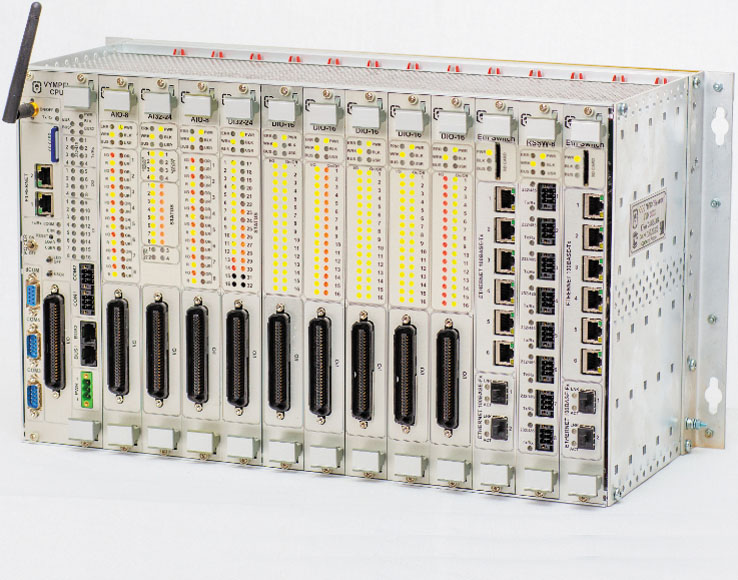
Рис. 6. Внешний вид ПЛК3000
НПО «Вымпел» (Саратов), ведущий отечественный разработчик и производитель средств автоматизации объектов добычи, транспорта и распределения в нефтегазовой отрасли, разработал и успешно использует ПЛК3000 (рис. 6) с поддержкой ISaGRAF. Комплексное решение ISaGRAF+ПЛК3000 внедрено в системе автоматического управления технологическими скважинами 1Т и 2Т Калининградского УПХГ ООО «Газпром ПХГ» и контролируемом пункте кранового узла № 91 системы линейной телемеханики магистрального газопровода Бухара — Урал (Челябинское ЛПУМГ ООО «Газпром Трансгаз Екатеринбург»). Результат сотрудничества НПО «Вымпел» и компании «ФИОРД» — это возможность применения данного устройства в проектах высокой степени сложности и ответственности. ПЛК3000 выполняет функции контроля и управления локальным оборудованием, связи с уровнем диспетчерского управления и с другими функциональными узлами.
Основные преимущества ПЛК3000:
- Сверхнизкое потребление электроэнергии, возможность гибкого управления питанием компонентов системы.
- Модульная конструкция, максимальная адаптация аппаратуры для создания систем автоматизации различной сложности.
- Использование инструментальной системы программирования ISAGRAF с поддержкой языков стандарта МЭК 61131-3.
- Высокая информационная емкость.
- Конструкция контроллера обеспечивает естественное охлаждение элементов модулей.
- Широкий температурный диапазон работы: от –60 до +60 °C.
- Защита от аварий.
- Поддержка защищенного обмена данными через промышленные сети и Интернет.
Один крейт ПЛК3000 позволяет использовать до 592 линий дискретного ввода/вывода, до 288 линий аналогового ввода/вывода, до 100 линий последовательных интерфейсов RS-232/RS-485, до 74 Ethernet-каналов типа «витая пара», до 24 оптоволоконных каналов Ethernet. Крейт ПЛК3000 соответствует стандарту «Евромеханика». Высота поддерживаемых модулей — 6U (233,35 мм). Ширина поддерживаемых модулей достигает 6ТН (30,48 мм). Ширина поддерживаемых базовых модулей соответствует двойному шагу (60,96 мм). Можно проектировать контроллеры, имеющие в своем составе до трех крейтов.
Обновление программного обеспечения ПЛК3000 осуществляется с помощью набора отладочных интерфейсов, содержащего отладочный RS-232, Ethernet, Wi-Fi (режим ad-hoc). Контроллер ПЛК3000 поддерживает следующие информационные протоколы для различных коммуникационных интерфейсов: TCP, UDP, IP, PPP, NTP, DHCP, Modbus RTU, МЭК 60870-5-101/104.
Все модули поддерживают режим «блокировка», при котором все выходы модулей принимают заранее определенное состояние в случае подачи определенного сигнала блокировки. Изделие обеспечивает различные режимы энергосбережения: отключение незадействованных компонентов, уменьшение производительности с целью снижения энергопотребления, режимы сна.
