5.1 Ошибка компиляции
Возникает на этапе компиляции прошивки перед загрузкой. Ошибки компиляции вызваны проблемами в коде прошивки. Во время компиляции код проверяется и выявляются ошибки, Ардуино в этом случае может быть вообще не подключена к компьютеру.
“Какой-то текст”, not declared, no such file…
В некоторых случаях ошибка возникает при наличии кириллицы (русских букв) в пути к папке со скетчем. Решение: завести для скетчей отдельную папочку в корне диска с английским названием.
В чёрном окошке в самом низу Arduino IDE можно прочитать полный текст ошибки и понять, куда копать
При использовании каких-то особых библиотек, методов или функций, ошибкой может стать неправильно выбранная плата в “Инструменты/плата“. Пример: прошивки с библиотекой Mouse.h или Keyboard.h компилируются только для Leonardo и Micro.
Если прошивку пишете вы, то любые синтаксические ошибки в коде будут подсвечены, а снизу в чёрном окошке можно прочитать более детальное описание, в чём собственно косяк. Обычно указывается строка, в которой сделана ошибка, также эта строка подсвечивается красным.
Иногда причиной ошибки бывает слишком старая, или слишком новая версия Arduino IDE, читайте комментарии разработчика скетча. В большинстве случаев версия IDE ниже 1.8 будет выдавать ошибки, особенно в программах для ESP8266. Обновляйтесь!!
Также не рекомендуется ставить Arduino IDE из магазина Windows. Ставьте обычную как в инструкции выше.
Ошибка недостаточно свободного места возникает по вполне понятным причинам. Если в проекте используется плата Nano на процессоре 328p, а вы сэкономили три рубля и купили на 168 процессоре – скупой платит дважды. Оптимизация: статическая память – память, занимаемая кодом (циклы, функции). Динамическая память занята переменными.
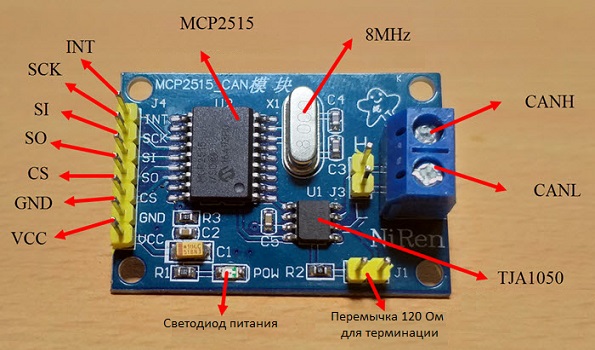
CAN модуль (контроллер шины CAN) MCP2515
Модуль MCP2515 включает в себя CAN контроллер MCP2515, который представляет собой высокоскоростной CAN приемопередатчик. Соединение модуля MCP2515 с микроконтроллером осуществляется с помощью интерфейса SPI, поэтому его легко подключить ко всем микроконтроллерам с данным интерфейсом.
Начинающим изучение CAN-шины целесообразно начинать именно с этого модуля ввиду его простоты и легкости подключения к большинству современных микроконтроллеров.
Основные технические характеристики модуля MCP2515:
- включает в себя высокоскоростной CAN приемопередатчик TJA1050;
- размеры модуля: 40×28mm;
- управление по интерфейсу SPI с возможностью подключения к CAN-шине нескольких устройств;
- кварцевый генератор на 8 МГц;
- сопротивление на концах 120 Ом;
- включает независимый ключ, светодиодный индикатор, индикатор мощности;
- поддерживает скорости передачи данных до 1 Мбит/с;
- низкий потребляемый ток в режиме ожидания;
- возможность подключения до 112 устройств (узлов).
