Номинальная скорость вращения
Прежде, чем дать определение этому понятию, необходимо определиться, что такое номинальный режим работы какого-либо устройства. Это такой порядок работы устройства, при котором достигаются наибольшая эффективность и надёжность процесса на продолжении длительного времени. Исходя из этого, номинальная скорость вращения – количество оборотов в минуту при работе в номинальном режиме. Время, необходимое для одного оборота, составляет 1/v секунд. Оно называется периодом вращения T. Значит, связь между периодом обращения и частотой имеет вид:
К сведению. Частота вращения вала асинхронного двигателя – 3000 об./мин., это номинальная скорость вращения выходного хвостовика вала при номинальном режиме работы электродвигателя.
Как найти или узнать частоты вращений различных механизмов? Для этого применяется прибор, который называется тахометр.
Регулятор оборотов мощности
Принципы работы
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
https://youtube.com/watch?v=N8fTC5IOVFY
https://youtube.com/watch?v=qqljWixeLx0
Вращение вала
Двигатели делят на:
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
https://youtube.com/watch?v=XnuGxL9OmXE
https://youtube.com/watch?v=3YecjgtG9pQ
Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор. В основном регулировка двигателя начинается от 1000 оборотов.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм. Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.
https://youtube.com/watch?v=_6qFeiyYtvU
https://youtube.com/watch?v=nj6sHzeuGxQ
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
Разные типы двигателя
В отличие от трёхфазного, однофазный асинхронный двигатель часто применяется в бытовой технике – пылесосах, стиральных машинах, вентиляторах, кухонных комбайнах, блендерах и т.д. Они же применяются в магнитофонах и проигрывателях виниловых дисков. Даже в составе персонального компьютера можно найти не один асинхронный двигатель. Но к устройству этой версии двигателя мы вернёмся чуть позже.
Первым появился на свет именно трёхфазный электродвигатель, принцип работы которого строился на взаимодействии электромагнитных полей. Основные части асинхронного двигателя – это статор и ротор. Соответственно, статором была названа часть, которая остаётся неподвижной. Именно она находится непосредственно под внешней оболочкой устройства и имеет форму цилиндра. В этой части по кругу расположены три обмотки – под углом 120° друг к другу.
В современных двигателях можно насчитать множество обмоток, однако, они соединены друг с другом так, чтобы каждая последующая отличалась от предыдущей по фазе, и фазовый сдвиг между соседними обмотками составлял 120°. Обмотки наматываются медным проводом, и к каждой из групп подключается напряжение со своей фазы. Таким образом, получается, что магнитное поле движется по этим обмоткам, как бы замыкаясь в кольцо.
Статор тоже имеет свои обмотки. Так как на статор электричество не подаётся, он имеет право на замкнутый проводник, который иногда вместо обмоток формируют в виде так называемой беличьей клетки. Если сравнивать точнее, то эта деталь напоминает не саму клетку для проворного грызуна, а беличье колесо, предназначенное для того, чтобы животное выплёскивало свою неуёмную энергию. В роторе устройства «беличья клетка» формируется путём заливки расплавленного алюминия в пазы сердечника, выполненного из набранных стальных листов. Такое устройство называется короткозамкнутым ротором.
Если статор выполнен с реальными обмотками, то он обычно делается многополюсным. Такой ротор называют фазным. Обмотки этого ротора замыкают звездой или треугольником.
Ротор имеет собственный вал, который опирается на задний и передний подшипники. Они, в свою очередь, закреплены на корпусе двигателя так, что ротор внутри статора может свободно вращаться. Принцип действия асинхронных двигателей основан на том, что в обмотках или «беличьем колесе» статором наводится магнитное поле. Под его действием в проводниках ротора появляется ток, а с ним – собственное магнитное поле.
