Управление по напряжению (Voltage Mode)
В этом режиме скважность ШИМ сигнала, управляющего силовыми ключами, определяется непосредственно выходным напряжением. При гистерезисном управлении, если напряжение на выходе ниже нормы – идет «накачка» источника
Если напряжение на выходе больше порога – компаратор блокирует управление силовым ключом, идет разряд выходной накопительной емкости. В англоязычной литературе такой режим называют «hiccup-mode» – «режим с икотой»
При гистерезисном управлении, если напряжение на выходе ниже нормы – идет «накачка» источника. Если напряжение на выходе больше порога – компаратор блокирует управление силовым ключом, идет разряд выходной накопительной емкости. В англоязычной литературе такой режим называют «hiccup-mode» – «режим с икотой».
Данный режим используется сравнительно редко, так как сопровождается большими пульсациями выходного напряжения и требует накопительного конденсатора сравнительно высокой емкости.
Рисунок 5 демонстрирует принцип работы режима управления по напряжению с гистерезисным управлением. Здесь и далее не показана выходная часть источника, так как определяется топологией, выходной мощностью и др. Для иллюстрации принципа работы ШИМ-контроллера иногда будет показан пример с выходной частью.
Рис. 5а. Первая схема – с фиксированным выходным напряжением, вторая – с регулировкой выходного напряжения.
Рис. 5б. Диаграммы выхода ШИМ и выхода компаратора.
Рис. 6. Пример выходного каскада повышающего импульсного источника питания, подключенного к ШИМ контроллеру (см.рис.5).
Конфигурируемые логические ячейки (CLC) на рис .5 можно включить как элемент И. Для предотвращения высокочастотной генерации от компаратора его выход целесообразно пропустить через еще одну CLC – D-триггер с синхронизацией от сигнала ШИМ
В этом случае получим два «бонуса» — отсутствие возникновения высокочастотной генерации и неизменность скважности управляющего ШИМ (см. пояснения на рис
7). Подробнее о конфигурируемых логических ячейках см. в статье «Конфигурируемые логические ячейки в PIC микроконтроллерах» .
Рис.7.а. Укорочение управляющих ШИМ импульсов, возможность появления высокочастотной генерации
Рис. 7.б. Синхронизация сигналов позволяет предотвратить укорочение ШИМ импульсов
Рис. 8. Синхронизация сигналов для предотвращения генерации и укорочения ШИМ.
Ещё о функциях контроллеров ШИМ
Задумав спроектировать контроллер ШИМ своими руками, необходимо как следует продумать все детали его реализации. Только так можно создать работающее устройство. Кроме вышеуказанных выходов, работа ШИМ-контроллера подразумевает наличие следующих функций:
Опорное напряжение (VREF). Фабричные изделия для удобства обычно дополняются функцией выработки стабильного опорного напряжения. Специалисты заводов-изготовителей рекомендуют соединять данный вывод с общим проводом через емкость не менее 1 мкФ для повышения качества и возможности стабилизации опорного напряжения.
- Ограничение тока (ILIM). Если показатели напряжения на данном выводе существенно превышают установленное (как правило, около 1 В), то контроллер автоматически закрывает силовые ключи. В случаях, когда показатель напряжения превышает второе пороговое значение (в пределах 1,5-2 В), устройство тут же обнуляет напряжение на подключении к мягкому старту.
- Мягкий старт (SS). Показатель напряжения на данном выходе определяет максимально допустимую ширину будущих модулируемых импульсов. На данный вывод подает ток установленной величины. Если между ним и всеобщим кабелем вмонтировать дополнительную емкость, то она будет медленно, но уверенно заряжаться, что приведет к постепенному расширению каждого импульса от минимума вплоть до окончательного расчетного значения. Благодаря этому можно обеспечить плавное, а не стремительное нарастание величин тока и напряжения в общей схеме устройства, благодаря чему такая система и заслужила свое название «мягкий старт». При этом, если специально ввести ограничение по напряжению на данном выводе, допустим, подключив делитель напряжения и систему диодов, можно и вовсе ограничить превышение импульсами некоего задаваемого значения ширины.
