Динамическое торможение асинхронного двигателя
Динамическое торможение АД (торможение постоянным током) осуществляется путем подключения к двум любым обмоткам статора источника постоянного тока. При этом с помощью группы контактов К1 асинхронный двигатель сначала отключают от питания трехфазным переменным током, и только после этого, замыкают группу контактов К2 и подают постоянный ток. Величину постоянного тока регулируют сопротивлением rт (рисунок 1).
Рисунок 1 — Схема динамического торможения асинхронного двигателя
Само динамическое торможение асинхронного двигателя сопровождается следующими процессами и изменениями:
При отключении переменного тока, вращающееся магнитное поле перестает существовать. Далее подключают источник постоянного тока, который создает постоянное магнитное поле. Ротор по инерции продолжает крутиться теперь уже в постоянном магнитном поле, в обмотке ротора наводится ЭДС, ее частота прямо пропорциональна скорости вращения вала. Появление тока в обмотке ротора вызвано наличием вышеупомянутой ЭДС. Ток создает магнитный поток, который неподвижнен относительно статора. Взаимодействие результирующего магнитного поля АД и тока ротора создает тормозной момент. При этом асинхронный двигатель становится генератором; преобразовует кинетическую энергию вращающегося вала в электрическую, которая на обмотке ротора рассеивается в виде тепловой энергии. При переходе в режим динамического торможения частота и угловая скорость равны: f=0 w=0. Кривая динамического торможения должна проходить через начало координат и торможение происходит до полной остановки (рисунок 2).
Эффективность динамического торможения зависит от параметров:
— Величина постоянного тока, который протекает по статорной обмотке двигателя (чем больше ток, тем больше тормозной эффект);
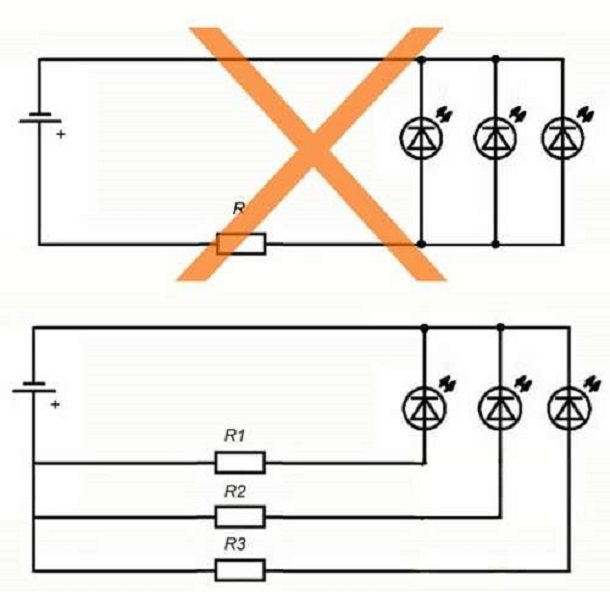
— Величина сопротивления, введенного в цепь ротора. Эффективность торможения повышается путем комбинирования динамического торможения и торможения с введением сопротивлений в обмотку ротора (рисунок 2):
Рисунок 2 – Механическая характеристика динамического торможения асинхронного двигателя
Чем больше сопротивление введено в цепь ротора, тем выше эффективность торможения, то есть на кривой а1 изображена самая быстрая остановка двигателя при наибольшем сопротивлении — R1>R2>R3.
— Схема соединения обмоток статора.
Величина магнитодвижущей силы (F) напрямую связана с понятием эффективность торможения, чем больше значение силы – тем эффективней происходит торможение,
F=I·W.
На рисунках, которые изображены ниже, стрелками показаны направления протекания постоянного тока по обмоткам, IW– ампер витки (так как количество витков в обмотках одинаково, то зависит значение только от величины тока). Векторные диаграммы иллюстрируют направления магнитодвижущих сил (F), сложив по правилам суммирования векторы, мы получим результирующий вектор, который обозначен жирной стрелкой.
Обмотка статора может быть соединена:
а) Схема соединения обмотки статора в звезду:
б) Схема соединения статорной обмотки в треугольник:
в) Соединение обмотки статора в звезду с закороченными двумя фазами:
г) Подключение звезда с разорванным нулем:
д) Подключение треугольник с закороченными фазами:
Схемы соединения а) и б) имеют наибольшее распространение, потому что не требуют переключения при торможении самих обмоток.
Необходимо подметить, что напряжение (U) источника постоянного тока должно быть малой величиной, потому что сопротивление обмотки статора мало. Ток выбирается из условия необходимого начального тормозного момента, обычно выбирают ~2Mном.