Переменное магнитное поле статора увлекает за собой ротор, и тот начинает вращаться. Но магнитное поле ротора всегда запаздывает относительно поля статора, и вращение обоих полей не может происходить синхронно. Это заставляет ротор преодолевать множество действующих на него сил:
- силу тяготения;
- трение качения (если используется шариковый или роликовый подшипник);
- трение скольжения (если в качестве подшипника применяется бронзовая втулка);
- силу противодействия приводимого в движение оборудования.
Последняя сила зависит от многих моментов, поэтому её невозможно свести к какому-либо простейшему физическому параметру. Если надо сдвинуть с места трамвай, то двигателю приходится на себя брать нагрузку от редуктора, который надо раскрутить, от самого вагона, который надо сдвинуть, к тому же не надо забывать ещё и о силе трения качения, которое испытывают колёса транспортного средства.
В случае когда идет описание работы профессиональной мясорубки, которую приводит в действие асинхронный двигатель, то здесь преодолевается сопротивление и самого редуктора, и того куска мяса или даже кости, которую надо перемолоть.
Поскольку между статором и ротором есть зазор, то ротор под нагрузкой просто отстаёт от статора по угловой скорости. Следовательно, частота вращения ротора зависит от нагрузки на вал двигателя. Нарушается принцип синхронности, оттуда и название самого устройства: «асинхронный двигатель».
Генерирование переменного тока
Кроме стандартных генераторов, для производства переменного тока применяются инверторы и фазорасщепители.
Инвертор
Это устройство, с помощью которого из постоянного тока получают его переменный вид. В процессе этого величина выходного напряжения тоже меняется. Схема устройства представляет собой электронный генератор синусоидального импульсного напряжения периодического характера. Есть варианты инверторов, работающих с дискретным сигналом. Инверторы применяют для автономного питания оборудования от аккумуляторов постоянного напряжения.

Фазорасщепитель
Ещё один способ получить несколько фаз из какого-либо сигнала – это выполнить его расщепление на несколько фаз. Это делается с помощью фазорасщепителя. Принудительная обработка сигналов цифрового или аналогового формата используется, как в радиоэлектронике, так и в силовой электротехнике.
Для электроснабжения трёхфазных асинхронных двигателей применяют выполненный на их же базе фазорасщепитель. Для этого обмотки трёхфазного двигателя соединяют не «звездой», а иначе. Две катушки присоединяют между собой последовательно, третью – подключают к средней точке второй обмотки. Двигатель запускают, как однофазный, после разгона в его третьей обмотке наводится ЭДС.
Интересно. В случае расщепления фаз подобным методом сдвиг фаз между 2 и 3 обмоткой составляет не 1200, как должно быть в идеале, а 900.
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
Какие размеры необходимо замерить:
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Переход к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 90 | 100 | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355M2, АИР355M4 |
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
Для начала нужно подключить двигатель к сети и замерить показатели напряжения. Замеряем потребляемый ток на каждой из обмоток фаз с помощью амперметра или мультиметра. Далее, находим сумму токов трех фаз и умножаем на ранее замеренные показатели напряжения, наглядно в формуле расчета мощности электродвигателя по току.
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Принцип работы асинхронного электродвигателя с фазным ротором
Статор этого электродвигателя ничем не отличается от обычного. А вот в его ротор добавлены обмотки трех фаз, соединенные в звезду, концы которых выведены на контактные кольца. По кольцам скользят щетки, с помощью которых обмотки подключаются к электрической цепи.
Фазный ротор
Асинхронный двигатель с короткозамкнутым ротором работает так:
- ток в обмотках статора создает вращающийся магнитный поток внутри него;
- изменяющийся во времени магнитный поток, пересекая витки обмотки ротора, наводит в них ЭДС;
- поскольку обмотка ротора замкнута, за счет наведенной ЭДС в ней возникает ток;
- проводники обмотки ротора с током взаимодействуют с вращающимся полем статора, создается вращающий момент.
Особенность асинхронного двигателя с фазным ротором: ток в роторе можно изменять, подключая последовательно с его обмотками резисторы. Чем больше сопротивление резистора, тем меньше ток в роторе. С уменьшением тока уменьшается и сила взаимодействия с вращающимся полем статора. Скорость вращения падает.