Импульсный источник питания
Еще один пример использования конфигурируемых логических ячеек совместно со встроенными компараторами.
Таймер TMR периодически устанавливает RS-триггер и открывает силовой транзистор. Ток начинает течь через индуктивность, напряжение на резисторе R1 линейно увеличивается. При достижении напряжения на R1 порогового значения срабатывает компаратор COMP1 и сбрасывает триггер, транзистор закрывается. Ток через индуктивность не может прерваться мгновенно, поэтому ток начинает течь через диод D1 и заряжает выходной конденсатор. По срабатыванию таймера триггер снова устанавливается и процесс повторяется.
Рис.17a. Простейший импульсный источник питания.
На рисунке приведена схема повышающего источника, но для других топологий (см. рис. 17b) работа схемы будет аналогичной, поэтому выходной каскад далее рисовать не буду.
| схема | описание |
|---|---|
| повышающий | |
| понижающий | |
| Sepic |
Рис.17b. Различные топологии импульсных источников питания
Приведенная на рис. 17a схема выполняет функцию преобразования энергии и работает по пиковому значению тока в индуктивности. Можно ввести еще контур регулирования выходного напряжения. Наиболее просто сделать гистерезисное управление: когда напряжение на выходе ниже нормы – происходит накачка источника, когда напряжение выше – выдача управляющих импульсов на силовой транзистор блокируется.
Рис.17c. ИИП с гистерезисным управлением
Включение силового транзистора будет генерировать помеху, которая может приводить к преждевременному срабатыванию компаратора COMP1. Для избавления от этого можно включить RC-фильтр в цепь между R1 и компаратором, а можно добавить рассматриваемый ранее блок бланкирования (формирование импульса по фронту, см. рис 8а, или рис. 14а), который после включения транзистора будет блокировать сброс триггера на короткий интервал времени.
Рис.17d. Помеха при коммутации силового ключа
Рис.17e. ИИП с гистерезисным управлением и бланкированием помехи переключения.
Элементы U1 и U2 можно привести к реализации на элементах ИЛИ и отнести к входу CLC1, тогда вся логическая часть схемы реализуется на трех ячейках CLC (обычно в микроконтроллерах Microchip имеется 4 ячейки).
Все что на схеме изображено левее силового ключа – находится внутри микроконтроллера, связи периферийных модулей так же осуществляются внутри кристалла микроконтроллера. Напряжения порогов Ref и Ref1 могут задаваться встроенными источниками опорного напряжения или ЦАП. Таким образом, импульсный источник питания с регулируемым выходным напряжением можно реализовать на периферийных модулях микроконтроллера. После первоначального конфигурирования схема будет работать полностью аппаратно без необходимости участия ядра в поддержании функции преобразователя. Ядро может заниматься интерфейсными задачами, индикации контроля и др.
Вообще, для построения импульсных источников питания в новых семействах PIC16F17xx микроконтроллеров Microchip есть дополнительные аналоговые (операционные усилители) и специализированные периферийные модули: модули пилообразной компенсации (Slope Compensation) и программируемый рамп-генератор (Programmable Ramp Generator, PRG), операционные усилители, модуль формирования комплементарных выходных сигналов (COG), HLT таймера. Но об этих частях ПНЯ постараемся рассказать в следующий раз.
Периферия независимая от ядра интересна сама по себе, но наибольшую пользу может принести возможность синтеза функциональных блоков, т.е. совместное использование нескольких периферийных модулей для решения конкретных задач. В этом случае тактовая частота, быстродействие и разрядность ядра уходят на второй план – аппаратная часть выполняет специализированные функции, а ядро занимается программной поддержкой работы изделия.
Применяемые на практике виды
- Устройства серии PWM.
- Устройства серии MPPT.
Первый вид контроллера для солнечной батареи можно назвать «старичком». Такие схемы разрабатывались и внедрялись в эксплуатацию ещё на заре становления солнечной и ветряной энергетики.