Назначение контактов (распиновка) CAN модуля MCP2515 представлено в следующей таблице.
| Наименование контакта | Назначение контакта |
| VCC | контакт питания 5 В |
| GND | общий провод (земля) |
| CS | SPI SLAVE select pin (Active low) (выбор ведомого) |
| SO | SPI master input slave output lead |
| SI | SPI master output slave input lead |
| SCLK | контакт синхронизации SPI |
| INT | контакт прерывания MCP2515 |
В данном проекте мы будем передавать данные, считываемые с датчика температуры и влажности DHT11 платой Arduino Nano, плате Arduino Uno с помощью CAN модуля MCP2515.
Что такое Arduino
К сожалению некоторые начинающие радиолюбители считают Arduino микроконтроллером, но это не совсем так. Давайте попробуем разобраться что же это.
Arduino представляет собой платформу разработки с открытым исходным кодом, которая состоит из простого в использовании оборудования и среды программирования. Наиболее распространенным типом оборудования является Arduino UNO, а среда программирования называется Arduino IDE. Кроме Arduino UNO существует еще достаточно много аналогичных плат — Arduino Mega, nano, mini, но в данной статье в целях обучения мы будем использовать именно Arduino UNO. А Arduino IDE – это как раз та программная среда, с помощью которой мы будем программировать плату Arduino UNO.
Дистанционное управление «умным» домом
Для подключения платы к интернету, понадобится:
- Wi-Fi-адаптер, настроенный на прием и передачу сигнала через маршрутизатор;
- или подключенный через Ethernet кабель Wi-Fi роутер.
Также, есть вариант дистанционного управления по блютуз. Соответственно, к плате должен быть подключен Bluetooth модуль.
Есть несколько вариантов управления умным домом Arduino: с помощью приложения для смартфона или через веб. Рассмотрим каждое подробнее.
Приложения управления
Так как данная система-конструктор – не закрытая экосистема, то и приложений, реализованных для нее очень много. Они отличаются друг от друга не только интерфейсом, но и выполнением различных задач.
Blynk
Приложение на андроид и iOS с отличным дизайном, позволяет разрабатывать проекты, имеющие напрямую доступ к триггеру событий, на плате Ардуино. Но для работы приложения нужно интернет подключение, иначе взаимодействовать с ним не возможно.
Virtuino
Крутое бесплатное приложение на Android, позволяющее совмещать проекты в одно целое и управлять с помощью Wi-Fi или Bluetooth сразу несколькими платами.
Разрешает создавать визуальные интерфейсы для светодиодов, переключателей, счетчиков, приборов аналоговой схематехники. В нем есть учебные материалы и библиотека знаний о процессе работы с системой.
Bluino Loader – Arduino IDE
Приложение для телефона, представляет собой программную среду для кодирования Arduino. С его помощью можно быстро и легко скомпилировать код в файл, а затем отправить по OTG-переходнику на плату.
Arduino Bluetooth Control
Приложение контролирует контакты Arduino и управляет основными функциями по Блютузу. Но, программа не направлена на удаленное управление, только мониторинг.
RemoteXY: Arduino Control
С помощью приложения пользователь может создать свой собственный интерфейс управления платой. Подключение происходит с помощью Wi-Fi, Блютуз или интернет, через облачный сервер.
Bluetooth Controller 8 Lamp
Созданное с помощью Bluetooth-модулей HC-05, HC-06 и HC-07 приложение, обеспечивает восьмиканальный контроль. Таким способом достигается контроль и регулирование работы Ардуино, в соответствии с каждым из 8 светодиодов.
BT Voice Control for Arduino
Приложение специально заточено под дистанционное управление данными с ультразвукового датчика, подключенного по блютуз через Arduino. Реализуется подключения через модуль HC-05.
Подключившись, ультразвуковой датчик сможет передавать информацию о расстоянии до объекта, которая отобразится в интерфейсе приложения на телефоне.
IoT Wi-Fi контроллер
Приложение с интерфейсом, информирующем о конфигурации каждого входа/выхода в плате Arduino. В утилите можно переключать в реальном времени GPIO и показывать значение АЦП.
