От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
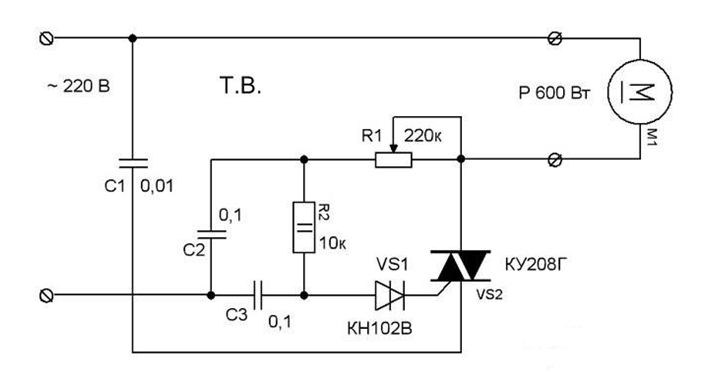
Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения. Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
Двухфазный двигатель
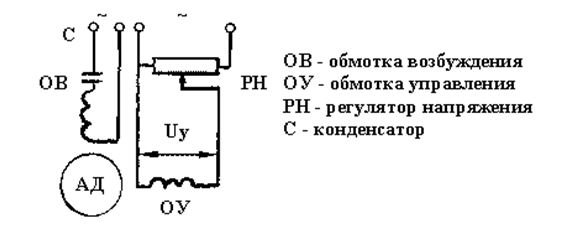
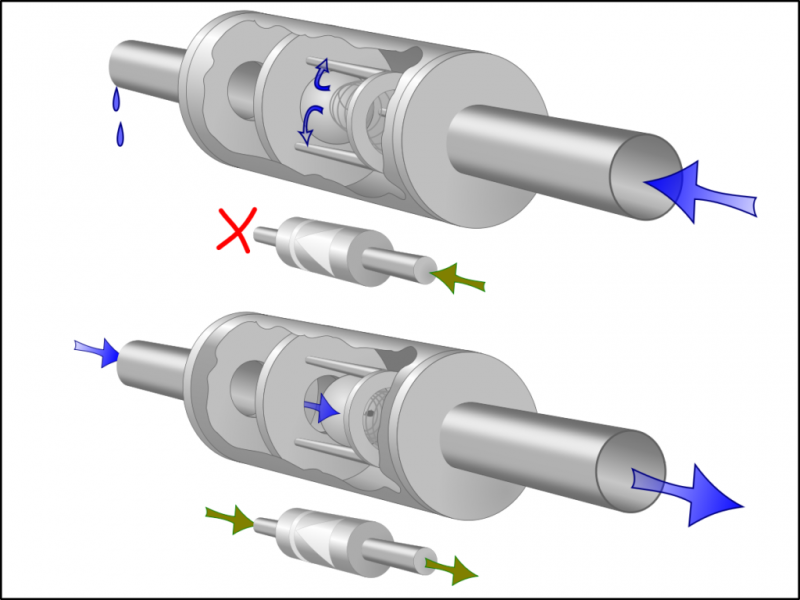
Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Есть две возможности контролирования числа оборотов:
- Менять амплитуду напряжения питания (Uy),
- Фазное – меняем емкость конденсатора.
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
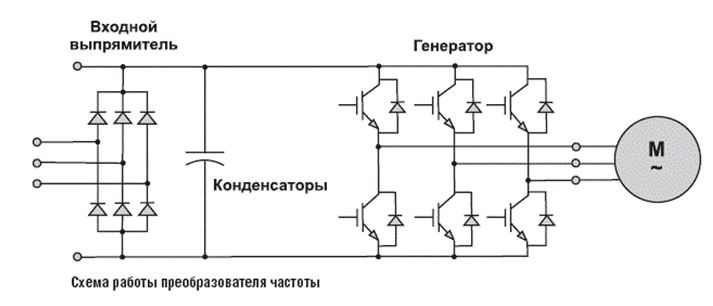
Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Асинхронный или коллекторный: как отличить
Вообще, отличить тип двигателя можно по табличке — шильдику — на которой написаны его данные и тип. Но это только в том случае, если его не ремонтировали. Ведь под кожухом может быть что угодно. Так что если вы не уверены, лучше определить тип самостоятельно.

Так выглядит новый однофазный конденсаторный двигатель
Как устроены коллекторные движки
Отличить асинхронный и коллекторный двигатели можно по строению. У коллекторных обязательно есть щетки. Они расположены возле коллектора. Еще обязательный атрибут движка этого типа — наличие медного барабана, разделенного на секции.