Все включено!
Сегодня мы выделяем несколько ключевых тенденций, определяющих развитие контроллеров. Прежде всего, это наличие у фирмы поставщика широкой линейки ПЛК различных классов (от Micro до Large) с единой системой программирования. Такой подход дает проектировщику АСУТП возможность выбрать необходимое контроллерное оборудование «из одних рук» и получить гарантии, что вся техника будет программно и аппаратно совместимой. Единообразие программной и аппаратной платформы также сократит издержки на освоение новой техники.
Другая ярко выраженная тенденция — это увеличение спроса на компактные недорогие контроллеры для решения таких задач, как автоматизация отдельных агрегатов, учет энергоресурсов, мониторинг и диспетчеризация территориально распределенных промышленных объектов и объектов ЖКХ: тепловых пунктов, котельных, насосных станций, газораспределительных пунктов и трансформаторных подстанций.
В классе «тяжелых», традиционно популярных в России контроллеров, востребованы резервированные структуры с развитой диагностикой и мощные процессоры, снимающие ограничения на масштаб проекта и сложность технологических алгоритмов. Доля «большой» автоматизации еще долгое время будет значительной в силу сырьевого характера нашей экономики.
Программирование ПЛК лестничной логики
До того. Как программируемые логические контроллеры стали популярными. Релейное управление было нормой на большинстве производственных площадок. Реле управляли нагрузками на основе простой логики, которая была реализована через физическую проводку устройств. Проводка этих устройств была указана в электрических чертежах, которые предполагали компоновку, напоминающую лестницу. По мере того как самые основные ПЛК были введены в поле. Программирование ПЛК лестничной логики было разработано для имитации компоновки релейных цепей. Другими словами. Лестничная логика была одним из первых языков программирования ПЛК. Который все еще используется сегодня из-за простоты.
Языки программирования ПЛК — Схемы ПЛК. Ведущие к лестничной логике Программирование ПЛК
С момента своего создания лестничная логика значительно эволюционировала. Однако основные принципы работы остаются прежними. Лестничная логика программирования ПЛК оценивает каждую ступеньку лестницы в последовательном порядке. Оценивает условные инструкции. И если результат оценивается как “ИСТИННЫЙ”. Выходные инструкции выполняются.
Языки программирования ПЛК | Лестничная логика Пример программирования ПЛК в RSLogix 5000
Преимущества программирования ПЛК лестничной логики
-
Простая в реализации и устранении неполадок | Лестничная логика-это визуальный язык. Который обеспечивает подтверждение состояния большинства инструкций.
Другими словами, человеку, мало знакомому с конкретным процессом, легко пройти через программу и понять ее логику.
- Модульная конструкция | Лестничная логика может быть легко модифицирована путем сложения или вычитания логики. Каждая ступенька является отдельным условием и может быть удалена или добавлена по мере необходимости.
-
Устойчивость и согласованность | Лестничная логика позволяют пользователю реализовать множество функций. Однако язык сильно стандартизирован и не дает полной гибкости. Таким образом сохраняя согласованность кода между различными реализациями.
Недостатки лестничной логики
- Крутая кривая обучения | Лестничная логика-это простой язык, но не очень интуитивно понятный для тех. Кто имеет опыт работы на C, C++. Java или Python. Тем не менее, это может быть проще понять для инженеров-электриков и тех. Кто имеет базовые знания по программированию сборки.
-
Медленное развертывание | Из-за визуальной природы лестничной логики программисту требуется больше времени. Чтобы создать логику. Которую он себе представлял. Существует необходимость перетаскивать элементы. Которые замедляют процесс разработки по сравнению с другими современными языками программирования.
- Неинтуитивная для сложных приложений | Лестничная логика сияет, когда дело доходит до последовательных булевых задач. Однако когда речь заходит о современной теории управления, которая включает в себя ПИД, управление потоком. Аналоговые датчики и контуры обратной связи. Ее не всегда легко реализовать и расшифровать.
Лестничная логика-самый распространенный язык программирования ПЛК во всем мире. Это легко работать и поддерживать для тех. Кто не имеет постоянного воздействия программирования ПЛК. Мы рекомендуем вам начать свое путешествие по программированию ПЛК с изучения лестничной логики.
Необходимое программное обеспечение и оборудование
В принципе я чаще всего применяю контроллеры компании ОВЕН — ПЛК100/150/154, ПЛК63/73, ПЛК110/160.
Насколько я помню, CoDeSyS применяют WAGO, Emko, Raspberry PI, и по-моему некоторые контроллеры ABB.
Итак, что нам нужно, чтобы начать работать:
- Среда программирования CoDeSyS;
- Необходимые библиотеки для среды программирования;
- Target-файл под ваше оборудование.
Более развернутый список контроллеров на CoDeSyS.
Отечественные ПЛК:
- Овен ПЛК
- Фаствел Fastwel IO
- СКБ ПСИС CP6000 (psisCON)
- НИЛ АП NLcon-CE
- Раскат S-7188 microPLC, модуль 4S-PLCcore
- ПРОЛОГ МСТС
- ЭРГОС ТРС (Робот)
- АРКТУР КЭП-1
- ОАО Автоматика УЗС-К
Зарубежные ПЛК, применяемые в России:
- Beckoff
- Kontron
- WagoIO
- Moeller, система программирования Xsoft
- Festo
- Панельные ПЛК Berghof
- Mitsubishi топ модель System Q
- HollySyS
Особенности работы и программирования ПЛК
Теперь, когда стали более понятными основные возможности ПЛК, следует выяснить способы их применения.
Система программирования является одной из примечательных и полезных особенностей ПЛК, она обеспечивает упрощенный подход к разработке управляющих программ для специалистов различного профиля.
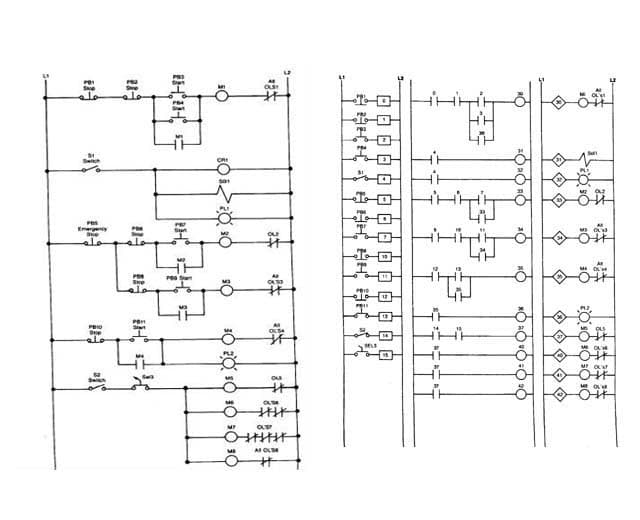
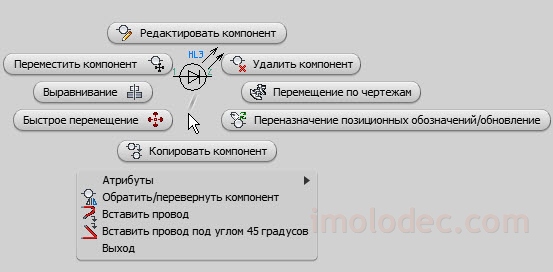
Именно в ПЛК впервые появилась удобная возможность программирования контроллеров путем составления на экране компьютера визуальных цепей из релейных контактов для описания операторов программы (рисунок 6). Таким образом, даже весьма далекие от программирования инженеры-технологи быстро осваивают новую для себя профессию. Подобное программирование называют языком релейной логики или Ladder Diagram (LD или LAD). Задачи, решаемые при этом ПЛК, значительно расширяются за счет применения в программе функций счетчиков, таймеров и других логических блоков.
Рис. 6. Пример программной реализации электрической цепи
Задача программирования ПЛК еще более упрощается благодаря наличию пяти языков, стандартизованных для всех платформ ПЛК. Три графических и два текстовых языка программирования взаимно совместимы. При этом одна часть программы может создаваться на одном языке, а другая — на другом, более удобном для нее.
К графическим средствам программирования ПЛК относятся язык последовательных функциональных блоков (Sequential Function Chart, SFC) и язык функциональных блоковых диаграмм (Function Block Diagram, FBD), более понятные для технологов. Для программистов более привычными являются язык структурированного текста (Statement List, STL), напоминающий Паскаль, и язык инструкций (Instruction List, IL), похожий на типичный Ассемблер.
