Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
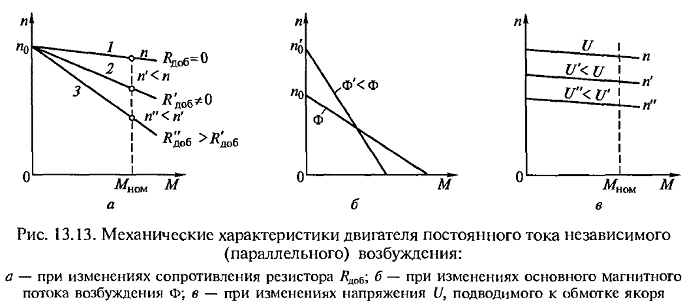
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
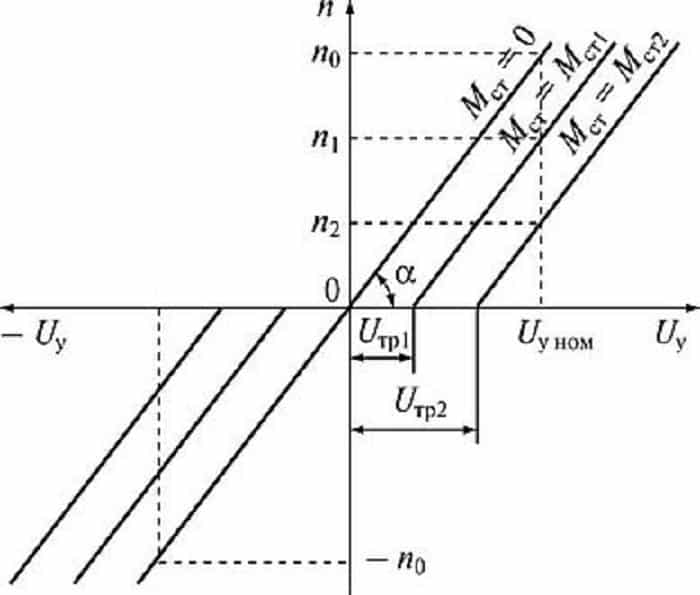
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения
В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения
Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.
Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2. а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Область применения
Область применения синхронных двигателей обусловлена рядом их особенностей, а именно:
- — стабильностью частоты вращения как при колебании напряжения в питающей электросети, так и при изменении величины механической нагрузки на валу;
- — возможностью работы с очень высоким коэффициентом мощности — вплоть до единицы.
Первое качество делает синхронные двигатели незаменимыми в качестве приводных для прецизионных обрабатывающих станков. Также часто синхронные двигатели используются для привода мощных насосных, компрессорных и вентиляционных установок. Этим же свойством обусловлено их практически исключительное применение в качестве гидрогенераторов и турбогенераторов на электрических станциях. Вторая особенность синхронных двигателей делает привлекательным его использование в качестве источника реактивной энергии, что позволяет гибко регулировать значение коэффициента мощности и уровня напряжения в сети. При правильном заключении договоров на электроснабжение можно получить экономию средств, имея повышенное значение косинуса-фи. При работе синхронного двигателя с коэффициентом мощности, равном единице, двигатель потребляет из сети только активную мощность, за счет чего снижаются потери мощности в питающих линиях электропередачи. Это обусловлено тем, что потери в линиях пропорциональны полной электрической мощности, а величина последней в рассматриваемом случае снижается, что происходит за счет уменьшения реактивной составляющей вплоть до нуля. Работающий на холостом ходу в режиме перевозбуждения синхронный двигатель представляет собой синхронный компенсатор.
Мощный синхронный двигатель, оснащенный системами автоматической регулировки возбуждения с обратной связью по напряжению, а также форсирования тока возбуждения – это инструмент для регулирования и перераспределения потоков реактивной мощности и уровня напряжения в электрической сети. Выбор синхронных двигателей при проектировании и в процессе реконструкции электросетей крупных потребителей обеспечивает повышение устойчивости работы энергосистемы, разгрузку линий электропередачи, улучшение качества электроэнергии, дает возможность минимизировать затраты на покупку электрической энергии.
Источник
Принцип действия [ править | править код ]
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f : n c = 60 f p =<60f>
>>
При частоте 50 Гц получаем для p = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля n c > = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
Запуск электродвигателей синхронного типа
Самое сложное в работе синхронного мотора – это его запуск. Именно поэтому его используют крайне редко. Ведь конструкция усложняется за счет системы запуска. На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним. Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты. Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
После того, как будет достигнута требуемая скорость, происходит отключение разгонного двигателя. Магнитные поля, которые взаимодействуют в электрическом моторе, сами выводят его на работу в синхронном режиме. Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей – в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.

Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Благодаря удобству передачи на большие расстояния и легкости преобразования переменный ток успешно стал стандартом электроснабжения.
В сфере же производства электродвигателей его способность возбуждать переменное магнитное поле в статоре и соответственно индуцировать ток в короткозамкнутой обмотке ротора позволила создать асинхронные электродвигатели. В этом типе двигателей единственным испытывающим трение узлом остаются коренные подшипники якоря.