Такие двигатели выпускаются только однофазные, они часто устанавливаются в бытовой технике, так как позволяют получить большое число оборотов на старте и после разгона. Также они удобны тем, что легко позволяют менять направление вращения — необходимо только поменять полярность. Несложно также организовать изменение скорости вращения — изменением амплитуды питающего напряжения или угла его отсечки. Потому и используются подобные двигатели в большей части бытовой и строительной техники.
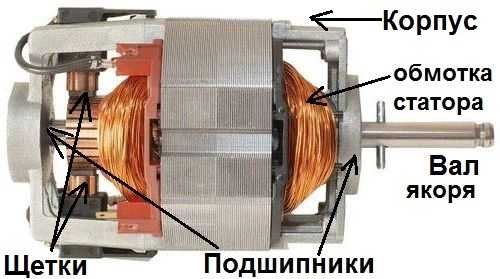
Строение коллекторного двигателя
Недостатки коллекторных двигателей — высокая шумность работы на больших оборотах. Вспомните дрель, болгарку, пылесос, стиральную машину и т.д.. Шум при их работе стоит приличный. На малых оборотах коллекторные двигатели не так шумят (стиральная машина), но не все инструменты работают в таком режиме.
Второй неприятный момент — наличие щеток и постоянного трения приводит к необходимости регулярного технического обслуживания. Если токосъемник не чистить, загрязнение графитом (от стирающихся щеток) может привести к тому, что соседние секции в барабане соединятся, мотор попросту перестанет работать.
Асинхронные
Асинхронный двигатель имеет статор и ротор, может быть одно и трёхфазным. В данной статье рассматриваем подключение однофазных двигателей, потому речь пойдет только о них.
Асинхронные двигатели отличаются невысоким уровнем шумов при работе, потому устанавливаются в технике, шум работы которой критичен. Это кондиционеры, сплит-системы, холодильники.
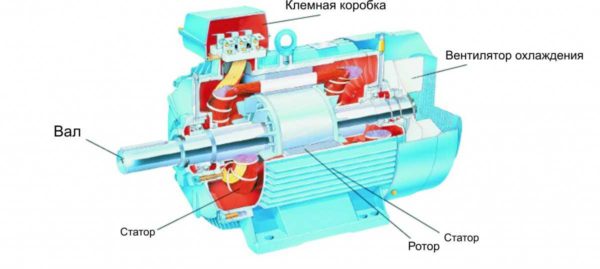
Строение асинхронного двигателя
Есть два типа однофазных асинхронных двигателей — бифилярные (с пусковой обмоткой) и конденсаторные. Вся разница состоит в том, что в бифилярных однофазных двигателях пусковая обмотка работает только до разгона мотора. После она выключается специальным устройством — центробежным выключателем или пускозащитным реле (в холодильниках). Это необходимо, так как после разгона она только снижает КПД.
В конденсаторных однофазных двигателях конденсаторная обмотка работает все время. Две обмотки — основная и вспомогательная — смещены относительно друг друга на 90°. Благодаря этому можно менять направление вращения. Конденсатор на таких двигателях обычно крепится к корпусу и по этому признаку его несложно опознать.
Более точно определить бифилярный или конденсаторный двигатель перед вами, можно при помощи измерений сопротивления обмоток. Если сопротивление вспомогательной обмотки больше в два раза (разница может быть еще более значительная), скорее всего, это бифилярный двигатель и эта вспомогательная обмотка пусковая, а значит, в схеме должен присутствовать выключатель или пусковое реле. В конденсаторных двигателях обе обмотки постоянно находятся в работе и подключение однофазного двигателя возможно через обычную кнопку, тумблер, автомат.
https://youtube.com/watch?v=XXxPz3_f4hY
https://youtube.com/watch?v=N8fTC5IOVFY
https://youtube.com/watch?v=ZYYFLX6PxBg
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Подписка на рассылку
Порядка 70 % потребляемой промышленностью мощности, приходится на электропривод. Огромное разнообразие технологических процессов диктует свои правила, вследствие чего, появилась необходимость в изменении скорости вращения электродвигателя непосредственно во время технологического процесса. В данной статье мы раскроем различные способы регулирования скорости вращения электродвигателей.
Параметры, изменив которые, мы изменим скорость двигателя переменного тока (ДПТ):
Изменяемые параметры для ДПТ:
Частотное регулирование
Наиболее эффективный, постоянно совершенствующийся способ. Применение: двигатели переменного тока (синхронные и асинхронные с кз ротором). Корректируя частоту питающего напряжения, мы изменим угловую скорость магнитного поля статора, следовательно, скорость двигателя в значительном диапазоне, имея достаточно жесткие механические характеристики. Для сохранения в норме коэффициента мощности и допустимости кратковременных перегрузок, меняя частоту, следует изменять и саму величину питающего напряжения.
Преимущества способа:
Регулирование изменением числа пар полюсов
Применение: т.к. промышленность не выпускает серийно синхронные двигатели с изменяемым количеством пар полюсов, будем считать, что способ актуален только для асинхронных двигателей (далее АД) с кз ротором. Способ реализуется изменением числа пар полюсов у обмоток. Этого можно добиться, изготовив двигатель с двумя независимыми обмотками. Но этот метод приводит к удорожанию конструкции и увеличению размеров машины. Поэтому наиболее выгодным является увеличение числа пар полюсов без использования второй независимой обмотки. Промышленностью выпускаются двухскоротсные, трёхскоростные и четырёхскоростные электродвигатели.
Достоинства:
Недостатки:
Добавочное сопротивление в цепи ротора
Применение: АД с фазным ротором. При изменении сопротивления ротора прямо пропорционально изменяется скольжение. Но величина критического момента остается постоянной. Это позволяет подобрать сопротивления так, чтобы уравнять критический момент с пусковым, что благоприятно сказывается на пуске двигателя под нагрузкой.
Достоинства способа:
Недостатки:
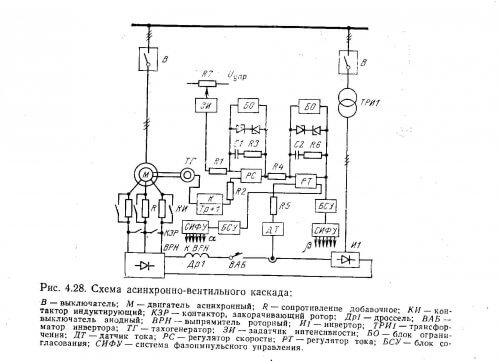
Асинхронный вентильный каскад
Применение: АД с фазным ротором.
Достоинства:
Недостатки:
Изменение напряжения питания якоря
Применение: любые ДПТ. Способ можно использовать если источником электрической энергии является генератор. Реализовать от общей сети невозможно.
Достоинства:
Недостатки:
Введение добавочного резистора в цепь якоря
Применение: любые ДПТ.
Заключается в последовательном включении в цепь якоря регулировочного реостата. Но способ не получил распространения ввиду своей неэкономичности и плохого влияния на КПД двигателя, т.к. в цепи реостата теряется очень большое количество энергии.
Регулирование изменением магнитного потока
В цепь возбуждения двигателей параллельного и смешанного возбуждения подключается реостат. В машинах последовательного возбуждения изменение магнитного потока в обмотке возбуждения производится шунтированием этой обмотки регулируемым сопротивлением. Максимальная скорость вращения двигателя ограничивается лишь механической прочностью якоря. Скорость двигателя регулируется в диапазонах 2:1-5:1, в частных случаях 8-10:1.
Устройство коллекторного двигателя
Коллекторный электродвигатель состоит из статора и ротора. Ротором называется часть, которая
вращается, а статор является неподвижным. Еще одной составляющей электродвигателя являются графитовые щетки, по которым ток течет к якорю. В зависимости от комплектации могут присутствовать датчики Холла, которые дают возможность плавного запуска и регулировки оборотов. Чем выше подаваемое напряжение, тем выше обороты. Этот тип может работать как от переменного, так и от постоянного тока.
По классификации коллекторные двигатели можно разделить на те, что работают от переменного и от постоянного тока. Их также можно разделить по типу возбуждения обмотки: двигатели с параллельным, последовательным и смешанным (параллельно-последовательным) возбуждением.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
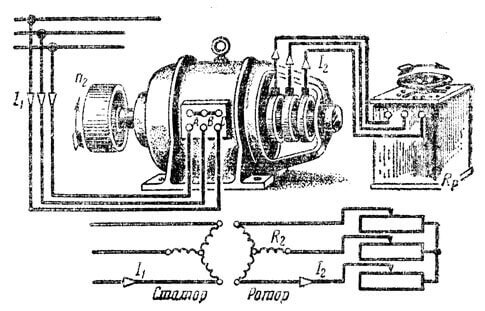
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
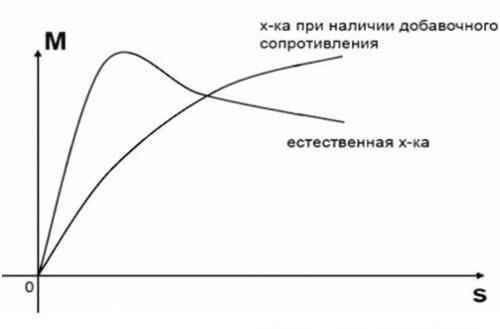
большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
5.13. ПУСК, РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И ТОРМОЖЕНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ.