Веб-клиент
Управлять удаленно платой умного дома можно, разместив получение и обработку данных умного дома на веб-сервере. Естественно, сервер для умного дома Ардуино нужно создавать самостоятельно.
Для этих целей понадобится Arduino Ethernet Shield – сетевое расширение для пинов Ардуино Уно, позволяющее добавить разъем RJ-45 для подключения к сети.
При удаленном подключении, необходимо обеспечить внешнее питание платы не от USB.
Затем, подключите по USB плату к компьютеру, а по Ethernet плату к роутеру, которой раздает интернет компьютеру. При правильном установлении соединения, вы увидите зеленый свечение на порту.
После этого, нужно использовать библиотеки шилдов Ethernet и в среде разработки IDE написать код для создания сервера и отправки данных на сервер. Пример самодельного сервера неплохо описан в данной инструкции.
https://youtube.com/watch?v=ByvjWLtpL6o
Уведомления по SMS
С помощью подключаемой библиотеки GSM в Arduino IDE можно:
- Работать с голосовыми вызовами.
- Получать и отправлять СМС.
- Подключаться к Интернету через GPRS.
Работает схема через специальную плату расширения GSM, содержащую специальный модем.
О создании универсальной сигнализации на Arduino, с отправкой СМС уведомления на смартфон можно узнать из соответствующей видеоинструкции.
https://youtube.com/watch?v=WbtQaFot78E
Помехи и защита от них
Индуктивный выброс напряжения
Мотор – это индуктивная нагрузка, которая в момент отключения создаёт индуктивные выбросы. У мотора есть щетки, которые являются источником искр и помех за счёт той же самой индуктивности катушки. Сам мотор потребляет энергию не очень равномерно, что может стать причиной помех по линии питания, а пусковой ток мотора так вообще сильно больше рабочего тока, что гарантированно просадит слабое питание при запуске. Все четыре источника помех могут приводить к различным глюкам в работе устройства вплоть до срабатывания кнопок на цифровых пинах, наведения помех на аналоговых пинах, внезапного зависания и даже перезагрузки микроконтроллера или других железок в сборе устройства.
Отсечь индуктивный выброс с мотора можно при помощи самого обычного диода, чем мощнее мотор, тем мощнее нужен диод, то есть на более высокое напряжение и ток. Диод ставится встречно параллельно мотору, и чем ближе к корпусу, тем лучше. Точно таким же образом рекомендуется поступать с электромагнитными клапанами, соленоидами, электромагнитами и вообще любыми другими катушками. Логично, что диод нужно ставить только в том случае, если мотор или катушка управляется в одну сторону. Важные моменты:
- При работе с драйвером и управлением в обе стороны диод ставить не нужно и даже нельзя!
- При управлении ШИМ сигналом рекомендуется ставить быстродействующие диоды (например серии 1N49xx ) или диоды Шоттки (например серии 1N58xx).
- Максимальный ток диода должен быть больше или равен максимальному току мотора.
- Защитный диод, принимающий на себя обратный выброс ЭДС самоиндукции, также называется шунтирующим диодом, снаббером, flyback диодом.
- В природе существуют мосфеты со встроенным защитным диодом. Этот диод является отдельным элементом и такой мосфет обычно имеет нестандартный корпус, читайте документацию на конкретный транзистор.
- Диод, который показан на схематическом изображении мосфета, не является защитным диодом: это слабый и медленный “паразитный” диод, образованный при производстве транзистора. Он не защитит мосфет от выброса, нужно обязательно ставить внешний!
Помехи от щёток
Искрящиеся щетки мотора, особенно старого и разбитого, являются сильным источником электромагнитных помех, и здесь проблема решается установкой керамических конденсаторов с ёмкостью 0.1-1 мкФ на выводы мотора. Такие же конденсаторы можно поставить между каждым выводом и металлическим корпусом, это ещё сильнее погасит помехи. Для пайки к корпусу нужно использовать мощный паяльник и активный флюс, чтобы залудиться и припаяться как можно быстрее, не перегревая мотор.
Помехи по питанию, просадка
Мотор потребляет ток не очень равномерно, особенно во время разгона или в условиях переменной нагрузки на вал, что проявляется в виде просадок напряжения по питанию всей схемы. Беды с питанием решаются установкой ёмких электролитических конденсаторов по питанию, логично что ставить их нужно максимально близко к драйверу, то есть до драйвера. Напряжение должно быть выше чем напряжение питания, а ёмкость уже подбирается по факту. Начать можно с 470 мкф и повышать, пока не станет хорошо.
Разделение питания
Если описанные выше способы не помогают – остаётся только одно: разделение питания. Отдельный малошумящий хороший источник на МК и сенсоры/модули, и отдельный – для силовой части, в том числе мотора. Иногда ради стабильности работы приходится вводить отдельный БП или отдельный аккумулятор для надёжности функционирования устройства.
Экранирование
В отдельных случаях критичными являются даже наводки от питающих проводов моторов, особенно при управлении ШИМ мощными моторами и управлении мощными шаговиками в станках. Такие наводки могут создавать сильные помехи для работающих рядом чувствительных электронных компонентов, на аналоговые цепи, наводить помехи на линии измерения АЦП и конечно же на радиосвязь. Защититься от таких помех можно при помощи экранирования силовых проводов: экранированные силовые провода не всегда удаётся купить, поэтому достаточно обмотать обычные провода фольгой и подключить экран на GND питания силовой части. Этот трюк часто используют RC моделисты, летающие по FPV.
Распиновка платы Arduino Nano
На рисунке указаны номера и назначения выводов Arduino Nano (вид со стороны, на которой расположен микроконтроллер Atmega328):
Расшифровка цвета:
— серый цвет — физический пин микроконтроллера Atmega328;
— светло серый цвет (PD0, PD1 и т.д.) — номер порта микроконтроллера, который доступен из программ на ассемблере;
— зеленый цвет (ADC0 и т.д.) — номера аналогивых выводов;
— голубой цвет — пины портов UART и SPI.
Назначение и обозначения выводов:
USB — USB-порт, предназначенный для подключения ардуины к компьютеру через USB-кабель (нужен Mini-B USB разъем).
VIN — сюда может подается питание от внешнего источника питания на 7-12 В (блок питания покупается отдельно). Напряжение будет подаваться на стабилизатор и понижаться до 5 В. Поэтому оптимально подавать на этот пин около 9 В.
5V — через этот пин также можно запитывать плату от источника питания на 5 вольт, однако напряжение должно быть более-менее стабильным, поскольку оно подается непосредственно на микроконтроллер (стабилизатор не задействован), и поэтому высокое напряжение может убить основной микроконтроллер.
3.3V — на этом пине будет висеть напряжение 3.3 В, которое формируется от внутреннего стабилизатора платы. Этот пин нужен для подключения некоторых внешних устройств, которым для работы требуется 3.3 В — обычно это всякие ЖК-дисплеи. Однако максимальный ток вывода при этом не должны превышать 50 мА.
GND — земля (Ground Pin).
AREF — опорное напряжение для аналоговых входов. Используется по необходимости (настраивается с помощью analogReference()).
IOREF — позволяет узнать рабочее напряжение микроконтроллера. Используется редка. На китайских платах отсутствует вовсе.
Reset — выполняет сброс микроконтроллера, подать низкий уровень на этот вход.
SDA, SCL — пины интерфейса TWI/I2C.
D0. D13 — цифровые входы/выходы. На вывод D13 висит встроенный светодиод, который загорается, если на вывод D13 подан уровень HIGH.
0 (RX), 1 (TX) — выводы порта UART (последовательный порт Serial).
A1. A5 — аналоговые входы (могут использоваться и в качестве цифровых).
Внешний вид платы Arduino Nano с подписанными выводами:
RX+TX LEDs — светодиоды — моргают, когда передаются данные через последовательный порт Serial UART (пины RX и TX).
Reset Button — кнопка для перезапуска микроконтроллера;
(остальные обозначения смотри выше)
FTDI USB chip — микросхема FTDI FT323RL, которая используется для связи ардуины с компьютером через USB-кабель. Со стороны ардуины это serial-интерфейс. На компьютер этот интерфейс будет доступен в виде виртуального COM-порта (должны быть установлены драйвера для чипа FTDI — обычно входят в состав IDE Arduino).
Миниатюрная платформа для создания прототипов и изучения микроэлектроники
- Описание
- Характеристики
- Схемы
- Распиновка
- Подключение
- Фотографии
Arduino.ru
Язык программирования устройств Ардуино основан на C/C++. Он прост в освоении, и на данный момент Arduino — это, пожалуй, самый удобный способ программирования устройств на микроконтроллерах.
Базовые и полезные знания, необходимые для успешного программирования под платформу Arduino:
|
|
Справочник языка Ардуино
Язык Arduino можно разделить на три раздела:
Операторы
Управляющие операторы
Синтаксис
Арифметические операторы
Операторы сравнения
Логические операторы
Унарные операторы
|
ДанныеКонстанты
Типы данных
Преобразование типов данных
Область видимости переменных и квалификаторы
|
ФункцииЦифровой ввод/вывод
Аналоговый ввод/вывод
Дополнительные фунции ввода/вывода
Работа со временем
Математические функции
Тригонометрические функции
Генераторы случайных значений
Внешние прерывания
Функции передачи данныхSerial |
Библиотеки Arduino
Servo — библиотека управления сервоприводами. EEPROM — чтение и запись энергонезависимой памяти микроконтроллера. SPI — библиотека, реализующая передачу данных через интерфейс SPI. Stepper — библиотека управления шаговыми двигателями.
Система питания
Чтобы Arduino Nano начала функционировать, её необходимо запитать одним из двух возможных способов, а именно:
- через USB-кабель при подключении к компьютеру или другому источнику питания 5V.
- при помощи внешнего стабилизированного источника питания, напряжение которого должно лежать в диапазоне 6-20V (рекомендуется 7-12V). Данное напряжение подаётся непосредственно на вход VIN платы Arduino Nano.
Примечание. Если одновременно подключить два источника питания, то плата выберет тот, потенциал которого будет выше. Независимо от способа подключения, вывод GND платы Arduino Nano является общим минусом.
Что касается портов ввода-вывода, то следует помнить, что они работают с напряжениями 0-5V. Любое превышение, несмотря на встроенные ограничительные диоды, может вывести микроконтроллер из строя. То же самое касается и нагрузочной способности порта. Максимальный ток, который может выдать один вывод, равен 40мА, а суммарный ток всех выводов не должен превышать значение 200мА.
Также плату Arduino Nano можно использовать для питания мелкой периферии. Для этого на ней предусмотрены выводы 5V и 3.3V. Первое напряжение формируется встроенным линейным стабилизатором LM1117IMPX-5.0, а второе берётся с четвёртого вывода микросхемы-конвертора CH340G (у платы Arduino Uno для этого предусмотрен свой отдельный стабилизатор). Следовательно, использовать напряжение 3.3V можно только в случае питания через разъём USB.
Элементы платы
Микроконтроллер ATSAMD21G18
Мозгом платформы Arduino MKR Wi-Fi 1010 является 32-разрядный микроконтроллер фирмы Microchip (Atmel) — ATSAMD21G18 с вычислительном ядром ARM Cortex M0.
Благодаря использованию 32-разрядного ядра ARM, Arduino Nano IoT во многом превосходит типичные платы на базе 8-разрядных микроконтроллеров. Наиболее существенные отличия заключаются в следующем:
- 32-битное ядро позволяет обрабатывать четырёх-байтовые данные всего за один такт.
- Тактовая частота – 48 МГц.
- Объем памяти программ Flash – 256 КБ.
- Объем оперативной памяти SRAM – 32 КБ.
- Наличие DMA-контроллера позволяет разгрузить центральный процессор, выполняя ресурсоёмкие операции с памятью.
Беспроводной модуль NINA-W102
За беспроводную связь отвечает модуль U-blox NINA-W102 со встроенным чипом ESP32 для обмена данными по воздуху в диапазоне 2,4 ГГц по Wi-Fi и Bluetooth. Регулировка выходной мощности обеспечивает оптимальное соотношение между дальностью связи, скоростью передачи данных и энергопотреблением.
IMU-сенсор
IMU-сенсор на 6 степеней свободы включает в себя акселерометр и компас. Сборка выполнена на чипе LSM6DS3 по технологии (англ. System-in-Package — система в корпусе), где акселерометр и гироскоп лежат методом бутерброда в пластиковом корпусе.
Крипто-чип ATECC608A
Криптографический сопроцессор Microchip ATECC608A интегрирует протокол безопасности ECDH (Elliptic Curve Diffie Hellman) в сверхзащищенный метод, обеспечивающий согласование ключей для шифрования / дешифрования, наряду с ECDSA (алгоритм цифровой подписи эллиптической кривой) для проверки подлинности с подписью для Интернета вещей (IoT), включая домашнюю автоматизацию, промышленные сети, медицинские услуги, аутентификацию аксессуаров и расходных материалов.
Светодиодная индикация
| Имя светодиода | Назначение |
|---|---|
| ON | Информационный индикатор питания |
| L | Пользовательский светодиод на пине микроконтроллера. Используйте определение для работы со светодиодом. При задании значения высокого уровня светодиод включается, при низком – выключается. |
Понижающий регулятор 3V3
Импульсный понижающий регулятор напряжения MPM3610 обеспечивает питание микроконтроллера и другой логики платформы при подключении платформы через пин . Диапазон входного напряжения от 5 до 18 вольт. Выходное напряжение 3,3 В с максимальным выходным током 1,2 А.
Кнопка RESET
Пользовательская кнопка с двумя полезными функциями:
- Один клик (Single Сlick): служит для сброса микроконтроллера.
- Двойной клик (Double Click): переводит микроконтролер в BOOT-режим, который пригодиться при зависании платы или дургих сбоев в программе.
Подключение вашей платы Arduino к компьютеру
После того как вы установили Arduino IDE на свой компьютер следующим логичным шагом будет подключение платы Arduino UNO к компьютеру. Чтобы сделать это просто используйте кабель для программирования (синего цвета) и соедините его с платой Arduino и USB портом вашего компьютера.
Синий кабель для программирования может выполнять следующие три функции:
- Он запитывает плату Arduino UNO, то есть чтобы обеспечить выполнение программ на ней необходимо просто запитать ее с помощью USB кабеля.
- Через него программируется микроконтроллер ATmega328, находящийся на плате Arduino UNO. То есть код программы пересылается из компьютера в микроконтроллер именно по этому кабелю.
- Он может функционировать в качестве кабеля для последовательной связи, то есть с его помощью можно передавать данные с Arduino UNO в компьютер – это полезно для целей отладки программы.
После того как вы подадите питание на плату Arduino UNO на ней загорится маленький светодиод – это свидетельствует о том, что на плату подано питание. Также вы можете заметить как мигает другой светодиод – это результат работы программы по управлению миганием светодиода, которая по умолчанию загружена в вашу плату ее производителем.
Поскольку вы подключаете плату Arduino в первый раз к компьютеру необходимо некоторое время чтобы драйвера для нее успешно установились. Чтобы проверить правильно ли все установилось и определилось откройте «Диспетчер устройств (Device manager)» на вашем компьютере.
В диспетчере устройств откройте опцию «Порты» “Ports (COM & LPT)”, кликните на ней и посмотрите правильно ли отображается там ваша плата.