Преимущества режима динамического торможения:
— Относительная простота осуществления способа;
— Возможность торможения до полной остановки вала ротора;
— Высокая эффективность торможения, особенно при использовании комбинированного метода.
Основным недостатком является необходимость наличия источника постоянного тока.
Расчет величины тормозного сопротивления:
RT = 2·rф.ст + rт,
rт=RT — 2rф.ст,
где RT — полное сопротивление цепи источника постоянного тока,
rф.ст — сопротивление фазы статора.
Вышеприведенные формулы являются частным случаем (для понимания отношений величин сопротивления), когда постоянный ток протекает только по двум обмоткам статора, если же ток будет протекать по трем обмоткам, то коэффициент (количество фаз) перед сопротивлением фазы статора нужно соответственно изменить.
Советую вам прочесть статью про торможение противовключением, в которой подробно расписан данный вид остановки двигателя.
Недостаточно прав для комментирования
Способы электрического торможения электроприводов
Для того чтобы быстро остановить устройство или обеспечить постоянную скорость вращения используют электрические способы остановки. В зависимости от схемы включения тормозные режимы подразделяют на:
- противовключения;
- динамический;
- рекуперативный.
Противовключения
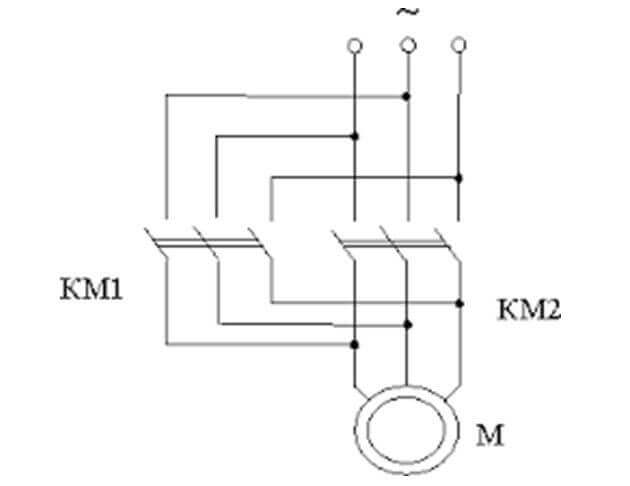
Режим противовключения применяется при необходимости быстрой остановки механизма. Представляет собой смену полярности на обмотке якоря двигателя постоянного тока или переключения двух фаз на обмотках асинхронного электродвигателя.
В этом случае ротор вращается в противоположном направлении магнитного поля статора. Вращение ротора замедляется. При скорости вращения близкой к нулю с реле контроля скорости поступает сигнал, отключая механизм от сети.
На нижеприведенном рисунке представлена схема противовключения асинхронного электромотора.
После переключения обмоток возникает повышенное действующее напряжение и увеличение тока. Для его ограничения, в обмотки ротора или статора устанавливают дополнительные резисторы. Они ограничивают токи в обмотках в режиме торможения.
Динамическая остановка электропривода
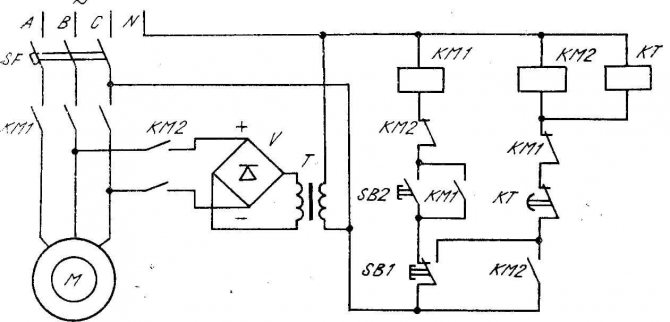
Этот способ применяют на асинхронных машинах, подключенных к сети переменного тока. Он заключается в отключении обмоток от сети переменного напряжения и подачи постоянного тока на обмотку статора.
На вышеприведенном рисунке представлена схема торможения трехфазного двигателя постоянным током.
Подача постоянного напряжения осуществляется с помощью понижающего трансформатора для динамического торможения. Пониженное переменное напряжение преобразуется в постоянное диодным мостом и подается на статорную обмотку. Для торможения электромотора может применяться дополнительный источник постоянного тока.
При этом ротор может быть выполнен в виде «беличьей клетки» или ее обмотку подключают к добавочным резисторам.
Постоянное напряжение создает неподвижный магнитный поток. При вращении ротора в нем наводится ЭДС, т.е. электромотор переходит в режим генератора. Возникающая электродвижущая сила рассевается на обмотке ротора и добавочных резисторах. Создается тормозной момент. В момент остановки механизма постоянное напряжение отключается по сигналу реле скорости.