Наличие резисторов в цепи ротора увеличивает объем пускорегулирующей аппаратуры двигателя. Мощность, которая рассеивается на них, возрастает с мощностью электродвигателя. Но и для небольших моторов она существенна, что приводит к громоздким конструкциям магазинов сопротивлений и необходимости обеспечивать им постоянное охлаждение. Резисторы изготавливаются из материалов, имеющих высокое удельное сопротивление. Проводники их наматываются на каркасы или монтируются на изоляторы из фарфора. Конструкция помещается в кожух с жалюзийными отверстиями для охлаждения или закрываются сеткой.
Магазин резисторов для кранового электродвигателя с фазным ротором
Не всегда возможно разместить резисторы в помещениях. На кранах они находятся непосредственно на мосту, что приводит к массовому скоплению внутри них пыли и необходимости часто проводить техническое обслуживание.
Советуем изучить — Вольт-амперные характеристики электрических ламп
Плавная регулировка скорости электродвигателя с фазным ротором не производится. Изменение сопротивления в цепи ротора производится фиксированными ступенями. Для этого резисторы разделяются на секции, соединенные последовательно, в цепях которых устанавливаются контакторы управления. При необходимости увеличить скорость вращения контакторы шунтируют часть резисторов, уменьшая их суммарное сопротивление. Для достижения максимальной скорости вращения шунтируются все резисторы, для минимальной – не шунтируется ничего.
Асинхронный электродвигатель с фазным ротором
А теперь рассмотрим несколько примеров построения схем управления асинхронным двигателем с фазным ротором.
Напряжение и схема подключения
Как отмечалось выше, схему соединения обмоток выбирают исходя из доступного линейного напряжения в трёхфазной сети. Наиболее распространенное напряжение в РФ это 380/220. Допустим, что у нас есть двигатель, шильдик которого выглядит, как показано на фотографии:
Здесь мы видим обозначение «треугольник/звезда» и напряжения «220/380В» — это значит, что если линейное напряжение в сети 380 – использовать «звезду», как зачастую и делают. Но если линейное напряжение в трёхфазной сети равно 220В, то нужно подключать этот двигатель по схеме «треугольник» (такое встречается и сегодня на старых предприятиях или отдельных участках электросети с напряжениями 220/127 вольт).
Также на эти цифры обращают внимание, когда двигатель подключают к однофазной сети, хоть через фазосдвигающий конденсатор, хоть через частотный преобразователь с однофазным входом и трёхфазным выходом, всегда выбирают ту схему обмоток, которая рассчитана на подключение к сети 220В. Порой попадаются и старые электродвигатели, в которых обмотки рассчитаны на номинальные напряжения 127/220 и они не предназначены для прямого включения в трёхфазную электросеть с линейным напряжением 380В
Их можно подключать только к однофазной сети через конденсатор или частотник, как было отмечено выше, но в этом случае обмотки уже нужно соединять «звездой»
Порой попадаются и старые электродвигатели, в которых обмотки рассчитаны на номинальные напряжения 127/220 и они не предназначены для прямого включения в трёхфазную электросеть с линейным напряжением 380В. Их можно подключать только к однофазной сети через конденсатор или частотник, как было отмечено выше, но в этом случае обмотки уже нужно соединять «звездой».
На предприятиях часто используются мощные электродвигатели, в которых наоборот, схема «треугольник» рассчитана на питание напряжением 380В, а звезда 660В (тогда на шильдике указывается 380/660). Такие двигатели, зачастую, используются, чтобы снизить пусковые токи при пуске, посредством переключения обмоток со схемы «звезда» на схему «треугольник», так как это дешевле, чем использовать частотник или устройства плавного пуска в этих же целях.