При этом стоит отметить, что не стоит обращать внимание на то, какой номер порта отобразился у вашей платы Arduino – он может, к примеру, выглядеть как CCH450 или что то подобное. Этот номер порта просто определяется производителем платы и больше ни на что не влияет
Если вы не можете в диспетчере устройств найти опцию “Ports (COM & LPT)”, то это означает, что ваша плата не корректно определилась компьютером. В большинстве случает это означает проблему с драйверами – по какой то причине они автоматически не установились для вашей платы. В этом случае вы должны будете вручную установить необходимые драйверы.
В некоторых случаях в указанной опции диспетчера устройств может отобразиться два COM порта для вашей платы и вы не будете знать какой из них правильный. В этой ситуации отключите и снова подключите плату Arduino к компьютеру – какой из COM портов при этом будет появляться и исчезать, значит тот и правильный порт.
Следует помнить о том, что номер COM порта будет изменяться при каждом новом подключении вашей платы к компьютеру – не пугайтесь, в этом нет ничего страшного.
Что еще можно сделать?
Мы создали одно из простейших устройств, но возможности по работе с Ардуино и другими микроконтроллерами, на самом деле, безграничны. С помощью разных дополнительных сенсоров можно реализовать много всяких устройств:
- Анемометр — стационарный прибор для измерения скорости ветра;
- Акселерометр — сенсор, позволяющий определять ускорение и ориентацию в пространстве;
- Аналоговый термометр — аналоговый сенсор для измерения температуры;
- Барометр — сенсор, позволяющий определять атмосферное давление и температуру;
- Датчик влажности почвы — сенсор, позволяющий узнать о пересыхании земли
- Датчик водорода — датчик для обнаружения водорода;
- Датчик тока — аналоговый сенсор для измерения силы тока;
- Датчик уровня воды — цифровой датчик уровня воды в ёмкости;
- Датчик температуры и влажности — сенсор, предоставляющий информацию об окружающей температуре и влажности в виде цифрового сигнала;
- Датчик пульса — аналоговый датчик для измерения частоты сердечных сокращений
- Гироскоп — сенсор, позволяющий определять собственную угловую скорость.
Это лишь малая часть датчиков и сенсоров, которые вы можете использовать для создания своих устройств. Мы уже много интересного сделали и в планах еще много всего интересного сделать
Желаем вам отличных проектов. Подписывайтесь на нашу группу ВКонтакте.
Шаг 1. Изменения в оригинальной версии
Прежде всего давайте поговорим об изменениях, которые собираемся внести в оригинальную схему Arduino Uno, которую вы можете увидеть выше или скачать ниже.
Изменения будут следующими:
- Мы не будем использовать какие-либо компоненты SMD. Все элементы будут в формате сквозных отверстий.
- Мы не нашли ни одного чипа FTDI в формате сквозного отверстия, поэтому преобразование USB в TTL не будет выполняться. Для программирования нового Arduino будет использоваться отдельная отладочная плата FTDI.
- Оригинальный Arduino использует компаратор Mosfet, чтобы определить, подключаем ли мы плату с помощью источника питания USB или постоянного тока. Но в нашей версии мы будем вручную переключать это с помощью перемычки.
- Традиционно используется микросхема LP2985 от Texas Instruments, чтобы получить источник питания 3,3 В на борту. Но из-за недоступности платы в формате TH мы будем использовать простой линейный регулятор. Таким образом, LM1117 должен быть очевидным выбором, но чтобы сохранить стоимость изготовления еще ниже, мы будем использовать LM317 с R1 и R2 как 240E и 390E соответственно.
- Последнее, что нужно на плате, — это достаточное количество линий питания и два разъема для каждого порта IO ввода-вывода. Поэтому мы будем размещать ряд разъемов папа и мама вокруг платы, что поможет подключить большее количество устройств непосредственно к Arduino.
Учитывая все изменения, мы можем записать окончательный список компонентов.