Процесс переделывания в генератор
Алгоритм последовательности действий следующий:
Ротор изымается после снятия крышки;
Остаются прежние статорные обмотки, не осуществляется перемотка;
Для того чтобы он стал сборным в отличие от своего изначального цельного состояния, его надо стачивать до заранее оговоренного размера;
На ротор запрессовывается стакан из стали толщиной пять миллиметров;
Одной из наиболее сложных операций считается разметка, которая проводится для того, чтобы приклеить магнитные элементы на ротор согласно шаблону
Размерность индивидуально подбирается под каждый двигательный агрегат;
Магнитные элементы из неодима клеят суперклеем и укрепляются дополнительно нитяной капроновой сеткой;
Все обматывается при помощи скотча и проводится опалубка для герметизации, а затем заливка эпоксидкой;
Стекая вниз, смола застывает, после чего скотч необходимо снять;
Ротор загоняется в генераторную часть со всеми предосторожностями, чтобы ротор «встал», а не «влетел» в статор благодаря силе магнитов;
Конструкция собирается и закрывается крышкой;
Проводится проверка работоспособности при помощи дрели.

Особенности выбора электродвигателей
При выборе электродвигателей для конкретных целей необходимо учитывать:
– электромеханические параметры электродвигателей (номинальные напряжение и мощность, напряжение, продолжительность работы, частоту вращения и др.) и в первую очередь они должны соответствовать параметрам тех механизмов, в которых они будут использованы;
– если выбирается электродвигатель для механизмов, где не нужна регулировка частоты вращения, то обычно применяются синхронные или асинхронные электродвигатели с короткозамкнутым ротором. Для приводов механизмов, у которых тяжелые условия работы или пуска либо требуется изменение частоты вращения, необходимо выбирать двигатели с максимально возможно простыми методами пуска и регулирования частоты вращения для данной обстановки;
– для двигателей, работающих в сырых и влажных условиях, должна быть использована влагостойкая изоляция, рассчитанная на воздействие пыли и влаги, а исполнение двигателя должно быть не менее IP43;
– если планируется применение электродвигателя в местах с химически активными парами или газами, то такие двигатели должны иметь исполнение не менее IP44 или быть с подводом и продувом чистым воздухом;
– при выборе электродвигателя необходимо учитывать возможность его ремонта.
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
Иногда, в моей практике приходилось сталкиваться с одной проблемой, связанной с асинхронными электродвигателями — как определить количество оборотов ротора электродвигателя, если нет бирки и технической документации на электромотор?
Вопрос, на самом деле, решается просто — обороты можно определить по катушкам обмотки статора асинхронного электродвигателя.
Кто открыл электрический двигатель
В 21-ом веке электродвигатели имеют особое место в нашей жизни. Они находятся почти во всех технических агрегатах, которые мы видим каждый день, будь то пылесос, стиральная машина, система вентиляции
Это безусловно очень важное достижения прогресса, которое появилось в середине 19-го века, и было предвестником индустриальной эры. Электродвигатель был создан в 1834 году Борисом Якоби, русским пионером электротехники, и после некоторых усовершенствований в 1838 году был установлен на лодке, которая могла с его помощью перемещаться по реке со скоростью около 4 км\ч
Но несмотря на это изобретение, электродвигатели не могли найти массового применения, до того момента, пока не был создан электрический генератор, поскольку осуществлять их питание от батареи было крайне неудобно. Первый двигатель переменного тока был сконструирован и создан Чарльзом Уитстоном в 1841 году. Началом применения переменного тока для электродвигателей принято считать 1889 год, когда инженер Доливо- Добровольский сконструировал первый трехфазный асинхронный двигатель. Первая линия трехфазного переменного тока была создана в 1891 году. Результаты использования этой линии доказали физическую возможность применения трехфазного тока, для передачи больших объемов электроэнергии с высокими показателями КПД. К началу 20-го века появились прототипы основных электромашин.
Именно с того времени началось быстрое развитие электрификации промышленных предприятий и транспорта. Одновременно с этим появляются первые турбогенераторы. Это дает толчок к увеличению мощности генераторов. Для сравнения в 1900 году пиковая мощность генератора составляла 5кВт, а в 1920 году эта величина составляла 60 тысяч кВт. Создание водного охлаждения позволило создать турбогенераторы мощностью около 550 тысяч кВт.