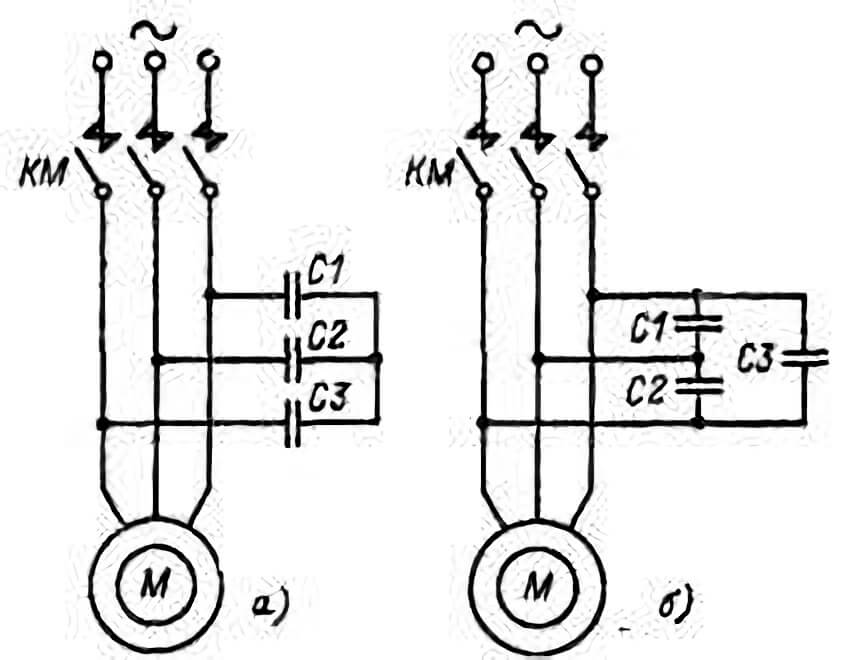
Механизмы, где применяется электродвигатель с самовозбуждением, динамическую остановку выполняют с помощью подключения конденсаторов. Они соединяются треугольником или звездой.
Схема приведена на нижеприведенном рисунке.
На выбеге остаточная энергия магнитного поля переходит в заряд конденсаторов, а затем она питает обмотку статора. Возникающий тормозной эффект останавливает механизм. Конденсаторная батарея может быть подключена постоянно или подсоединяться в момент отключения от сети. Такая схема получила название «конденсаторное торможение асинхронного двигателя».
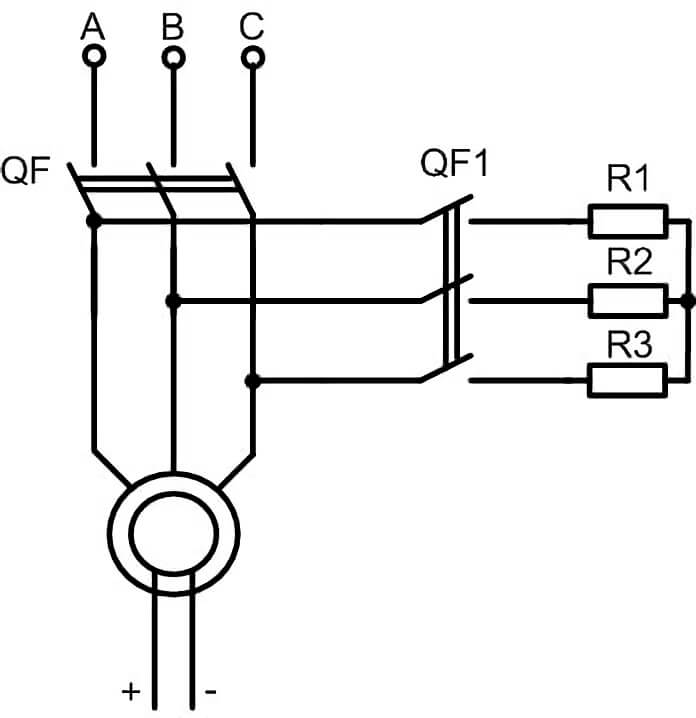
Если необходимо быстро остановить двигатель, то после отключения от сети, замыкают контакты накоротко без гасящих резисторов. При соединении обмоток закорачиванием в них возникают большие токи. Для уменьшения токов к обмоткам подключают токоограничивающие резисторы.
На нижеприведенном рисунке представлена схема с токоограничивающими резисторами.
Система рекуперации с накопительным конденсатором
Период торможения автомобиля длится достаточно короткое время. Поэтому из-за технологических особенностей устройства современных аккумуляторных батарей (а вернее химических процессов, происходящих при их подзарядке) сохранить большое количество энергии в них довольно трудно. Компания Mazda разработала систему рекуперации с использованием накопительного конденсатора. В процессе торможения специальный генератор с напряжением 12÷25 В за короткий отрезок времени заряжает емкость. Далее накопленная энергия через конвертор (DC/DC) преобразуется в привычные 12 В и поступает либо на различные потребители (кондиционер, CD-плейер и так далее), либо подзаряжает штатную аккумуляторную батарею. По утверждению производителя экономия топлива составляет не менее 10%.
Схемы подключения трехфазных электродвигателей
ВАЖНО! Перед подключением электродвигателя необходимо убедится в правильности схемы соединения обмоток электродвигателя в соответствии с его паспортными данными
Условные обозначения на схемах
Магнитный пускатель (далее — пускатель) — коммутационный аппарат предназначенный для пуска и остановки двигателя. Управление пускателем осуществляется через электрическую катушку, которая выступает в качестве электромагнита, при подаче на катушку напряжения она воздействует электромагнитным полем на подвижные контакты пускателя которые замыкаются и включают электрическую цепь, и наоборот, при снятии напряжения с катушки пускателя — электромагнитное поле пропадает и контакты пускателя под действием пружины возвращаются в исходное положение размыкая цепь.
У магнитного пускателя есть силовые контакты предназначенные для коммутации цепей под нагрузкой и блок-контакты которые используются в цепях управления.
Контакты делятся на нормально-разомкнутые — контакты которые в своем нормальном положении, т.е. до подачи напряжения на катушку магнитного пускателя или до механического воздействия на них, находятся в разомкнутом состоянии и нормально-замкнутые — которые в своем нормальном положении находятся в замкнутом состоянии.
В новых магнитных пускателях имеется три силовых контакта и один нормально-разомкнутый блок-контакт. При необходимости наличия большего количества блок-контактов (например при сборке реверсивной схемы пуска электродвигателя), на магнитный пускатель сверху дополнительно устанавливается приставка с дополнительными блок-контактами (блок контактов) которая, как правило, имеет четыре дополнительных блок-контакта (к примеру два нармально-замкнутых и два нормально-разомкнутых).
Кнопки для управления электродвигателем входят в состав кнопочных постов, кнопочные посты могут быть однокнопочные, двухкнопочные, трехкнопочные и т.д.
Каждая кнопка кнопочного поста имеет по два контакта — один из них нормально-разомкнутый, а второй нормально-замкнутый, т.е. каждая из кнопок может использоваться как в качестве кнопки «Пуск» так и в качестве кнопки «Стоп».
Схема прямого включения электродвигателя
Данная схема является самой простой схемой подключения электродвигателя, в ней отсутствует цепь управления, а включение и отключение электродвигателя осуществляется автоматическим выключателем.
Главными достоинствами данной схемы является дешевизна и простота сборки, к недостаткам же данной схемы можно отнести то, что автоматические выключатели не предназначены для частого коммутирования цепей это, в сочетании с пусковыми токами, приводит к значительному сокращению срока службы автомата, кроме того в данной схеме отсутствует возможность устройства дополнительной защиты электродвигателя.
Советуем изучить — дробилки.про — производство и продажа дробилок, грохотов, питателей, конвейеров, запчастей
Схема подключения электродвигателя через магнитный пускатель
Эту схему так же часто называют схемой простого пуска электродвигателя, в ней, в отличии от предыдущей, кроме силовой цепи появляется так же цепь управления.
При нажатии кнопки SB-2 (кнопка «ПУСК») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1, при отпускании кнопки SB-2 ее контакт снова размыкается, однако катушка магнитного пускателя при этом не обесточивается, т.к. ее питание теперь будет осуществляться через блок-контак KM-1.1 (т.е. блок-контак KM-1.1 шунтирует кнопку SB-2). Нажатие на кнопку SB-1 (кнопка «СТОП») приводит к разрыву цепи управления, обесточиванию катушки магнитного пускателя, что приводит к размыканию контактов магнитного пускателя и как следствие, к остановке электродвигателя.
Использование в автомобилестроении[править | править код]
Использование на легковых и грузовых автомобилях
С развитием рынка гибридных и электроавтомобилей система рекуперации зачастую используется для увеличения дальности пробега автомобиля на электрическом заряде. Наиболее распространенными автомобилями этих классов является Toyota Prius, Chevrolet Volt, Honda Insight, Tesla Model S,3,X,Y
Есть отдельные случаи применения системы рекуперации в автомобиле с привычным бензиновым двигателем для сокращения расхода топлива. Такая система разрабатывалась на а/м Ferrari для обеспечения функционирования внутренних мультимедийных и климатических систем автомобиля от отдельной батареи, заряжаемой рекуперируемой энергией.