Обращайте внимание на то, что написано на шильдике. Неправильное подключение двигателя опасно его преждевременной смертью
Линейная скорость вращения, частота и частота угловая
В технике для некоторых вращающих конструкций, например, шестерен и валов, известны их рабочие частоты μ и линейные скорости v. Тем не менее каждую из этих характеристик можно использовать для определения угловой или циклической частоты.
Выше отмечалось, что частота μ измеряется в герцах. Она показывает количество оборотов вращающегося тела за одну секунду. Формула для нее принимает вид:
μ = 1/T
Если сравнить это выражение с соответствующим равенством для f, то формула, как найти частоту вращения f через μ описывающая, будет иметь вид:
f = 2*pi*μ
Эта формула интуитивно понятна, поскольку μ показывает количество оборотов за единицу времени, а f отражает ту же самую величину, только представленную в радианах.
Линейная скорость v связана со скоростью угловой ω следующим равенством:
v = ω*r
Поскольку модули величин f и ω равны, то из последнего выражения легко получить соответствующую формулу частоты вращения циклической. Запишем ее:
f = v/r
Где r — радиус вращения. Заметим, что скорость v линейно растет при увеличении радиуса r, при этом отношение этих величин является константой. Последнее умозаключение означает, что если измерять циклическую частоту вращения в любой точке сечения вращающегося массивного объекта, то она будет везде одинаковой.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
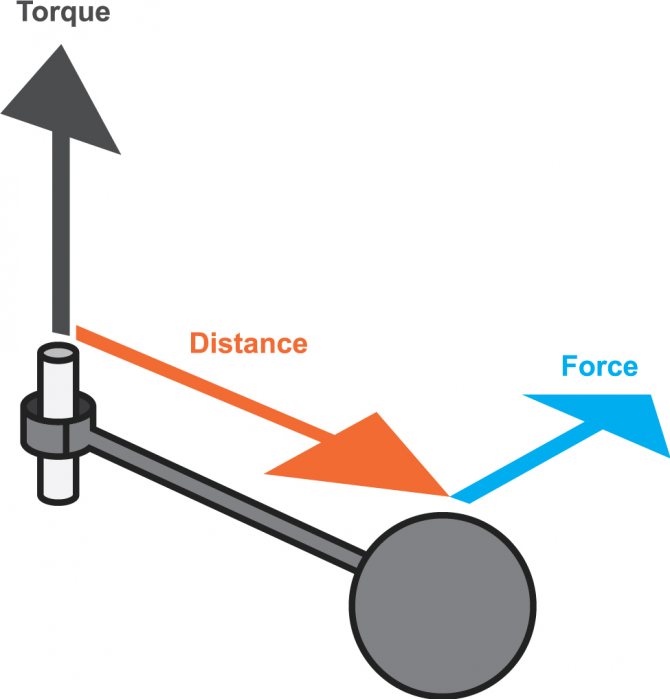
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M — крутящий момент, Нм;
F — прикладываемая сила, H;
Для расчета номинального вращающего момента привода используют формулу
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин -1 .
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Принцип работы
Рассмотрим асинхронный двигатель принцип работы и устройство. Для корректного подключения агрегата к сети, обмотки соединяются по схеме «звезда» или «треугольник». Действие механизма основано на использовании вращающегося магнитного поля статора. Частота вращения многофазной обмотки переменного поля (n1) определяется по формуле:
Здесь:
- f – частота сети в Герцах;
- p – Количество пар полюсов (как правило, 1-4 пары, поскольку чем их больше, тем ниже мощность и КПД, использование полюсов даёт возможность не применять редуктор, при низкой частоте вращения).
Магнитное поле, пронизывающее статор с обмоткой пронизывает и обмотку ротора. За счёт этого индуцируется электродвижущая сила. Электродвижущая сила самоиндукции в обмотке статора (Е1) направлена навстречу приложенному напряжению сети, ограничивая величину тока в статоре. Поскольку обмотка ротора замкнута, или идёт через сопротивление (короткозамкнутый ротор в первом случае, фазный ротор во втором случае), то под действием электродвижущей силы ротора (Е2) в ней образуется ток. Взаимодействие индуцируемого тока в обмотке ротора и магнитного поля статора создаёт электромагнитную силу (Fэл). Направление силы определяется по правилу левой руки.