На данный момент электродвигатели имеют следующие характеристики. Максимальная мощность. Она как принято в физике измеряется в Ваттах. Этот параметр зависит от конструкции, материала изготовления, и технологии создания. Несколько двигателей имеющие одинаковую массу и размер могут иметь различную мощность исключительно из-за технологии производства. Как правило, именно этот параметр задает ценовую категорию для двигателя. Далее рассматривают номинальное напряжение и ток, а так же сопротивление обмотки, как вы знаете, эти параметры неизменно влияют друг на друга. При более низком сопротивлении, возрастает максимальное значение ампер. Третьей характеристикой являются номинальные обороты в минуту. Конструкция современного двигателя направлена на получение более высоких оборотов, или же наивысшего момента на валу. Следовательно, двигатель с большим диаметром имеет увеличенный высокий момент и уменьшенные обороты.
Большинство двигателей формируют два магнитных поля, переменное и неподвижное, при этом неподвижное производят постоянные магниты, в то время как переменное создается обмоткой. Неподвижное поле работает по базовым определениям механики, магнит имеет два полюса, северный и как положено южный, противоположные полюса имеют притяжение, одинаковые притягиваются и вследствие этого создается сила взаимодействия. Но для того, чтоб двигатель начал свое вращение требуется менять эти направления. Соответственно, в реальности вращение происходит из-за изменения этих параметров, полюс притягивается, полюс отталкивается. Таков основной принцип действия электродвигателя.
Источник
https://youtube.com/watch?v=uXvUPCnKeC8
Электродвигатель

Давайте подвесим между полюсами неподвижного магнита проволочную петлю, через которую пропустим электрический ток. Мы увидим, что петля начнет отклоняться в сторону, чтобы выйти из магнитного поля. Именно это явление положено в основу всех электродвигателей. Главными частями электродвигателя являются: ротор и статор. Статор является неподвижной частью электродвигателя, служит магнитопроводом, в котором образуется магнитное поле. Подвижной вращающейся частью электродвигателя является ротор, на нем помещены витки провода, по которому пропускают электрический ток. Майкл Фарадей Двигатели, работающие от сети постоянного тока, являются двигателями постоянного тока. Двигатели, работающие от источника переменного тока, называются двигателями переменного тока. В результате проведенных экспериментов выдающийся английский физик Майкл Фарадей доказал, что при перемещении проводника в магнитном поле, можно создавать электрический ток индукционным методом. Так, в 1831 году было открыто явление электромагнитной индукции. Сразу же ученые и изобретатели нескольких стран взялись за разработку электродвигателя, пригодного для практики.
Первый электродвигатель постоянного тока Б.С. Якоби
Первыми были созданы электродвигатели постоянного тока, так как источники постоянного тока (батарея и гальванические элементы) были изобретены раньше. В 1834 году русским ученым Б. С. Якоби был создан первый электродвигатель, который состоял из двух частей — неподвижной и вращающейся. Благодаря изобретению был открыт принцип непрерывного вращательного движения. Мощность электродвигателя равнялась 15 Вт, источником тока были гальванические батареи. Однако практического применения электродвигатель не имел. В 1838 году Б. С. Якоби создал первый электродвигатель постоянного тока пригодный для практических целей. Мощность была увеличена за счет соединенных на одной плоскости 40 двигателей. Двигатель использовали для привода гребного вала лодки. 13 сентября 1838 года двигатель был установлен на лодке, в которой находилось 12 пассажиров. Испытания прошли весьма успешно. За 7 часов лодка проделала путь в 7 км со скоростью 2 км/ч. В сентябре 1839 года на катер с 14 пассажирами был установлен двигатель усовершенствованной конструкции, большей мощности, скорость которого составляла 4 км/ч. Двигатель Якоби стал самым надежным и мощным из всех конструкций, созданных на тот момент. К 70-м годам XIX столетия электродвигатель был полностью усовершенствован и сохранился в таком виде до наших дней.
Со временем в электродвигателях стали использовать электромагниты вместо постоянных магнитов, что позволило существенно увеличить мощность. Принцип работы электродвигателя постоянного тока заключается в следующем: к обмотке электромагнита подводят электрический ток, в результате между его полюсами возникает магнитное поле. Виток провода размещен на роторе. Когда к витку провода через коллектор подводится электрический ток, он начинает вращаться вместе с ротором. Особенностью таких электродвигателей является возможность регулировать частоту вращения ротора. Микроэлектродвигатели используют в электробритвах, системах автоматического регулирования, кофемолках и других приборах быта. Мощные электродвигатели используют для привода подъемных кранов, прокатных станков, на электрофицированном транспорте.