Система рекуперации энергии при торможении для электромобилей и электровелосипедов подвергается критике. Тормозной путь автомобиля очень мал по сравнению с проезжаемым путём и составляет от нескольких метров до несколько десятков метров (водитель обычно относительно резко тормозит у самого светофора или места назначения, или вообще подъезжает к месту назначения накатом). За такое короткое время аккумуляторы не успевают сколь-нибудь значительно зарядиться рекуперативным током, даже в городском цикле при частых торможениях. Экономия энергии за счёт рекуперации в лучшем случае составляет доли процента, и поэтому система рекуперативного торможения электромобиля неэффективна и не оправдывает усложнения конструкции. К тому же рекуперативное торможение не освобождает от необходимости обычной колодочной тормозной системы, так как на малых оборотах двигателя в режиме генератора его противо-ЭДС мала и недостаточна для полной остановки автомобиля. Также рекуперативное торможение не решает проблему стояночного тормоза (за исключением искусственного динамического удержания ротора на месте, на что расходуется значительная энергия). В современных электромобилях имеется возможность настройки педали «газа» — при её отпускании электромобиль либо продолжает двигаться по инерции накатом, либо переходит в режим рекуперативного торможения.
Однако рекуперация эффективна для электротранспорта с его частыми участками разгона-торможения, где тормозной путь большой и соизмерим с расстоянием между станциями (метро, пригородные электропоезда).
Использование в автоспорте
В сезоне 2009 года в Формуле-1 на некоторых болидах использовалась система рекуперации кинетической энергии (KERS). Рассчитывалось, что это подстегнёт разработки в области гибридных автомобилей и дальнейшие совершенствования данной системы.
Впрочем, у Формулы-1 с её мощным двигателем разгон на малых скоростях ограничивается сцеплением шин, а не крутящим моментом. На высоких же скоростях использование KERS не столь эффективно. Так что по результатам сезона-2009 оснащённые данной системой болиды не демонстрировали превосходства над соперниками на большинстве трасс. Однако это может объясняться не столько неэффективностью системы, сколько трудностью её применения в условиях строгих ограничений на вес машины, действовавших в 2009 году в Формуле-1. После соглашения команд не использовать KERS в 2010 году для сокращения издержек, в сезоне 2011 года использование системы рекуперации было продолжено.
По состоянию на 2012 год на систему KERS налагаются следующие ограничения: передаваемая мощность не более 60 кВт (около 80 л.с.), ёмкость хранилища не более 400 кДж. Это означает, что 80 л.с. можно использовать не более 6.67 с на круг за один или несколько раз. Таким образом, время круга можно уменьшить на 0.1-0.4 с.
Техническим регламентом Формулы-1, утверждённым FIA на 2014 год, предусмотрен переход на более эффективные турбомоторы со встроенной системой рекуперации (ERS). Применение двойной системы рекуперации (кинетической и тепловой) в сезонах 2014—2015 годов стало гораздо более актуально из-за введения жёстких регламентных ограничений на расход топлива — не более 100 кг на всю гонку (в прошлые годы 150 кг) и мгновенный расход не более 100 кг в час. Неоднократно можно было наблюдать, как во время гонки при выходе из строя системы рекуперации машина начинала быстро терять позиции.
Рекуперативное торможение используется также в гонках на выносливость. Такой системой оснащены спортпрототипы класса LMP1 заводских команд Audi R18 и Toyota TS050 Hybrid, Porsche 919 Hybrid.
Способы электрического торможения электроприводов
Для того чтобы быстро остановить устройство или обеспечить постоянную скорость вращения используют электрические способы остановки. В зависимости от схемы включения тормозные режимы подразделяют на:
- противовключения;
- динамический;
- рекуперативный.
Противовключения
Режим противовключения применяется при необходимости быстрой остановки механизма. Представляет собой смену полярности на обмотке якоря двигателя постоянного тока или переключения двух фаз на обмотках асинхронного электродвигателя.
В этом случае ротор вращается в противоположном направлении магнитного поля статора. Вращение ротора замедляется. При скорости вращения близкой к нулю с реле контроля скорости поступает сигнал, отключая механизм от сети.
На нижеприведенном рисунке представлена схема противовключения асинхронного электромотора.
После переключения обмоток возникает повышенное действующее напряжение и увеличение тока. Для его ограничения, в обмотки ротора или статора устанавливают дополнительные резисторы. Они ограничивают токи в обмотках в режиме торможения.
Динамическая остановка электропривода
Этот способ применяют на асинхронных машинах, подключенных к сети переменного тока. Он заключается в отключении обмоток от сети переменного напряжения и подачи постоянного тока на обмотку статора.
На вышеприведенном рисунке представлена схема торможения трехфазного двигателя постоянным током.
Подача постоянного напряжения осуществляется с помощью понижающего трансформатора для динамического торможения. Пониженное переменное напряжение преобразуется в постоянное диодным мостом и подается на статорную обмотку. Для торможения электромотора может применяться дополнительный источник постоянного тока.
При этом ротор может быть выполнен в виде «беличьей клетки» или ее обмотку подключают к добавочным резисторам.
Постоянное напряжение создает неподвижный магнитный поток. При вращении ротора в нем наводится ЭДС, т.е. электромотор переходит в режим генератора. Возникающая электродвижущая сила рассевается на обмотке ротора и добавочных резисторах. Создается тормозной момент. В момент остановки механизма постоянное напряжение отключается по сигналу реле скорости.
Механизмы, где применяется электродвигатель с самовозбуждением, динамическую остановку выполняют с помощью подключения конденсаторов. Они соединяются треугольником или звездой.
Схема приведена на нижеприведенном рисунке.
На выбеге остаточная энергия магнитного поля переходит в заряд конденсаторов, а затем она питает обмотку статора. Возникающий тормозной эффект останавливает механизм. Конденсаторная батарея может быть подключена постоянно или подсоединяться в момент отключения от сети. Такая схема получила название “конденсаторное торможение асинхронного двигателя”.
Если необходимо быстро остановить двигатель, то после отключения от сети, замыкают контакты накоротко без гасящих резисторов. При соединении обмоток закорачиванием в них возникают большие токи. Для уменьшения токов к обмоткам подключают токоограничивающие резисторы.
На нижеприведенном рисунке представлена схема с токоограничивающими резисторами.
Электрические схемы
| Режим работы – прямой пуск электродвигателя, реверсивный (1 фидер).
Шкаф управления асинхронным двигателем предназначен для местного, дистанционного или автоматического управления одним электродвигателем (пуск электродвигателя, реверс и отключение вращающегося электродвигателя), работающим в продолжительном, кратковременном или повторно-кратковременном режимах.Реверс – это изменение направления вращения ротора. Для реверса необходимо изменить направление вращения магнитного поля статора, что в трехфазных асинхронных двигателях достигается переменой мест двух любых проводов на клеммах трехфазной сети.Ящик имеет местную индикацию состояния работы и возможность для подключения дистанционного управления и дистанционной индикации состояния работы фидера. №НаименованиеКодКол-во |
1SAM250000R1011 | 1 | |
| 2 | Боковые доп. контакты 1НО+1НЗ HK1-11 для автоматов типа MS116 | 1SAM201902R1001 | 1 |
| 3 | Контактор AF16-30-10-13 с универсальной катушкой управления 100-250BAC/DC | 1SBL177001R1310 | 2 |
| 4 | Клемма M4/6 винт 4мм.кв. серая | 1SNA115116R0700 | 6 |
| 5 | Клемма M4/6.N винт 4мм.кв. , синяя | 1SNA125116R0100 | 1 |
| 6 | Клемма M4/6.P винт 4мм.кв. Земля | 1SNA165113R1600 | 2 |
| 7 | Блокировка электромеханическая VEM4 для контакторов AF09…AF38 | 1SBN030111R1000 | 1 |
| 8 | Контактный блок CA5-10 1НО фронтальный для A9.. A110 | 1SBN010010R1010 | 4 |
| 9 | Контактный блок CA5-01 1Н3 фронтальный для A9.. A110 | 1SBN010010R1001 | 4 |
| 10 | Лампа CL-523G зеленый со встроенным светодиодом 230В AC | 1SFA619402R5232 | 2 |
| 11 | Кнопка CP1-30R-01 красная без фиксации 1HЗ | 1SFA619100R3041 | 1 |
| 12 | Кнопка CP1-30G-10 зеленая без фиксации 1HO | 1SFA619100R3012 | 2 |
| 13 | Переключатель ONU2PBR 3-х поз.(1-0-2) (двухуровневый) | 1SCA113972R1001 | 1 |
| 14 | Клемма MA2,5/5 винт 2,5мм.кв. оранжевая | 1SNA105075R2000 | 15 |
| 15 | Клемма MA2,5/5.N винт 2,5мм.кв. синяя | 1SNA125486R0500 | 2 |
| 16 | Изолятор FEM6 Торц. для MA2,5-M10 серый | 1SNA118368R1600 | 1 |
| 17 | Фиксатор BAM3 Торц. для рейки DIN3, универсальный | 1SNK900001R0000 | 2 |
| 18 | SR2 Корпус шкафа с монт.платой 400х300х150мм ВхШхГ | SRN4315K | 1 |
| 19 | Автомат.выкл-ль 1-полюсной S201 C6 | 2CDS251001R0064 | 1 |
| 20 | Провод, маркировка, расходные материалы | 1 |
Описание и свойства прямого пуска асинхронного электродвигателя
При пуске ротор двигателя, преодолевая момент нагрузки и момент инерции, разгоняется от частоты вращения п = 0 до п . Скольжение при этом меняется от sп = 1 до s. При пуске должны выполняться два основных требования: вращающий момент должен бить больше момента сопротивления (Мвр>Мс) и пусковой ток Iп должен быть по возможности небольшим.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска: прямой пуск, пуск с использованием дополнительных сопротивлений, пуск при пониженном напряжении и др.
Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. Схема прямого пуска приведена на однолинейной электрической схеме. При включении контактора в первый момент скольжение s = l, а приведенный ток в роторе и равный ему ток статора
максимальны. По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока kI = IП / I1НОМ = ( 5,…,7), причем большее значение относится к двигателям большей мощности.
Значение пускового момента находится при s = 1:
Для серийных двигателей кратность пускового момента МП/ МНОМ = (1.0,…,1.8).
Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться.
С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места.
В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт).
График изменения тока и момента при пуске асинхронного двигателя с короткозамкнутым ротором.
Классическое динамическое торможение
Эффективность такого режима работы зависит от расчета и значения следующих параметров:
- Величина тока, который подается через параллельную цепь на обмотки статора. Чем выше этот показатель, тем больше момент торможения,
- Величина сопротивления, которое вводится в цепь ротора. Чем выше по расчету сопротивление, тем быстрее тормозится двигатель,
- Величина магнитной движущей силы (МДС). Иногда ее называют ампер витками, поскольку расчет ведется по формуле F = I×W, где I – величина тока, а W – количество витков.
Обмотка статора при этом может подключаться как минимум пятью разными способами:
- Треугольником,
- Треугольником с закороченными фазами,
- Звездой,
- Звездой с закороченным нулем,
- Звездой с закороченными двумя фазами.
В каждом случае на основании векторной диаграммы ведется расчет МДС, тормозного сопротивления и напряжения цепи.
Способы и схемы торможения электродвигателей
Торможение электродвигателя применяют, если необходимо сократить время свободного выбега и фиксацию механизма в конкретном положении. Существует несколько видов принудительной остановки устройства. Это механическое, электрическое и комбинированное. Механическое устройство представляет собой тормозной шкив, закрепленный на валу, с колодками. После отключения устройства колодки прижимаются к шкиву. За счет трения кинетическая энергия преобразуется в тепловую, т.е. происходит процесс торможения. Остальные способы и схемы торможения электрического двигателя будут рассмотрены далее в статье.
Рекуперация: и дать, и взять

16 февраля 2011 годаЕще до появления легковых гибридов рекуперативное торможение широко применяли в многотонной колесной и рельсовой технике, работающей на электрической тяге.
Еще до появления легковых гибридов рекуперативное торможение широко применяли в многотонной колесной и рельсовой технике, работающей на электрической тяге.
Термин «рекуперация» произошел от латинского recuperatio (обратное получение) и означает возвращение некоего количества вещества или энергии для последующего использования в том же технологическом процессе.
Например, существует рекуперация тепла в системах вентиляции, когда удаляемый из помещения воздух подогревает поток, нагнетаемый внутрь. Или рекуперация драгоценных камней или металлов, которые извлекают из отработавших ресурс инструментов, восстанавливают и вновь пускают в производство. В транспортных же машинах, в том числе в автомобилях, часто встречается рекуперация электрической энергии.
Как оно работает
Самый простой пример конструкции, позволяющей возвращать энергию, — умный генератор. При интенсивном разгоне он отключается, чтобы разгрузить двигатель, — следовательно, уменьшается расход топлива и количество вредных выбросов. Потребители электричества в это время вытягивают энергию из аккумулятора.
Водитель убирает ногу с педали газа — генератор вновь подключается и пополняет заряд батареи, а автомобиль экономит до 3% горючего.
Направление потоков энергии при рекуперации. При разгоне электричество поступает из батареи в электродвигатель, где преобразуется в механическую энергию для вращения колес.
https://youtube.com/watch?v=yfo6U3bUISM
Направление потоков энергии при рекуперации. При разгоне электричество поступает из батареи в электродвигатель, где преобразуется в механическую энергию для вращения колес.
Еще больше пользы приносит рекуперация в гибридных и электрических моделях. Тут электромотор выполняет две функции — движущей силы и генератора.