На практике замечено, что
ток, потребляемый обмоткой статора в первый момент пуска двигателя, очень большой.
В ряде случаев он превышает номинальный ток в 6 — 10 раз.
Такой нагрузки может не
выдержать не только питающая сеть, но и сама обмотка статора. Поэтому для пуска
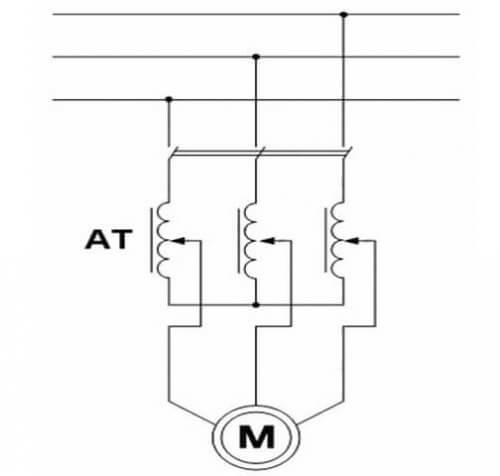
крупных асинхронных двигателей применяют специальные устройства, снижающие пусковой
ток. На рис. 5.13.1. показаны схемы пуска мощных двигателей с помощью реакторов
и автотрансформатора.
Принцип ограничения тока
заключается в том, что к статорной обмотке двигателя на период пуска подводится
пониженное напряжение. После разгона его дополнительные устройства от двигателя
отключаются.
Иногда для снижения напряжения,
подаваемого в обмотки статора, изменяют схему переключения обмоток. Например,
асинхронный двигатель нормально работает по схеме «треугольник». Если
на период пуска его обмотки включить «звездой», то на каждую фазу
придется напряжение в раз меньшее.
Двигатели с фазным ротором
пускаются в работу с помощью дополнительных сопротивлений. Вводя дополнительные
сопротивления в цепь ротора, добиваются ограничения пускового тока.
Регулирование частоты вращения асинхронного двигателя определяется формулой:
.
Здесь возможны три различных способа реализации:
Первый заключается в изменении
частоты тока f, подаваемого в обмотки двигателя. Этот способ позволяет осуществлять
плавное регулирование частоты вращения двигателя. Регуляторы частоты тока пока
еще очень дороги, поэтому они мало применяются.
Второй способ связан с изменением пар полюсов p на статоре.
Укладывая на статоре несколько
обмоток, рассчитанных на различные числа пар полюсов (р=1,2,3,4),
можно обеспечить различные частоты вращения магнитного поля (соответственно:
3000, 1500, 1000, 750 об/мин). Подключение к сети необходимой обмотки производится
специальным переключателем.
Этот способ регулирования
ступенчатый, но в ряде металлообрабатывающих станков он нашел самое широкое
применение (например, для привода продольно-строгального станка при рабочем
и обратном ходе).
Третий способ регулирования
частоты вращения возможен лишь для двигателей с фазным ротором. Здесь изменение
скольжения S достигается введением в цепь ротора регулировочных сопротивлений.
Такие схемы широко используются на грузоподъемных кранах.
К категории регулирования
вращения вала двигателя относится так называемое реверсирование, т.е. изменение
направления вращения на обратное. Осуществляется оно путем изменения порядка
чередования фаз обмотки статора. На рис. 5.13.2. показана схема изменения направления
вращения вала двигателя.
Торможение асинхронного двигателя может быть механическим и электрическим.
К механическим относятся торможения муфтами, электромагнитными лентами, колодками и т.д.
Иногда применяют электродинамическое
торможение, когда после отключения двигателя от сети переменного тока в его
обмотки подается постоянный ток. В этом случае постоянное магнитное поле заметно
сокращает выбег ротора.
Чаще используется торможение
«противовыключением». После отключения двигателя от сети его кратковременно
включают на вращение в обратную сторону. Как только оставшаяся частота вращения
ротора n2 станет равной нулю, двигатель отключается от сети.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
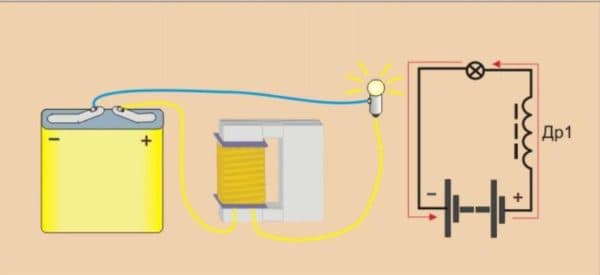
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
-
-
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
-
-
-
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
-
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
-
-
- низкая стоимость
- малая масса и размеры
-
-
-
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
-
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
-
-
-
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
-
-
-
-
-
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
-
-