Трехфазный асинхронный электродвигатель
В 1889 году замечательный русский инженер-электротехник М. О. Доливо-Добровольский создал систему трехфазного тока и создал первый трехфазный двигатель переменного тока. Основными частями двигателя переменного тока также являются ротор и статор. В отличие от двигателей постоянного тока они не имеют коллектора, ток на обмотки ротора поступает через контактные кольца. В некоторых двигателях отсутствуют выводы на обмотках для подключения к току, а замкнуты между собой. Внешне ротор был похож на колесо в беличьей клетке и получил название беличьего колеса. Конструкция такого ротора дала возможность уменьшить магнитное и электрическое сопротивление и повысить эффективность работы, без принципиальных изменений она сохранилась до сегодняшних дней. Двигатели переменного тока существуют синхронные и асинхронные. У синхронного двигателя частота вращения магнитного поля, производимая обмотками статора, синхронна с частотой вращения ротора. В асинхронных двигателях частота вращения ротора отстает от частоты вращения магнитного поля статора. Наиболее просты и надежны асинхронные двигатели. Они получили широкое распространение.
Общая характеристика общепромышленных трехфазных двигателей
Асинхронные трехфазные электродвигатели представляют собой устойчивую конструкцию, которая разработана с целью подачи высоких уровней мощности, показывая продуктивную работу. Чаще всего такие модели комплектуются короткозамкнутым ротором, что позволяет двигателям функционировать даже при значительных перепадах напряжения, а также числа полюсов в магнитном поле. Такое исполнение дает возможность также менять количество полюсов, при необходимости регулировки скоростей вращения.
Сфера применения двигателей достаточно широка, и насчитывает в себе практически все отрасли мелкой и крупной промышленности:
- Промышленные вентиляторы;
- Вентиляционные системы;
- Насосы разнообразной степени мощности;
- Насосные станции;
- Устройства для перекачивания и подъёма воды;
- Компрессоры локального и коллективного использования;
- Конвейерные устройства.
Для более удобной работы электродвигателя, который нужно пристроить к конкретному промышленному агрегату, предусмотрено несколько вариантов исполнения:
- На лапах;
- Фланец;
- Комбинированный.
Модели отечественного или европейского производства должны в любом случае отвечать высоким технологическим стандартам, гарантируя бесперебойное функционирование.
Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
- Электродвигатели постоянного токаИспользуются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
- Электродвигатели переменного токаПользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
- Шаговые электродвигателиДействуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
- СерводвигателиОтносятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
- Линейные электродвигателиОбладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
- Синхронные двигателиЯвляются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
- Асинхронные двигателиТакже, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Категория размещения и климатическое исполнение
Все электродвигатели производят с учетом воздействия во время эксплуатации определенных факторов окружающей среды. По этой причине все электрические машины подразделяют на следующие категории размещения:
- Для помещений с высоким уровнем влажности.
- Для помещений закрытого типа с вентиляцией естественного типа без искусственного регулирования климатических параметров. При этом ограничено воздействие пыли, влаги и УФ- излучения.
- В условиях открытого пространства.
- Для помещений закрытого типа с искусственным регулированием климатических параметров. При этом ограничено воздействие пыли, влаги и УФ-излучения.
- Для помещений с изменением влажности и температуры, которые не отличаются от изменений на улице.
В зависимости от климатического исполнения в соответствии с требованиями ГОСТ 15150 — 69 все электрические двигатели подразделяют на следующие типы исполнения:
- Все возможные макроклиматические районы (В).
- Холодный (ХЛ).
- Все морские районы (ОМ).
- Сухой тропический (ТС).
- Общий (О).
- Умеренный (У).
- Умеренный морской (М).
- Влажный тропический (ТВ).
Категория размещения и климатическое исполнение указывают в условном обозначении электродвигателя на его бирке и в паспорте.
Принцип действия электродвигателей
Индукционные электродвигатели состоят из ротора и статора.
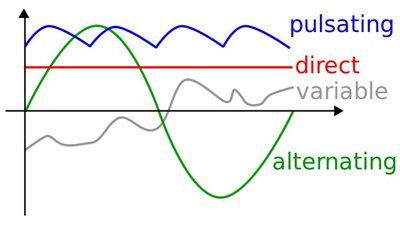
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
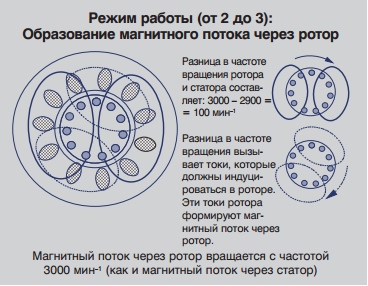
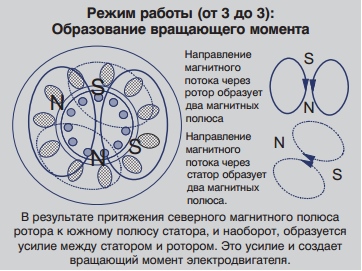
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.

Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина — вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором . В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина — вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов .
Принцип действия асинхронного двигателя
Рассмотрим устройство, показанное на рис. Оно состоит из постоянного магнита 1, медного диска 2, рукоятки 3 и подшипников 4. Если вращать магнит при помощи рукоятки, то медный диск начинает вращаться в ту же сторону, но с меньшей частотой. Медный диск можно рассматривать как бесчисленное множество замкнутых витков; при вращении магнита 1 его магнитные силовые линии (м.с.л.) пересекают витки диска, и в витках наводится электродвижущая Модель асинхронного двигателя
Обозначим:
п, — частота вращения магнита (синхронная частота), об/мин; п2 — частота вращения диска, об/мин; п — разность частот вращения магнита и диска, об/мин.
Частота вращения диска меньше частоты вращения магнита, и, следовательно, диск вращается с несинхронной (асинхронной) частотой. Разница частот магнита и диска представляет собой частоту, с которой м.с.л. пересекают витки диска. Отношение разницы частот к синхронной частоте называется скольжением. Скольжение может быть выражено в долях единицы или в процентах:
В двигателях вращающееся магнитное поле создается трехфазным током, протекающим по обмотке статора, а роль диска выполняет обмотка ротора. Активная сталь статора и ротора служит магнитопроводом, уменьшающим в сотни раз сопротивление магнитному потоку.
Под влиянием подведенного к статору напряжения сети Ul в его обмотке протекает ток I,. Этот ток создает вращающийся магнитный поток Ф, замыкающийся через статор и ротор. Поток создает в обеих обмотках э.д.с. Е{ и Е2, как в первичной и вторичной обмотках трансформатора. Таким образом, асинхронный двигатель подобен трехфазному трансформатору, в котором э.д.с. создаются вращающимся магнитным потоком. Рис. 2 . Работа асинхронного двигателя при cos ф2 = 1
Пусть поток вращается в направлении движения стрелки часов. Под влиянием э.д.с. Е2 в обмотке ротора пойдет ток I2, направление которого показано на рис. 2. Предположим, что он совпадает по фазе с Е2. Взаимодействие тока I2 и потока Ф создает электромагнитные силы F, приводящие ротор во вращение, вслед за вращающимся потоком. Таким образов, асинхронный двигатель представляет собой трансформатор с вращающейся вторичной обмоткой и способный поэтому превращать электрическую мощность E2I2 cos ф в механическую.
Ротор всегда отстает от вращающегося магнитного потока, так как только в этом случае может возникать э.д.с. Е2, а следовательно, ток 12 и силы F. Чтобы изменить направление вращения ротора, следует изменить направление вращения потока. Для этого меняют местами два любых провода, подводящие ток от сети к статору. В этом случае меняется порядок следования фаз ABC на АСВ или ВАС, и поток вращается в обратную сторону.
Ротор двигателя вращается с асинхронной частотой п2, поэтому и двигатель называется асинхронным. Частоту вращения магнитного потока называют синхронной частотой п1. Частота вращенияротора Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска п2 — 0; а если вообразить, что ротор вращается синхронно с потоком, п2 = пх.
Чем больше нагрузка на валу, тем меньше скорость ротора п2 и следовательно больше S, так как больший тормозной момент должен уравновеситься вращающим моментом; последнее возможно только при увеличении Е2 и I2, а значит и S. Скольжение при номинальной нагрузке SH у асинхронных двигателей равно от 1 до 7%; меньшая цифра относится к мощным двигателям.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.
-
Сравнение механических характеристик электродвигателей разных типов при ограниченном токе статора
-
Зависимость мощности от скорости вращения вала для двигателей разных типов при ограниченном токе статора
Примечание:
Оранжевый цвет – низкий показатель, желтый цвет – средний показатель, светло-желтый цвет – высокий показатель.
В соответствии с выше приведенными показателями гибридный синхронный электродвигатель, а именно синхронный реактивный электродвигатель со встроенными постоянными магнитами, является наиболее подходящим для применения в качестве тягового электродвигателя в автомобилестроении (выбор проводился для концепта автомобилей BMW i3 & BMW i8). Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне .