Аппаратное прерывание
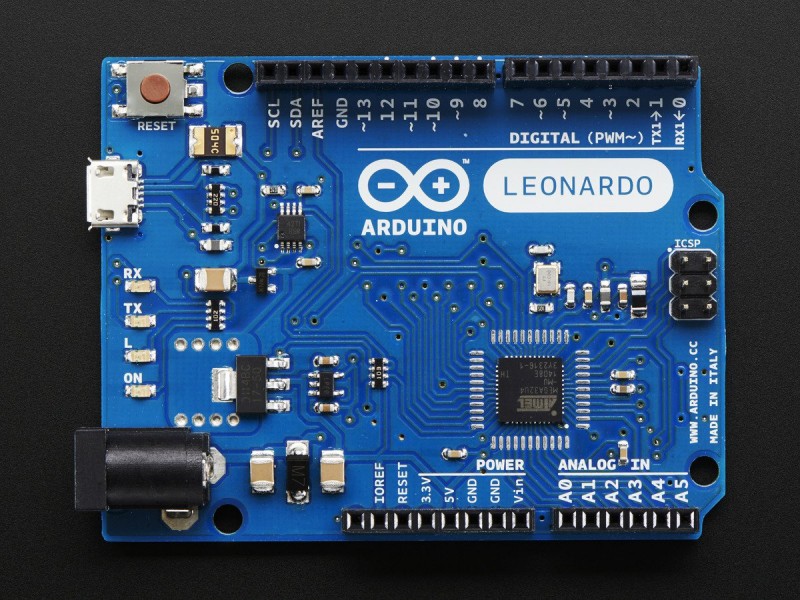
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.
Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Общая схема реверса электродвигателей
В промышленности и сельском хозяйстве нашли широкое применение различные типы трехфазных асинхронных электродвигателей. Они устанавливаются в электроприводах оборудования, служат составной частью автоматических устройств. Трехфазные агрегаты завоевали популярность, благодаря высокой надежности, простому обслуживанию и ремонту, возможности работы напрямую от сети переменного тока.
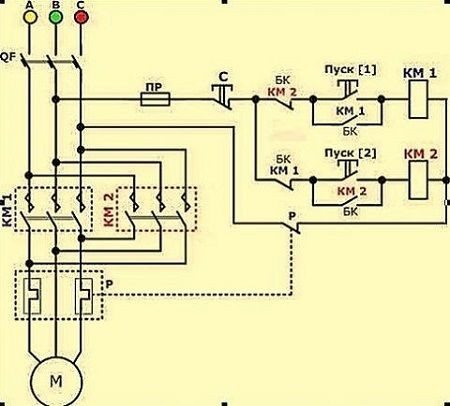
Специфика работы устройств, работающих с электродвигателями, предполагает необходимость изменения направления вращения вала, называемого реверсом. Для таких ситуаций разработаны специальные схемы, в состав которых включены дополнительные электрические приборы. Прежде всего, это вводный автомат, имеющий соответствующие параметры, контакторы (2 шт.), тепловое реле и элементы управления в виде трех кнопок, объединенных в общий кнопочный пост.
Для того чтобы вал начал вращаться в противоположную сторону, необходимо изменить расположение фаз подаваемого напряжения. Необходим постоянный контроль над значением напряжения, поступающего на электродвигатель и катушки контакторов. Непосредственное выполнение реверса в трехфазном двигателе осуществляется контакторами (КМ) № 1 и № 2. При срабатывании контактора № 1, фазы поступающего напряжения будут располагаться иначе, нежели при срабатывании контактора № 2.

Для управления катушками обоих контакторов предусмотрены три кнопки – ВПЕРЕД, НАЗАД и СТОП. Они обеспечивают питание катушек в зависимости от расположения фаз. Порядок включения контакторов влияет на замыкание электрической цепи таким образом, что вращение вала двигателя в каждом случае происходит строго в определенную сторону. Кнопку НАЗАД необходимо только нажать, но не удерживать, так как она сама оказывается в нужном положении под действием самоподхвата.
На всех трех кнопках установлена блокировка, предотвращающая их одновременное включение. Несоблюдение этого условия может привести к возникновению в электрической цепи короткого замыкания и выходу из строя оборудования. Для блокировки кнопок используется специальный блок-контакт, расположенный в соответствующем контакторе.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Объяснение принципа работы синхронного электродвигателя для «чайников»
С детства мы помним, что два магнита, если их приблизить друг к другу, в одном случае притягиваются, а в другом отталкиваются. Происходит это, в зависимости от того, что какими сторонами магнитов мы их соединяем, разноимённые полюса притягиваются, а одноимённые отталкиваются. Это – постоянные магниты, у которых магнитное поле присутствует постоянно. Существуют и переменные магниты.
В школьном учебнике по физике есть рисунок, где изображён электромагнит в виде подковы и рамка с полукольцами на концах, которая расположена между его полюсами.
При расположении рамки в горизонтальном положении в пространстве между полюсами магнитов, из-за того, что магнит притягивает разноимённые полюса и отталкивает одноимённые, на рамку подаётся ток, одинакового знака. Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
В этом заключается принцип работы электродвигателя. Причём, примитивного синхронного электродвигателя!
Ротор синхронного электродвигателя будет вращаться с такой же частотой, с какой меняется ток, подаваемый на клеммы обмотки, т.е. синхронно. Отсюда название этого электродвигателя.
Прототип на базе микросхемы MC33035
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.
Данная микросхема:
- Отвечает за всю логическую часть контроллера
- Считывает показания с датчиков Холла
- Определяет положения вала
- Выдаёт сигналы для затворов Н-моста на их драйверы
- Имеет возможность подключения индикатора ошибок, перегрева
- Обрабатывает и передает ШИМ-сигнал (PWM)
- Осуществляет реверс (обратный ход колеса)
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов. Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Схема с MC33035
Печатная плата
Готовый вариант
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.
В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером
Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр)
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
“>
Нереверсивное подключение электродвигателя
Специалисты для лучшего понимания реверсного пуска электродвигателя предлагают рассмотреть, как работает нереверсивная схема включения электрического двигателя. В конкретном примере рассматривается пускатель с катушкой управления 220 вольт. Электродвигатель подключается к цепи по следующей цепочке:
- автоматический трехфазный выключатель;
- силовые клеммы пускателя (КМ);
- тепловое реле (ТР).
Катушка управления пускателя (КМ) с одной стороны подключена к рабочему нулю, а другая сторона через цепочку кнопок управления «Пуск» и «Стоп» — к фазе цепи.
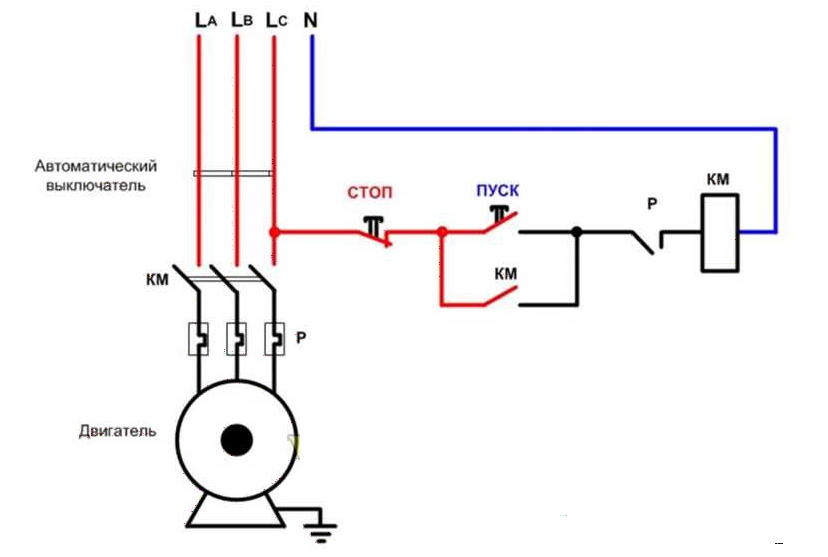
Подключение катушки 220 вольт
Пост управления (КМ) имеет две кнопки: «Пуск» и «Стоп»:
- у кнопки «Пуск» контакты нормально разомкнутого вида;
- у кнопки «Стоп» контакты нормально замкнутого вида.
Нормально разомкнутый контакт катушки управления включается параллельно пусковой кнопке. Тепловое реле в этой схеме играет для электродвигателя защитную функцию от перегрузки и включено в разрыв питающей фазы. Контакт нормально замкнутый (ТР) включается в цепь катушки управления (КМ).
После включения автоматического трехфазного выключателя напряжение поступает на силовые контакты пускателя и в управляющую цепь катушки — схема приведена в рабочее состояние.
Нереверсивный запуск
Для осуществления пуска электрического двигателя оператору необходимо нажать кнопку «Пуск», тогда в управляющую цепь катушки поступает напряжение, цепь замыкается и срабатывает, втягивая якорь с одновременным замыканием шунтирующего контакта катушки управления. Силовые контакты электрического двигателя получают питание, он начинает вращаться.
Когда оператор отпускает кнопку «Пуск», обмотка (КМ) получает питание от его вспомогательного контакта, двигатель работает.
Остановка
Оператору для остановки нереверсивного двигателя надо нажать кнопку «Стоп», в этом случае происходит разрыв питания катушки управления (КМ), шунтирующий контакт размыкается, якорь катушки приходит в начальное положение, тем самым размыкая силовые контакты. На электродвигателе пропадает напряжение, он останавливается.
Кода отпускается кнопка «Стоп», контакт управляющей обмотки остается разомкнутым, ожидая следующего пуска электросхемы.
Как происходит защита двигателя при нереверсивном пуске
Защита электрического двигателя реализуется при помощи биметаллических контактов (ТР), они изгибаются при увеличении тока, и расцепитель воздействует на контакт в пусковой обмотке, прекращая подачу электрической энергии. Все контакты пускателя (КМ) возвращаются в начальное положение, а двигатель останавливается. Ниже представлена принципиальная схема подключенного электродвигателя с защитой.
Установка монтажных предохранителей в цепочку защиты
В схеме защиты работы электрического двигателя предусматривается дополнительная защита управления пуском и остановкой механизма, это включение в цепь предохранителя, который реагирует на межвитковое замыкание катушки управления пускателя (КМ).
https://youtube.com/watch?v=URHgYTH3alo
Линейная скалярная рабочая характеристика ПЧ
При работе асинхронного электродвигателя от скалярного частотного преобразователя напряжение на двигателе понижается линейно с понижением частоты. Это происходит из-за того, что применяется широтно-импульсная модуляция (ШИМ), при которой отношение действующего напряжения к частоте является константой во всем диапазоне регулирования.
Вольт-частотная (вольт-герцовая) рабочая характеристика ПЧ будет линейной, пока напряжение на возрастет до предела, определяемого напряжением питания преобразователя. Скалярное управление не позволяет двигателю развить требуемую мощность на низких частотах (мощность зависит от напряжения), и момент на валу сильно падает.
Нереверсивная схема управления асинхронного двигателя.
В случае, если одна из электрифицированных задвижек окажется неисправной, промежуточное реле PIT разрывает цепи автоматического управления насосными агрегатами гидроэлеваторов. Такой пускатель состоит из двух простых пускателей, подвижные части которых между собой связаны механически с помощью устройства в виде коромысла.
При включённом трёхполюсном, выключателе Q1, выполненном в виде рубильника, нажатие пусковой кнопки S2 приводит к присоединению катушки линейного контактора K1 к источнику питания и включению главными замыкающими контактами K1. Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Простейшая схема управления электродвигателем может иметь только неавтоматический выключательQи предохранителиF или автоматический выключатель.
Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном неавтоматическом управлении. В приводах, где применяются двигатели с короткозамкнутым ротором, частоту вращения электродвигателя изменяют путем изменения числа пар полюсов. Мощность электродвигателя 29,5 кВт, пуск автоматизирован.
По истечении некоторого времени контакты К размыкаются и замыкаются контакты КУ. Начинается разгон через ограничивающие резисторы R1—R4.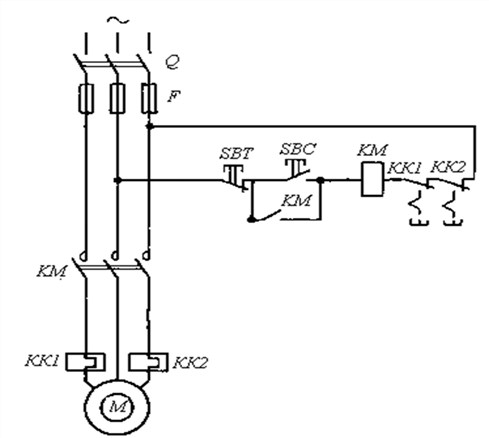
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и два тепловых реле защиты КК рис. Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором.
Типовые схемы управления электроприводами с асинхронными двигателями
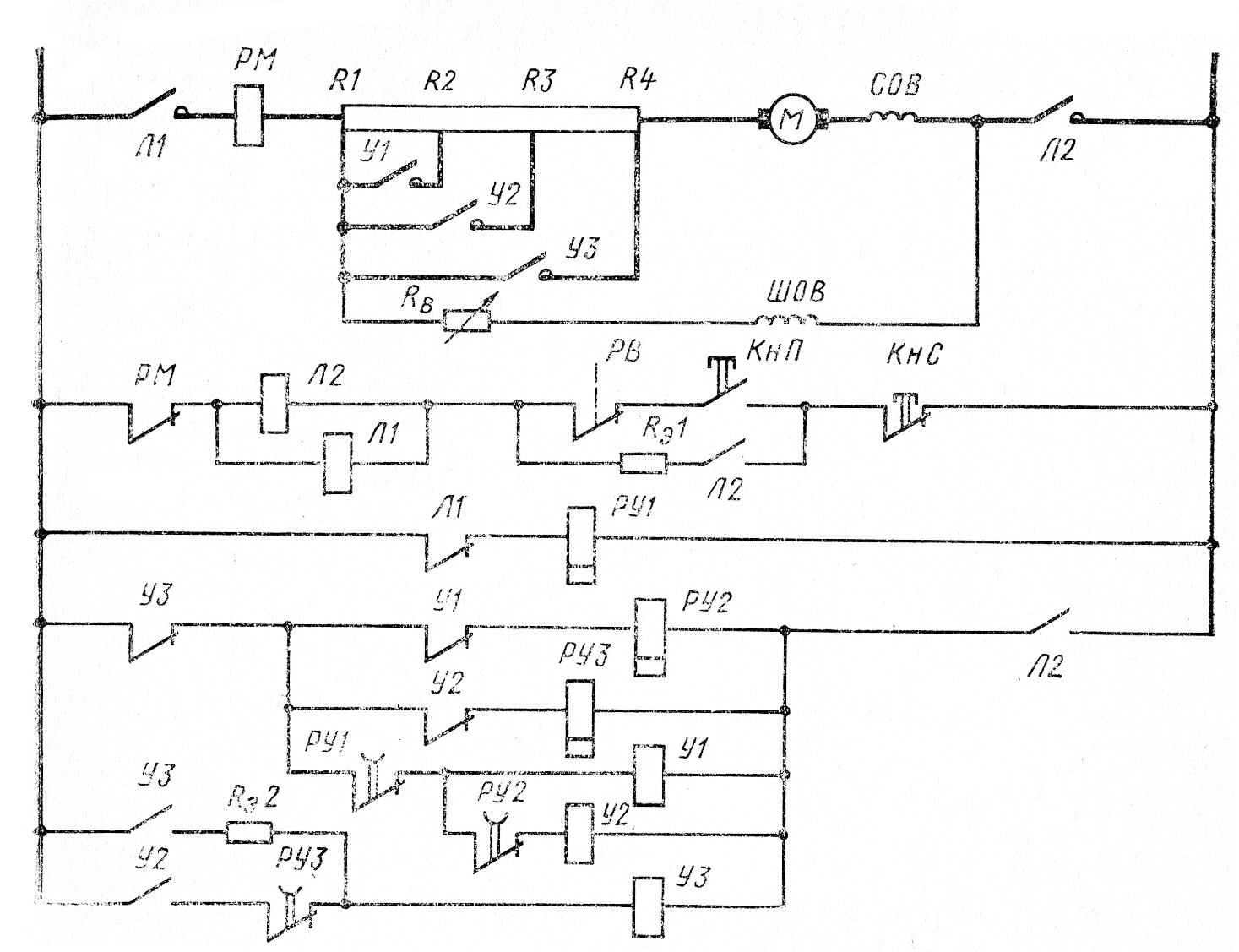
Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Происходит разбег двигателя по его естественной характеристике. Он срабатывает и своими главными контактами К подключает двигатель на трехфазное питание Л1, Л2, Л3. Принципиальная схема силовой части нереверсивного электропривода по системе ТП-Д Рис.
Электрические блокировки для предотвращения одновременного включения двух контакторов осуществляются с помощью размыкающих контактов КM1 и КM2 рисунок 6, б. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе. Одновременно контактор своим замыкающим вспомогательным контактом осуществляет самоблокировку, а размыканием другого вспомогательного контакта отключает катушки. При этом срабатывает контактор малой скорости, который обеспечивает главными замыкающими контактами K1. Нажатие остановочной кнопки S1 размыкает цепь катушки линейного контактора K1 и его главные контакты K1.
Так как привод конвейеров производится электродвигателями, то более подходящими для данного случая будут электрические или механические ЛЭ. После разбега двигателя до низкой частоты вращения может быть осуществлен его разгон до высокой частоты вращения. Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения Rд2, а также разрывает цепь катушки реле времени КТ. При использовании автотрансформаторов см. При этом речь может идти о потоках энергии различного вида: электрической, механической, тепловой и других.
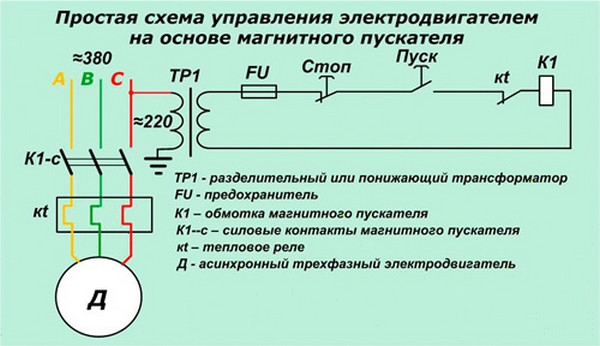
Как подключить магнитный пускатель. Схема подключения.
https://youtube.com/watch?v=xOXyvLWfTEc
Типовые схемы управления ад с короткозамкнутым ротором
Двигатели этого типа малой и средней мощности обычно пускаются прямым подключением к сети без ограничения пусковых токов. В этих случаях они управляются с помощью магнитных пускателей, которые одновременно обеспечивают и некоторые виды их защиты.
Схема управления асинхронным двигателем с использованием магнитного пускателя (рис. 2.1) включает в себя магнитный пускатель, состоящий из контактора КМ и трех встроенных в него тепловых реле защиты КК. Схема обеспечивает прямой (без ограничения тока и момента) пуск двигателя, отключение его от сети, а также защиту от коротких замыканий (предохранители FА) и перегрузки (тепловые реле КК).
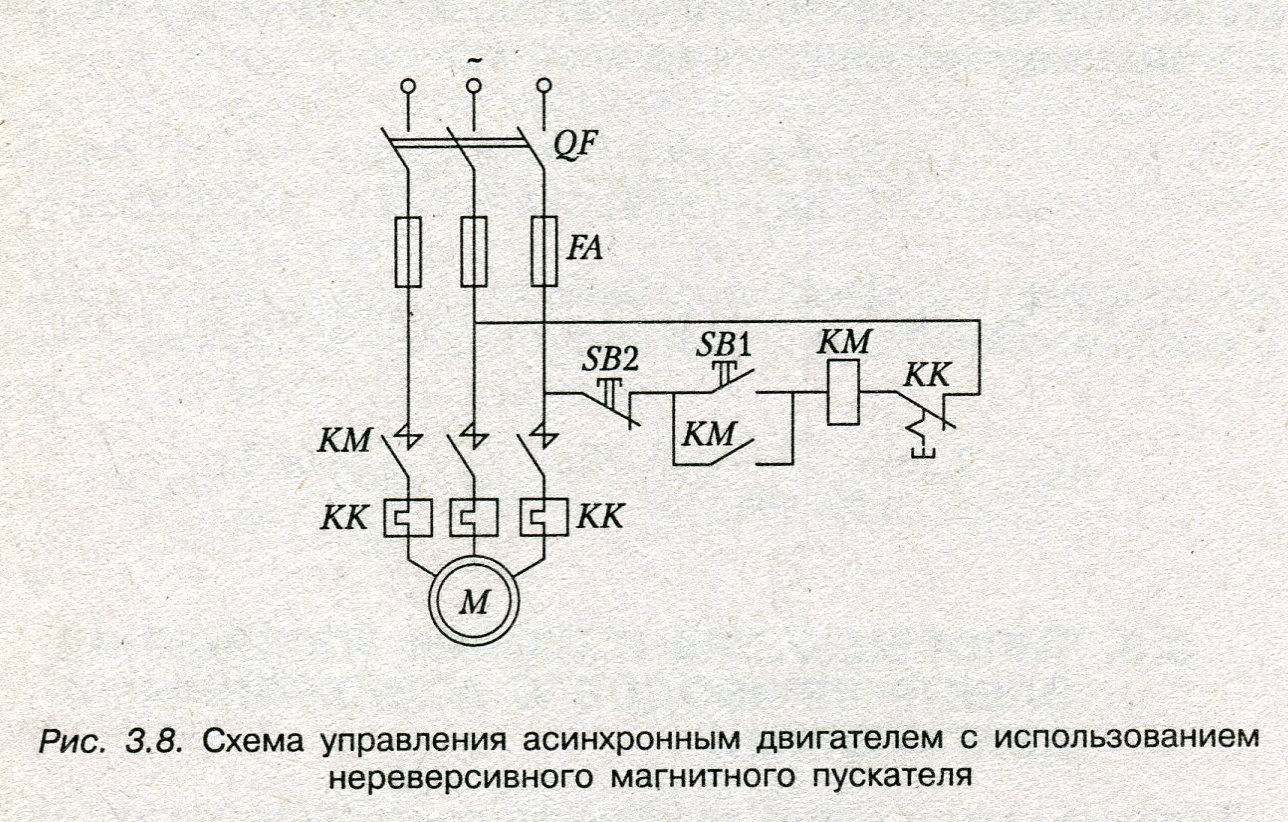
Рис. 2.1. Схема управления АД с использованием
нереверсивного магнитного пускателя
Для пуска двигателя замыкают выключатель QF и нажимают кнопку пуска SВ1. Получает питание катушка контактора КМ, который, включившись, своими главными силовыми контактами в цепи статора двигателя подключает его к источнику питания, а вспомогательным контактом шунтирует кнопку SВ1. Происходит разбег двигателя по его естественной характеристике. Для отключения двигателя нажимается кнопка остановки SВ2, контактор КМ теряет питание и отключает двигатель от сети. Начинается процесс торможения двигателя выбегом под действием момента нагрузки на его валу.
Кнопочный пост
Данное оборудование предназначается для коммутации, то есть соединения цепей, в которых протекает переменный ток с максимальным напряжением в 660 В и частотой 50 или 60 Гц. Можно эксплуатировать такие устройства и в сетях с постоянным током, но тогда максимальное рабочее напряжение ограничивается 440 В. Возможно применение даже в качестве пульта управления.
Обычный кнопочный пост имеет следующие особенности своей конструкции:
- Каждая из его кнопок лишена фиксации.
- Имеется кнопка «Пуск», которая чаще всего имеет не только зеленый цвет, но и контакты нормально-разведенного типа. Некоторые модели даже обладают подсветкой, которая включается после нажатия. Предназначение — введение в работу какого-либо механизма.
- «Стоп» — это кнопка, обладающая красным цветом (чаще всего). Располагается она на замкнутых контактах, а ее основное предназначение — это отключение какого-либо прибора от источника питания с целью остановки его работы.
- Отличие между некоторыми приборами состоит в материале, который используется для изготовления каркаса. Он может быть сделан из металла или пластмассы. В данном случае корпус играет важную роль, так как имеет определенную степень защиты, зависящую от материала.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Как работает
Принцип функционирования электродвигателя с фазным ротором основан на магнитном поле, которое вращается с угловой скоростью, зависящей от частоты сети и пар полюсов обмотки статора. Поле образовывается при соединении с сетью трехфазной намотки. Как правило, асинхронный мотор имеет намотку во много фаз (обычно три фазы), но существуют и однофазные.
Вам это будет интересно Соединение проводки в квартире
Статор и ротор асинхронного двигателя
При пересечении обмоток магнитное поле в соответствии с правилом электромагнитной индукции индуктирует электродвижущую силу в этих намотках. Если намотка ротора замкнута, ее электродвижущая сила вводит в электроцепи ротора энергию. Образуется электромагнитный момент.
Мотор назвали асинхронным из-за того, что угловая скорость ротора не равна угловой скорости вращения электромагнитного поля, то есть они двигаются несинхронно.
Процессы, проходящие в асинхронном электродвигателе, измеряют параметром под названием скольжение, который рассчитывается как разность угловых скоростей ротора и магнитного поля.
Обратите внимание! Скольжение бывает положительным и отрицательным в зависимости от режима функционирования электромотора. При идеальном холостом ходе оно равняется нулю, ротор и поле крутятся с равной быстротой
Никакой электродвижущей силы не образуется, ток и электромагнитный момент нулевые. При включении двигателя скольжение равняется 1 и при идеальном ходе постепенно достигает 0. Если вращать ротор в другую сторону относительно магнитного поля (разница угловых скоростей будет больше 1), появится тормозной момент, так как электродвигатель переходит в режим противовключения
При идеальном холостом ходе оно равняется нулю, ротор и поле крутятся с равной быстротой. Никакой электродвижущей силы не образуется, ток и электромагнитный момент нулевые. При включении двигателя скольжение равняется 1 и при идеальном ходе постепенно достигает 0. Если вращать ротор в другую сторону относительно магнитного поля (разница угловых скоростей будет больше 1), появится тормозной момент, так как электродвигатель переходит в режим противовключения.
Расчет скольжения
В соответствии со значением скольжения в ходе работы электродвигателя различают 3 режима его функционирования:
- противовключение (скольжение стремится от 1 до бесконечности);
- генераторный (скольжение от 0 до бесконечности);
- двигательный (скольжение стремится от единицы до нуля).
Схема реверса трехфазного двигателя, подключенного в однофазную сеть
Здравствуйте, уважаемые читатели и гости сайта «Заметки электрика».
Несколько дней назад от одного из читателей сайта я получил письмо с просьбой подробно рассказать о том, как осуществить реверс трехфазного асинхронного двигателя 380/220 (В), подключенного в однофазную сеть 220 (В).
Действительно, я как то упустил этот момент из виду и про реверс совсем забыл. Дело в том, что у меня уже имеется статья, где я рассказывал про выбор емкости рабочих и пусковых конденсаторов, собирал схему подключения трехфазного двигателя в однофазную сеть 220 (В) и даже снял видео на конкретном примере.
А сейчас вернемся к реверсу. Мудрить сложную схему я не буду, а покажу самый простой и самый распространенный вариант с помощью кнопки управления КУ-110111. Эту кнопку еще называют кнопочным выключателем или переключателем.
Вот так она выглядит.
Суть в том, что нам нужно две пары контактов: нормально-разомкнутый и нормально-замкнутый. И самое главное, чтобы управление этими контактами было фиксированным.
Вот как раз таки в этой кнопке имеется две пары контактов:
- (1-2) – нормально-разомкнутый
- (3-4) – нормально-замкнутый
В нашем случае управление контактами осуществляется с помощью рукоятки-переключателя, которая имеет два положения.
Когда переключатель установлен (зафиксирован) в вертикальном положении, то его контакт (1-2) разомкнут, а (3-4) замкнут. И наоборот, когда переключатель находится в горизонтальном положении (поворот рукоятки на 90° по часовой стрелке), то его контакт (1-2) замкнут, а (3-4) — разомкнут.
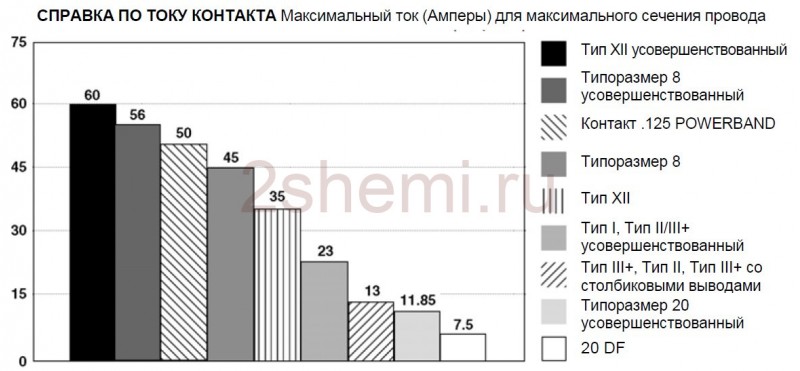
Номинальный ток контактных пар составляет 10 (А)
На это стоит обращать внимание, т.к. при выборе кнопки с заниженным номинальным током контакты могут выгореть. Например, для реверса двигателей мощностью до 0,4 (кВт) можно применять тумблер ТВ1-2
У него имеется 4 контактные группы: 2 нормально-разомкнутые и 2 нормально-замкнутые. Номинальный ток контактов составляет 5 (А)
Например, для реверса двигателей мощностью до 0,4 (кВт) можно применять тумблер ТВ1-2. У него имеется 4 контактные группы: 2 нормально-разомкнутые и 2 нормально-замкнутые. Номинальный ток контактов составляет 5 (А).
Реверс асинхронного трехфазного двигателя, подключенного в однофазную сеть
Все просто. Реверс осуществляется путем переключения питания конденсаторов с одного полюса питающего напряжения на другой. Это как раз и осуществляется с помощью кнопки управления. На схеме она показана в красном прямоугольнике.
В качестве примера рассмотрим уже известный нам трехфазный двигатель АОЛ 22-4 мощностью 0,4 (кВт) напряжением 220/127 (В). Для его запуска необходим рабочий конденсатор емкостью не ниже 25 (мкФ). Я использовал конденсатор чуть меньшей емкости – МБГО-1, 20 (мкФ), напряжение 500 (В).
В моем примере взят двигатель напряжением – 220/127 (В). Т.к. питающая сеть у нас 220 (В), то его обмотки должны быть соединены в звезду. Звезда уже собрана внутри этого двигателя и на клеммник выведено всего 3 вывода.
Сначала я устанавливаю на кнопке управления перемычку между клеммами (2) и (3). Затем к клемме (2) подключаю один вывод конденсатора.