Конечно, простота программирования ПЛК является относительной. Если с программированием небольшого устройства может после обучения справиться практически любой инженер, знакомый с элементарной логикой, то создание сложных программ потребует знания основ профессии программиста и специальных познаний в программировании ПЛК.
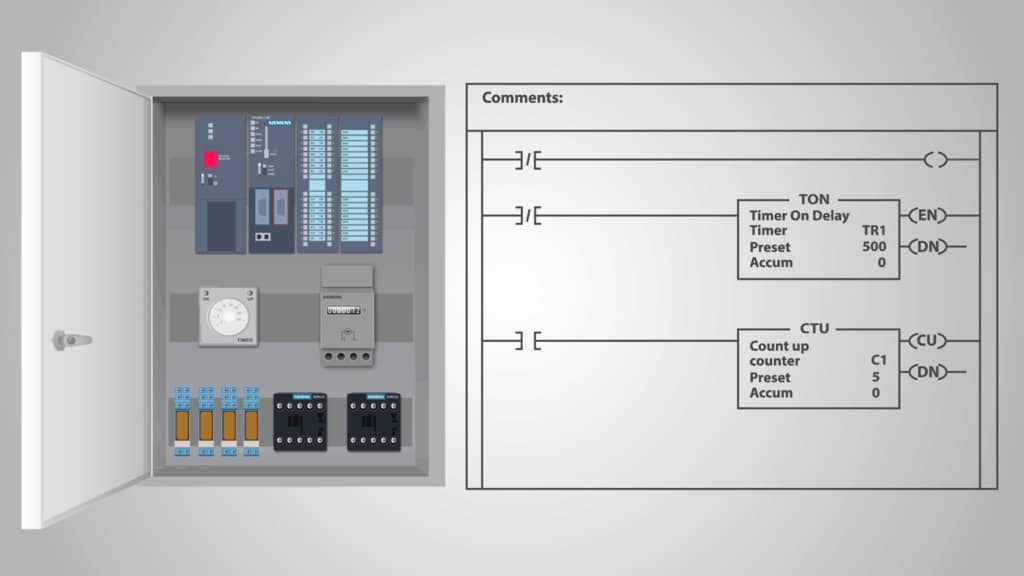
Упростить создание программного обеспечения для современных ПЛК позволяют специальные комплексы, такие как
(рисунок 7), ISaGRAF, OpenPCS и другие инструменты, не привязанные к какой-либо аппаратной платформе ПЛК и содержащие все необходимое для автоматизации труда программиста. Для отладки сложных проектов на основе компонентов TI компания предлагает специальные отладочные комплекты и необходимое программное обеспечение.
Рис. 7. Рабочий экран программирования в среде CoDeSys
Перед началом работы ПЛК выполняет первичное тестирование оборудования и загрузку в ОЗУ и ПЗУ операционной системы и рабочей программы пользователя. Стандартный ПЛК кроме рабочего режима имеет режим отладки с пошаговым выполнением программы, с возможностью просмотра и редактирования значений переменных.
Рабочий режим ПЛК состоит из повторяющихся однотипных циклов, каждый из них включает три этапа:
- опрос всех датчиков с регистрацией их состояния в оперативной памяти;
- последовательный анализ рабочей программы с использованием данных о текущем состоянии датчиков и с формированием управляющих воздействий, которые записываются в буферные регистры;
- одновременное обновление контроллером состояния всех своих выходов и начало очередного этапа опроса датчиков.
Процесс исполнения программы ПЛК можно контролировать на экране подключенного компьютера с отображением состояния отдельных параметров. Например, процедуры включения и выключения насоса могут меняться в зависимости от требуемой задержки, значение которой задается специальной переменной.
При необходимости можно остановить выполнение программы и перевести ПЛК в режим программирования, затем на экране компьютера изменить ход выполнения программы или отдельные параметры и снова записать их в память ПЛК.
Программирование без программиста
Одной из базовых идей, лежащих в основе использования ПЛК, является упрощение системы программирования и повышение наглядности языковых средств до уровня, доступного для понимания техническому специалисту хорошо знающему и непосредственно эксплуатирующему оборудование, но не обладающему специальными знаниями в области разработки программного обеспечения.
Такой специалист, получив простой и понятный инструмент выражения своих знаний об алгоритмах управления процессами, находящимися в его ведении, во многих случаях будет способен самостоятельно реализовать и отладить программу ПЛК, а при необходимости перенастроить параметры работы оборудования и своевременно изменить программу управления.
Зачастую качество программы ПЛК созданной таким специалистом оказывается выше, чем программы, написанной по его заданию профессиональным программистом не знакомым со всеми особенностями работы автоматизируемого процесса.
Требования, ограничения и проблемы при проектировании и производстве ПЛК
Таким образом, становится понятно, что ПЛК — это просто особым образом спроектированная цифровая система управления на основе процессоров разной мощности и с различной функциональной оснащенностью, в зависимости от предназначения. Такую систему можно также считать специализированным мини-компьютером. Причем она изначально ориентирована на эксплуатацию в цехах промышленных предприятий, где имеется множество источников электромагнитных помех, а температура может быть как положительной, так и отрицательной. Дополнительно к минимизации воздействия вышеуказанных факторов необходимо предусмотреть и защиту от агрессивной внешней среды, включающей пыль, брызги технологических жидкостей и паровоздушные взвеси. В таких случаях предусмотрена установка ПЛК в защитные шкафы или в удаленных помещениях. Отдельные модули могут размещаться на удалении до сотен метров от основного комплекта ПЛК и эксплуатироваться при экстремальных внешних температурах. Согласно МЭК 61131, для ПЛК с наружной установкой допустима температура 5…55°C. Для устанавливаемого в закрытых шкафах ПЛК необходимо обеспечить рабочий диапазон 5…40°C при относительной влажности 10…95% (без образования конденсата).
Тип ПЛК выбирается при проектировании системы управления и зависит от поставленных задач и условий производства. В отдельных случаях это может быть моноблочный ПЛК с ограниченными функциями, имеющий достаточное количество входов и выходов. В других условиях потребуются ПЛК с расширенными возможностями, позволяющими использовать распределенную конфигурацию с удаленными модулями входа/выхода и с удаленными пультами управления технологическим процессом.
Связь между удаленными блоками и основным ядром ПЛК осуществляется через помехозащищенные полевые шины по медным кабелям и оптическим линиям связи. В отдельных случаях, например, для связи с подвижными объектами, применяют беспроводные технологии, чаще всего это сети и каналы Wi-Fi. Для взаимодействия с другими ПЛК могут применяться как широко известные интерфейсы RS-232 и RS-485, так и более помехозащищенные промышленные варианты типа Profibus и CAN.
Верховный суд Российской Федерации
Верховный Суд Российской Федерации является высшим судебным органом по гражданским делам, разрешению экономических споров, уголовным, административным делам и иным делам, подсудным судам общей юрисдикции.
Федеральный конституционный закон «О Верховном Суде Российской Федерации» содержит следующие полномочия суда:
- судебный надзор за деятельностью судов общей юрисдикции, включая военные суды;
- в пределах своей компетенции рассмотрение дела в качестве суда апелляционной и кассационной инстанций, в порядке надзора и по вновь открывшимся обстоятельствам, а в случаях, предусмотренных законом, — также и в качестве суда первой инстанции;
- непосредственно вышестоящая судебная инстанция по отношению к верховным судам республик, краевым и областным судам, судам городов федерального значения (Москва, Санкт-Петербург и Севастополь), судам автономной области и автономных округов, окружным и флотским военным судам;
- изучение и обобщение судебной практики, анализ судебной статистики и разъяснение по вопросам судебной практики;
- разрешение в пределах своих полномочий вопросы, вытекающие из международных договоров Российской Федерации, СССР и РСФСР.
Верховный Суд издает «Бюллетень Верховного Суда Российской Федерации», в котором публикуются решения по гражданским и уголовным делам, обзоры судебной практики, аналитические материалы и статистические данные о работе судов общей юрисдикции и др. материалы.
Это интересно: Автомобиль в мегаполисе — поясняем во всех подробностях
Похожие записи:
 Что такое варистор, основные технические параметры, для чего используется
Что такое варистор, основные технические параметры, для чего используется
 Как проверить полевой моп (mosfet) — транзистор цифровым мультиметром
Как проверить полевой моп (mosfet) — транзистор цифровым мультиметром
 Возможности autocad electrical
Возможности autocad electrical
 Реле нормально разомкнутое 220
Реле нормально разомкнутое 220
 Стабилизированный регулятор мощности паяльника на микроконтроллере
Стабилизированный регулятор мощности паяльника на микроконтроллере
 Правильный монтаж сип кабеля: как выполняется и что для этого нужно
Правильный монтаж сип кабеля: как выполняется и что для этого нужно