Принцип работы схемы PWM контроллера основан на алгоритмах широтно-импульсной модуляции. Функциональность таких аппаратов несколько уступает более совершенным устройствам серии MPPT, но в целом работают они тоже вполне эффективно.
Одна из популярных в обществе моделей контроллера заряда АКБ солнечной станции, несмотря на то, что схема устройства выполнена по технологии PWM, которую считают устаревшей
Конструкции, где применяется технология Maximum Power Point Tracking (отслеживание максимальной границы мощности), отличаются современным подходом к схемотехническим решениям, обеспечивают большую функциональность.
Но если сравнивать оба вида контроллера и, тем более, с уклоном в сторону бытовой сферы, MPPT устройства выглядят не в том радужном свете, в котором их традиционно рекламируют.
Контроллер типа MPPT:
- имеет более высокую стоимость;
- обладает сложным алгоритмом настройки;
- даёт выигрыш по мощности только на панелях значительной площади.
Этот вид оборудования больше подходит для систем глобальной солнечной энергетики.
Контроллер, предназначенный под эксплуатацию в составе конструкции солнечной энергетической установки. Является представителем класса аппаратов MPPT – более совершенных и эффективных
Под нужды обычного пользователя из бытовой среды, имеющего, как правило, панели малой площади, выгоднее купить и с тем же эффектом эксплуатировать ШИМ-контроллер (PWM).
Немного теории
Схема отключения при понижении входного напряжения
Рис. Схема отключения при понижении входного напряжения
Схема отключения при понижении входного напряжения или UVLO-схема(по-английски отключение при понижении напряжения – Under-Voltage LockOut) гарантирует, что напряжение Vcc равно напряжению, делающему микросхему UC384x полностью работоспособной для включения выходного каскада. На Рис. показано, что UVLO-схема имеет пороговые напряжения включения и выключения, значения которых равны 16 и 10, соответственно. Гистерезис , равный 6В, предотвращает беспорядочные включения и выключения напряжения во время подачи питания.
Генератор
Рис. Генератор UC3842
Частотозадающий конденсатор Ct заряжается от Vref(5В) через частотозадающий резистор Rt, а разряжается внутренним источником тока.
Микросхемы UC3844 и UС3845 имеют встроенный счетный триггер, который служит для получения максимального рабочего цикла генератора, равного 50%. Поэтому генераторы этих микросхем нужно установить на частоту переключения вдвое выше желаемой. Генераторы микросхем UC3842 и UC3843 устанавливается на желаемую частоту переключения. Максимальная рабочая частота генераторов семейства UC3842/3/4/5 может достигать 500 кГц.
Считывание и ограничение тока
Рис. Организация обратной связи по току
Преобразование ток-напряжение выполнено на внешнем резисторе Rs, связанном с землей. RC фильтр для подавления выбросов выходного ключа. Инвертирующий вход токочувствительного компаратора UC3842 внутренне смещен на 1 Вольт. Ограничение тока происходит, если напряжение на выводе 3 достигает этого порогового значения.
Усилитель сигнала ошибки
Рис. Структурная схема усилителя сигнала ошибки
Неинвертирующий вход сигнала ошибки не имеет отдельного вывода и внутренне смещен на 2,5 вольт. Выход усилителя сигнала ошибки соединен с выводом 1 для подсоединении внешней компенсирующей цепи, позволяя пользователю управлять частотной характеристикой замкнутой петли обратной связи конвертора.
Рис. Схема компенсирующей цепи
Схема компенсирующей цепи, подходящая для стабилизации любой схемы преобразователя с дополнительной обратной связью по току, кроме обратноходовых и повышающих конвертеров, работающих с током катушки индуктивности.
Способы блокировки
Возможны два способа блокировки микросхемы UC3842: повышение напряжения на выводе 3 выше уровня 1 вольт, либо подтягивание напряжения на выводе 1 до уровня не превышающего падения напряжения на двух диодах, относительно потенциала земли. Каждый из этих способов приводит к установке ВЫСОКОГО логического уровня напряжения на выходе ШИМ-копаратора (структурная схема). Поскольку основным (по умолчанию) состоянием ШИМ-фиксатора является состояние сброса, на выходе ШИМ-компаратора будет удерживаться НИЗКИЙ логический уровень до тех пор, пока не изменится состояние на выводах 1 и/или 3 в следующем тактовом периоде (периоде, который следует за рассматриваемым тактовым периодом, когда возникла ситуация, требующая блокировки микросхемы).
Системы управления микросхемами
Важно знать не только из чего состоят микросхемы шим — контроллеров, но и какие существуют виды самих систем. В настоящее время доступно две основных системы широко — импульсной модуляции в которых шим — контроль принимает активное участие
Вот их некоторые особенности:
Цифровая система. В цифровой шим — системе все существующие процессы описываются цифровыми данными. Так на выходе в цифровом формате формируется показатель уровня напряжения. Заметим, что уровень напряжения может быть высокий (измеряется как 100%) и низкий (0%). Однако показатели напряжения, благодаря современным технологиям, можно изменять
Как? Необходимо изменить скважность импульсов. Только тогда изменится и напряжение
Любые совершенные перемены имеют свою частоту. Именно шим — контролёры регулируют описанные процессы. С их помощью вся система будет успешно работать. Эта специальная микросхема по праву называется сердцем всей цифровой системы шим — модуляторов.
А вот получить на выходе нужный сигнал можно как с программным, так и аппаратным методом.
Аппаратный метод. Получение сигнала этим способом происходит с помощью специального таймера, который изначально встроен в цифровую систему. Такой таймер генерирует или способствует включению импульсов на определённых этапах вывода сигнала.
Программный метод. В этом случае получения сигналов происходит посредством выполнения специальных программных команд. У программного способа больше возможностей, нежели у аппаратного. В то же время использования этого метода получения сигналов может занять много памяти.
А что можно сказать о «сердце системы». У шима — контролёра, который активно применяется в цифровых модуляторах есть свои преимущества. Стоит помнить о следующих:
- Низкая стоимость.
- Стабильная работа.
- Высокая надёжность.
- Возможность экономить энергию.
- высокая эффективность преобразования сигналов.
Все перечисленные преимущества делают цифровую систему более востребованной среди потребителей.
Аналоговый модулятор. Принцип работы аналогового модулятора в корне отличается от принципа работы цифрового Вся суть работы такого модулятора состоит в сравнении двух сигналов. Эти сигналы отличаются между собой порядком частоты. Операционный усилитель — это главный элемент аналогового модулятора, который отвечает за сравнение сигналов. Сравнение сигналов осуществляется на выходе. В качестве сравнения усилитель используется два сигнала. Первый — пилообразное напряжение высокой частоты. Второй сигнал — низкочастотное напряжение. После сравнения на свет появляются импульсы прямоугольной формы. Длительность импульсов напрямую зависят от модулирующего сигнала.
Шим — контроллер в импульсных блоках питания
Многие электрические приборы сегодня оснащены специальными блоками питания. Эти блоки помогают преобразить один вид напряжения в другой. В процессе преобразования энергии принимают участия два устройства:
- Импульсный блок питания.
- аналоговые трансформаторные устройства.
В этой статье мы больше внимания обратим на первое устройство, так как именно в нём используется шим — контролёр.
Необходимость
При максимальном заряде аккумулятора, контроллер будет регулировать подачу тока на него, уменьшая ее до необходимой величины компенсации саморазряда устройства. Если же аккумулятор полностью разряжается, то контроллер будет отключать любую входящую нагрузку на устройство.
Необходимость этого устройства можно свести к следующим пунктам:
- Зарядка аккумулятора многостадийная;
- Регулировка включения/отключения аккумулятора при заряде/разряде устройства;
- Подключение аккумулятора при максимальном заряде;
- Подключение зарядки от фотоэлементов в автоматическом режиме.
Контроллер заряда аккумулятора для солнечных устройств важен тем, что выполнение всех его функций в исправном режиме сильно увеличивает срок службы встроенного аккумулятора.
Настройка схемы
Перед началом настройки временно разорвите цепь выхода компаратора U1-2.
Вместо термистора подключите сопротивление 8.2 кОм, примерно равное сопротивлению 10-килоомного термистора при температуре 25 градусов Цельсия. Если вы не планируете использовать термокомпенсацию точки максимальной мощности, или расстояние от панели до контроллера больше 2 метров, резисторы R15, R17 и термистор R16 могут быть удалены без ущерба для работоспособности схемы. При этом резистор R4 подключается к плюсовой шине.
Операции настойки выполняются в следующей последовательности:
- Подключите к выходу контроллера заряженную примерно на 50-60% аккумуляторную батарею небольшой мощности, например 7 А·ч от источника бесперебойного питания. Как правило, такие аккумуляторы есть в арсенале мастера.
- Проверьте наличие опорного напряжения 8 В.
- Подключите к входу контроллера регулируемый источник 10-24 В с током до 2 А через сопротивление 5 Ом, имитируя подключение солнечной батареи.
- Медленно поднимая напряжение, контролируйте состояние выхода компаратора U1-1. Если при напряжении, равном номинальному напряжению панели, например 17.2 В, с которой будет использоваться контроллер, на выходе U1-1 все еще будет высокий потенциал, регулируем R5 до возникновения автоколебаний.
- Далее контролируя напряжение на конденсаторе С1 и увеличивая входное напряжение, убеждаемся, что напряжение на конденсаторе С1 остается неизменным и равным номинальному напряжению солнечной панели. При помощи осциллографа убедитесь, что форма сигнала на стоке Q3 близка к показанной на Рисунке 3.
- Напряжение на аккумуляторе начнет расти. Когда оно достигнет 14.5 В, прекратите настройку, отключите аккумулятор и источник питания. Восстановите соединение выхода компаратора U1-2 с элементами схемы.
- Подключите аккумулятор и источник питания. Если форма импульсов изменилась, и ток заряда резко упал, регулируйте R10 до тех пор, пока изменение ограничения зарядного тока не будет наступать при напряжении на заряжаемом аккумуляторе 14.4 В.
| Рисунок 3. | Форма сигнала на стоке MOSFET Q3. |
На этом настройка может считаться законченной.
Режим КТЦ АКБ
При старте программы включается заряд АБ с током Is. Через 1 сек АБ переключается на разряд с током Ii. Еще через 1 сек АБ снова переключается на заряд. Так продолжается до тех пор, пока напряжение не достигнет Umax – программа останавливается. Индикация КТЦ выкл. Если напряжение стало выше Umax на 0.2 – остановка программы, индикация ERROR. Если ток заряда или разряда превысил установленные на 0.2 – остановка программы, индикация ERROR.
Если истекло время заряда (параметр H) – остановка программы, индикация ERROR в верхней строке. В нижней строке надпись Time out.
Выбранный режим после отключения от сети не запоминается. При включении всегда режим зарядка.
Управление по напряжению с пропорциональным управлением
При управлении по напряжению с пропорциональным управлением рассогласование выходного напряжения должно вносить поправку в скважность управляющих импульсов. Пропорцию между величиной рассогласования и величиной коррекции скважности обеспечивает усилитель ошибки и фильтр петли регулирования
Управление по напряжению с пропорциональным управлением используется сравнительно редко, так как при этом методе управления индуктивность может входить в насыщение при запуске источника и при коротком замыкании на выходе, требуется петлевой фильтр второго порядка и есть влияние входного напряжения на коэффициент усиления усилителя ошибки.
Управление по напряжению с пропорциональным управлением можно реализовать на встроенной периферии PIC контроллеров с помощью ШИМ модулятора – необходим генератор пилы (Ramp генератор) и компаратор (реализацию ШИМ модуляторов мы уже рассматривали в )
Генерируемый микроконтроллером опорный ШИМ служит для формирования пилообразного напряжения и определяет частоту управляющих импульсов, а напряжение обратной связи определяет скважность управляющих импульсов
Для предотвращения насыщения индуктивности при запуске источника или при коротком замыкании на выходе нужно ограничить скважность управляющего сигнала. Для этого выходной сигнал компаратора (CMP1_out) подаем на CLC (элемент И), а на другой вход – опорный ШИМ формирования пилы (сигнал PWM рис
10). Длительность импульса ШИМ будет служить ограничителем скважности управляющего сигнала DRV (ограничивать сигнал с выхода компаратора).
Частота работы устройств, синхронизация
Микросхемы ШИМ-контроллеров могут применяться для различных целей. Чтобы отладить их совместную работу с другими элементами устройства, следует разобраться, как устанавливать те или иные параметры работы контроллера и какие компоненты цепи за это отвечают.
Резистор и емкость, задающие частоту работы всего устройства (RT, CT). Каждый контроллер может работать лишь на определенно заданной частоте. Каждый из импульсов следует лишь с этой частотой. Устройство может менять длительность импульсов, их форму и протяженность, но только не частоту. На практике это означает, что чем меньше протяженность импульса, тем длительнее пауза между ним и следующим. При этом частота следования всегда неизменна. Емкость, подключенная между ножкой CT и общим кабелем, и резистор, подключенный к выходу RT и общему кабелю, в комбинации могут задавать частоту, на которой будет работать контроллер.
- Синхроимпульсы (CLOCK). Весьма распространены случаи, в которых требуется отладить работу нескольких контроллеров так, чтобы выходные сигналы формировались синхронно. Для этого к одному из контроллеров (как правило, ведущему) требуется подключить частотозадающие емкость и резистор. На выходе CLOCK контроллера сразу же появятся короткие импульсы, соответствующие напряжению, которые подаются на аналогичные выходы всей группы устройств. Их принято называть ведомыми. Выводы RT таких контроллеров следует объединить с ножками VREF, а CT — с общим кабелем.
- Напряжение сравнения (RAMP). На этот вывод следует подавать сигнал пилообразной формы (напряжение). При возникновении синхроимпульса на выходе устройства образуется открывающее контрольное напряжение. После того как показатель напряжения на RAMP становится больше в несколько раз, чем величина выходного напряжения на усилителе ошибки, на выходе можно наблюдать импульсы, отвечающие закрывающему напряжению. Длительность импульса может рассчитывать от момента возникновения синхроимпульса вплоть до момента многократного превышения показателя напряжения на RAMP над величиной выходного напряжения усилителя ошибки.
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T. D = t/T. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения
S = T/t.
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Популярные бренды
В бюджетных моделях проценты указываются приблизительно. Это относится к моделям бренда EPSolar. Производители от Morningstar совсем отказались от SOC и выдают информацию пользователю о напряжении АКБ в вольтах. Более достоверными считаются показания процентов у таких торговых марок:
- Steca PR1010-3030;
- Tarom;
- Power Tarom.
Китайские производители EPSolar являются наиболее востребованными на рынке данной электроники. Их продукция является оптимальной по соотношению стоимости и качеству, при этом в арсенале имеются модели, впитавшие максимальное количество функционала. Высокое качество комплектующих и сборки выгодно отличает бренд от конкурентов типа Steca Solar. Имеются модели с таймерами для выключения/включения разных ночников.
EPsolar LS2024B PWM Контроллер заряда 20А, 12/24В
Более дорогим является немецкий бренд Steca. Европейское качество привязано к стоимости валюты, поэтому не все могут выбрать такие модели.
Steca Solar PR
https://www.youtube.com/watch?v=igS7mn50x2Q
Принцип шим-регулятора
Работа ШИМ регулятора сложностью не отличается. ШИМ-регулятор — устройство, выполняющее такую же функцию, что и традиционный линейный регулятор мощности (то есть, меняет напряжение или ток за счёт силового транзистора, рассеивающего значительную мощность на себе). Но ШИМ-регулятор отличается намного большим КПД. Достигается это благодаря тому, что управляющий силовой транзистор функционирует в ключевом режиме (либо включен, тогда пропускает большой ток, но мало падение напряжения, либо выключен — ток не проходит). В результате на таких силовых транзисторах мощность практически не рассеивается и энергия впустую не тратится.
После силового транзистора напряжение выходит как прямоугольные импульсы с изменяющейся скважностью в зависимости от необходимой мощности. Но сигнал нужно демодулировать (то есть, выделить среднее напряжение)
Этот процесс происходит или в самой нагрузке (когда она индуктивного характера) или если между нагрузкой и силовым каскадом располагают фильтр нижних частот.
Пример использования шим регулятора
Самый простой пример использования регулятора напряжения ШИМ — ШИМ микросхема NE555, с которой знаком каждый радио-любитель. Благодаря ее универсальности можно конструировать самые разнообразные детали: от простейшего одновибратора импульсов с 2 в обвязке до модулятора, состоящего из большого числа компонентов. ШИМ регулятор напряжения имеет широкую область применения — это схемы регулировки яркости светодиодов и лент, а также регулировка скорости вращения движков.
Проверка на материнской плате
Итак, при включении питания платы, срабатывает защита. В первую очередь, необходимо проверить мультиметром сопротивление плеч стабилизатора.
Для этих целей также может быть использован тестер радиодеталей. Если одно из них показывает короткое замыкание, то есть, измеренное сопротивление составляет меньше 1 Ома, значит, пробит один из ключевых полевых транзисторов.

Выявление пробитого транзистора в случае, если стабилизатор однофазный, не составляет труда – неисправный прибор при проверке мультиметром показывает короткое замыкание. Если схема стабилизатора многофазная, а именно так питается процессор, имеет место параллельное включение транзисторов. В этом случае, определить поврежденный прибор можно двумя путями:
-
произвести демонтаж транзистора и проверить мультиметром сопротивление между его выводами на предмет пробоя;
- не выпаивая транзисторы, замерить и сравнить сопротивление между затвором и истоком в каждой из фаз преобразователя. Поврежденный участок определяется по более низкому значению сопротивления.
Второй способ работает не во всех случаях. Если пробитый элемент определить не удалось, придется все же выпаять транзистор.
Далее производится замена поврежденного транзистора, а также, установка на место всех выпаянных в процессе диагностики радиоэлементов. После этого можно попытаться запустить плату.
Первое включение после ремонта лучше выполнить, сняв процессор и выставив соответствующие перемычки. Если первый запуск был успешным, можно проводить тест с нагрузкой, контролируя температуру мосфетов.
Неисправности ШИМ контроллера могут проявляться так же, как и пробой мосфетов, то есть уходом блока питания в защиту. При этом проверка самих транзисторов на пробой результата не дает.
Кроме этого, следствием нарушения функций ШИМ контроллера может быть отсутствие выходного напряжения или его несоответствие номинальной величине. Для проверки ШИМ контроллера следует вначале изучить его даташит. Наличие высокочастотного напряжения в импульсном режиме, при отсутствии осциллографа, можно определить, используя тестер кварцев на микроконтроллере.
Назначение выводов микросхемы.
Давайте теперь кратко рассмотрим назначение выводов и работу микросхемы (её блоков), а потом посмотрим это практически;
1. CMP — выход усилителя ошибки. Служит для коррекции АЧХ усилителя ошибки, с этой целью между выводами 1 и 2 обычно подключается конденсатор емкостью около 100 пФ. С помощью этого вывода, можно установить коэффициент усиления усилителя ошибки с помощью дополнительного резистора, который подключается к этим же выводам, что и конденсатор, а так же ещё и управлять работой контроллера.
Если на этом выводе уменьшить напряжение ниже 1-го вольта, то на выходе микросхемы (вывод 6) будет уменьшаться длительность импульсов, уменьшая при этом выходное напряжение (мощность) БП.
2. VFB — вход обратной связи усилителя ошибки. Используется в основном для регулировки (стабилизации) выходного напряжения
Если напряжение на этом выводе превысит 2,5 вольта (подаётся с внутреннего источника на не инвертирующий вход усилителя ошибки), то длительность (скважность) выходных импульсов начнёт уменьшаться, уменьшая тем самым выходное напряжение БП
3. IS — сигнал обратной связи по току. Этот вывод обычно присоединен к резистору в цепи истока ключевого транзистора. В момент перегрузки МОП транзистора, напряжение на резисторе увеличивается и при увеличении его более 1-го вольта, импульсы на выходе 6 прекращаются и выходной транзистор закрывается.
4. RC — это вход генератора пилообразного напряжения и сюда подключается задающая RC- цепочка, для установки частоты внутреннего генератора.
Резистор от этого вывода подключается к выводу 8 — это вывод опорного напряжения 5 вольт, а конденсатор к общему проводу.
В основном на практике частота задающего генератора выбирается в диапазоне 35…85 кГц, и в RC-цепочке не рекомендуется использовать керамические конденсаторы.
Частота генератора рассчитывается по следующей формуле; — 1,72/R(кОм) * С(мкФ).
5. GND — общий вывод для первичной цепи. Этот вывод не должен быть напрямую соединён с общим выводом вторичных цепей схемы.
6. OUT — выход ШИМ–контроллера, подключается к затвору ключевому транзистору через резистор или параллельно соединенные резистор и диод (анодом к затвору).
7. VCC — вход питания ШИМ-контроллера, на этот вывод микросхемы подаётся напряжение питания в диапазоне от 16 вольт до 34. Более 34 вольт на микросхему подавать не рекомендуется, так как микросхема обладает защитой от перенапряжения, и если напряжение питания на ней превысит 34 вольта — микросхема отключится.
8. REF — выход внутреннего источника стабильного опорного напряжения 5 вольт, ток его нагрузки может достигать 50 мА.
Похожие записи:
 Классы защиты от поражения электрическим током по гост
Классы защиты от поражения электрическим током по гост
 Как подключить аналоговую камеру видеонаблюдения к компьютеру?
Как подключить аналоговую камеру видеонаблюдения к компьютеру?
 Реле контроля фаз и напряжения
Реле контроля фаз и напряжения
 Фототранзистор: схема, принцип работы и характеристики
Фототранзистор: схема, принцип работы и характеристики
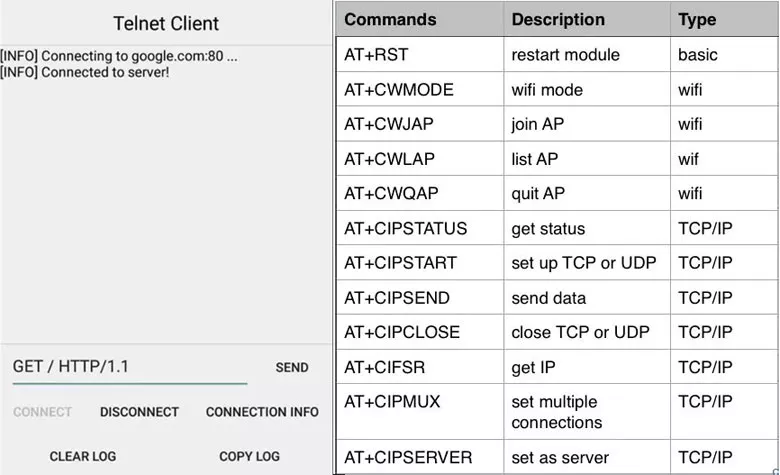 Используем arduino uno с wifi на одной плате для post запроса на сервер
Используем arduino uno с wifi на одной плате для post запроса на сервер
 Выполнение схемы электрической принципиальной и перечня элементов к ней
Выполнение схемы электрической принципиальной и перечня элементов к ней