Ротор такого электродвигателя – это металлический цилиндр, в пазы которого под углом к оси вращения запрессованы или залиты токопроводящие жилы, на торцах ротора объединенные кольцами в одно целое. Переменное магнитное поле статора возбуждает в роторе, напоминающем беличье колесо, противоток и, соответственно, отталкивающее его от статора магнитное поле.
В зависимости от числа обмоток статора асинхронный двигатель может быть:
Однофазным – в этом случае главным недостатком двигателя становится невозможность самостоятельного запуска, так как вектор силы отталкивания проходит строго через ось вращения.
Для начала работы двигателю необходим или стартовый толчок, или включение отдельной пусковой обмотки, создающей дополнительный момент силы, смещающий их суммарный вектор относительно оси якоря.
Двухфазный электродвигатель имеет две обмотки, в которых фазы смещены на угол, соответствующий геометрическому углу между обмотками. В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
Такой двигатель становится способным к самостоятельному запуску, однако имеет трудности с реверсом. Поскольку в современном электроснабжении не используются двухфазные сети, фактически электродвигатели этого рода применяются в однофазных сетях с включением второй фазы через фазовращающий элемент (обычно – конденсатор).
Трехфазный асинхронный электродвигатель – наиболее совершенный тип асинхронного мотора, так как в нем появляется возможность легкого реверса – изменение порядка включения фазных обмоток изменяет направление вращения магнитного поля, а соответственно и ротора.
Коллекторные двигатели переменного тока используются в тех случаях, когда требуется получение высоких частот вращения (асинхронные электродвигатели не могут превышать скорость вращения магнитного потока в статоре – для промышленной сети 50 Гц это 3000 об/мин).
Кроме того, они выигрывают в пусковом крутящем моменте (здесь он пропорционален току, а не оборотам) и имеют меньший пусковой ток, меньше перегружая электросеть при запуске. Также они позволяют легко управлять своими оборотами.
Обратной стороной этих достоинств становится дороговизна (требуется изготовление ротора с наборным сердечником, несколькими обмотками и коллектором, который к тому же сложнее балансировать) и меньший ресурс. Помимо необходимости в регулярной замене стирающихся щеток, со временем изнашивается и сам коллектор.
Синхронный электродвигатель имеет ту особенность, что магнитное поле ротора индуцируется не магнитным полем статора, а собственной намоткой, подключенной к отдельному источнику постоянного тока.
Благодаря этому частота его вращения равна частоте вращения магнитного поля статора, откуда и происходит сам термин «синхронный».
Как и двигатель постоянного тока, синхронный двигатель переменного тока является обратимым:
- при подаче напряжения на статор он работает как электродвигатель;
- при вращении от внешнего источника он сам начинает возбуждать в фазных обмотках переменный ток.
Основная область использования синхронных электродвигателей – высокомощные приводы. Здесь увеличение КПД относительно асинхронных электромоторов означает значительное снижение потерь электроэнергии.
Также синхронные двигатели используются в электротранспорте. Однако, для управления скоростью в этом случае требуются мощные частотные преобразователи, зато при торможении возможен возврат энергии в сеть.
Типы синхронных машин
Существует несколько разновидностей подобных машин, это:
- Гидрогенератор – его ротор отличается наличием явновыращенных полюсов и используется при производстве электрической энергии, работает на низких оборотах.
- Турбогенератор – отличается неявнополюсной конструкцией генератора, работает при помощи турбин различного типа, скорость отличается большим количеством оборотов вала в минуту, может достигать до 6000 об/мин.
- Компенсатор – он вырабатывает реактивную мощность, не несет нагрузку, используется в целях повышения качества электрической энергии за счет улучшенного коэффициента мощности, служит для стабилизации напряжения.
- Асинхронизированная машина двойного питания – в ней производится подключение роторной и статорной обмоток от источника токов с разной частотой, происходит создание несинхронного режима работы. Отличается устойчивым режимом работы, служит преобразователем фазных токов, применяется для решения узкоспециализированных задач.
- Двухполюсный ударный генератор – работа заключается в использовании режима короткого замыкания, действует кратковременно в течение долей секунды, выполняет задачу для испытания аппаратуры высокого напряжения.
- Синхронные двигатели – подразделяются на ряд моделей, предназначенных для выполнения различных целей, это: шаговые модели, безредукторные, индукторные, гистерезисные, а также бесконтактные двигатели.
Похожие записи:
 Удельное электрическое сопротивление проводников
Удельное электрическое сопротивление проводников
 Короткое замыкание электропроводки
Короткое замыкание электропроводки
 Распределительное устройство
Распределительное устройство
 Подсветка колес на велосипеде 3 способами, какой вариант лучше?
Подсветка колес на велосипеде 3 способами, какой вариант лучше?
 Глава 1 общие сведения о системе проектирования печатных плат p-cad
Глава 1 общие сведения о системе проектирования печатных плат p-cad
 Приложение 2. лампы, применяемые на автомобиле газ 2705
Приложение 2. лампы, применяемые на автомобиле газ 2705