Согласно правилу: левая рука устанавливается таким образом, что бы магнитно силовые линии входили в ладонь, а вытянутые четыре пальца направлялись вдоль движения тока в обмотке. Тогда отведённый большой палец покажет направление действия электромагнитной силы для конкретного проводника с током.
Совокупность электромагнитных сил двигателя будет равна общему электромагнитному моменту (М), который приводит в действие вал электродвигателя с частотой (n2). Скорость ротора не равна скорости вращения поля, поэтому эта скорость называется асинхронной скоростью. Вращающий момент в асинхронном двигателе развивается только при асинхронной скорости, когда скорость вращения ротора не равна скорости вращения магнитного поля
Важно, что бы при работе двигателя скорость ротора была меньше скорости поля (n2
Таким образом, частота вращения ротора (обороты) будет равна:
Принцип работы асинхронного электрического двигателя легко объясняется с помощью устройства, называющегося диск Арго – Ленца.
Постоянный магнит закрепляют на оси, которая устанавливается в устройстве, способном обеспечить её вращение. Перед полюсами магнита (N-S) помещают диск, выполненный из меди. Диск так же крепится на оси и свободно вращается вокруг неё.
Если вращать магнит за рукоятку, диск тоже будет вращаться в том же направлении. Эффект объясняется тем, что магнитные линии поля, создаваемые магнитом, замыкаются от северного полюса к южному полюсу, пронизывая диск. Эти линии образуют в диске вихревые токи, которые взаимодействуя с полем, приводят к возникновению силы, вращающей диск. Закон Ленца гласит, что направление всякого индукционного тока противодействует величине, вызвавшей его. Вихревые токи пытаются остановить магнит, но поскольку это не возможно, диск следует за магнитом.
Примечательно, что скорость вращения диска всегда меньше скорости вращения магнита. В асинхронных электродвигателях магнит заменяет вращающееся магнитное поле, созданное токами трёхфазной обмотки статора.
Определить мощность двигателя
Если вы постоянно используете электромашины, то часто натыкались на шильдики в которых, по сути, указанно все характеристики, в том числе и варианты мощности. Если посмотреть изображение шильдика, то среди разных параметров можно увидеть и значение мощности. Как видно, против надписи максимальная мощность стоит значение 1000 Вт. Но это не его электрическая мощность, как часто думает потребитель.
На изображённом ниже шильдике показана максимально допустимая мощность электротока. Часто пишут на шильдике рекомендуемую мощность и обозначают её киловаттами.
Итак, как же возможно рассчитать используемую мощность определенного двигателя из собственной электрической сети. Для этого нужно смотреть и на другие показатели на том же шильдике исследуемого прибора — это КПД и cosφ. Где КПД, бывает обозначают аббревиатурой КПД, или буквой η. Сначала нужно учитывать связь полезной мощности механики на валу и КПД. Имея данные значения можно легко рассчитать мощность потребляемую двигателем из электрической сети. Узнаем по соотношению: Ра=Р/η. Но это еще не результаты. Нужно помнить, электроприборы потребляют из сети как активную, так и реактивную энергию. При расчётах используемой движком полной мощи, необходимо получить соотношение из треугольника мощностей.
Эпилог
При всех своих достоинствах асинхронные машины имеют существенный недостаток, это рывок ротора при подаче напряжения. Такие режимы опасны как для самого двигателя, так и для приводных механизмов. Поскольку во время пуска АД, ток в обмотках двигателя приравнивается к короткому замыканию. А рывок вала разбивает подшипники, шлицы, передаточные устройства. Поэтому пуск АД стараются производить плавным стартом. А именно:
- Запуск через ЛАТР.
- Разгон и работа АД, через переключение обмоток двигателя звезда-треугольник.
- Использование устройств управления, таких как частотный преобразователь.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.