Разгоняя автомобиль, он потребляет электричество, а при замедлении преобразует механическую энергию в электрическую. Стоит отпустить педаль акселератора, как электроны начинают двигаться в обратную сторону — и батарея заряжается.
При торможении колеса раскручивают электромотор, тот переходит в режим генератора и отдает электроэнергию обратно в батарею.При торможении колеса раскручивают электромотор, тот переходит в режим генератора и отдает электроэнергию обратно в батарею.
У таких машин тормозная система, как и силовая установка, — гибридная.
Важно
Бессменная гидравлика, приводящая в действие колесные механизмы, работает обычно при интенсивном замедлении, а при плавном (до 0,2–0,3g) используется так называемое рекуперативное торможение.
Электродвигатель переходит в режим генератора, обмотки статора отдают ток в аккумуляторную батарею, что создает тормозной момент, заставляющий автомобиль останавливаться. Чем сильнее водитель давит на тормоз, тем выше противодействующий момент — и тем интенсивнее автомобиль замедляется, а электромотор заряжает батареи.
Таким образом, рекуперация позволяет не только экономить топливо (примерно 5–10%), но и в полтора-два раза реже менять тормозные колодки.
Повышенная энергоотдача в батарею происходит и в случае, если селектор режимов движения переведен в положение B (Brake). При этом автомобиль лучше тормозит двигателем, поэтому на горной дороге быстрее пополнится запас электричества в аккумуляторах, а тормозные диски и колодки не перегреются.
Использование
Принцип рекуперации пытаются использовать в автомобилях Формулы 1: редкий случай, когда технологию опробовали на серийных машинах, а потом предложили королеве автоспорта. Правда, конструкции так называемого KERS (Kinetic Energy Recovery System — система возврата кинетической энергии) здесь более изощренные. Большинство команд используют электрическую рекуперацию. У «Вильямса» в коробку встроен сверхкомпактный маховик, который раскручивается при торможении, накапливая механическую энергию, чтобы потом отдать ее обратно на колеса:
Обкатав KERS на формулах, Ferrari примерила систему рекуперации на дорожный автомобиль.
На базе купе 599 GTB Fiorano появился первый в истории Ferrari гибрид 599 GTB HY-KERS. Шестилитровому бензиновому двигателю на разгоне помогает 74-киловаттный электромотор, вырабатывающий энергию при торможении и позволяющий проехать на электротяге до 5 км. Рекуперация: и дать, и взятьРекуперация: и дать, и взятьОшибка в тексте? Выделите её мышкой! И нажмите: Ctrl + Enter
Тормозные режимы двигателей постоянного тока
Динамическое торможениед
U=E+IR →
Ток меняет знак и становится тормозным (и момент тоже). Под действием тормозного момента Мторм ДПТ интенсивно тормозится. (см. графики на рисунке 3.17)
Торможение противовключением (см. рисунок 3.18).
Осуществляется двумя методами:
§ 1 метод: изменим полярность напряжения на якоре (или на обмотке возбуждения).
U=E+IR →
торм.
2 метод: тормозной спуск грузов в режиме противовключения (см. рисунок 3.19).
 доб
доб
Генераторный режим с рекуперацией (см. рисунок 3.20)
ЭД включают на опускание груза, и под действием суммарного момента электродвигатель разгоняется до скорости ω>ω. Момент меняет свой знак и становится тормозящим.
Расчет резисторов
| Задача 3.2 ДПТ НВ | Из предыдущего расчета (см. пример расчета естественных характеристик): ωн=131 рад/с kФн=3,05 В·с Мн=2290 Н·м ω=144 рад/с 1. Номинальное ЭДС, В Ен= kФн·ωн Ен =3,05·131=400 2. Номинальное КПД 3. Сопротивление якоря, Ом 4. Сопротивление добавочное, Ом |
| Дано: Р=300 кВт Uн=440 В nн=1250 об/мин Iн=750 А Динамическое торможение ω=ωн Iт=1,5Iн | |
| Rдоб. -? | |
| Задача 3.3 | |
| Дано: Этот же ДПТ; Режим противовключения ω = 0,7ωн Iт=1,7Iн | Из предыдущих расчетов: Rя=0,03 Ом Eн= 400 В 1. Добавочное сопротивление, Ом: |
| Rдоб. -? | |
| Задача 3.4 Дано: Этот же ДПТ; Пуск двигателя U=Uн Iпуск=2,5Iн | Из предыдущих расчетов: Rя=0,03 Ом 1. Добавочное сопротивление, Ом: |
| Rдоб. -? |
| | | следующая лекция ==> | |
| Пусковая диаграмма двигателей постоянного тока независимого возбуждения | | | Регулирование скорости двигателей постоянного тока |
Дата добавления: 2019-10-16 ; просмотров: 395 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