С/С++
Язык программирования С/С++, относится к языкам более высокого уровня, по сравнению с Ассемблером. Программа на этом языке лучше понятна человеку. Достоинством С/С++ является огромное число программных средств и библиотек, позволяющих просто создавать необходимый код. Фактически, С/С++ сегодня стал основным языком разработки управляющих программ. Компиляторы данного языка реализованы практически для всех моделей микроконтроллеров. Стандартный язык дает возможность переноса программ с одной платформы на другую. Теоретически, используя разные компиляторы, можно преобразовать любую программу в команды микроконтроллера нужного типа. На практике дополнительно требуется учитывать архитектуру микроконтроллера каждого типа. Язык С/С++ имеет достаточно сложную для изучения структуру. Получаемый программный код конкретной задачи, имеет больший объем, чем код той же задачи, реализованной на Ассемблере. Тем не менее язык С/С++ следует признать единственным правильным выбором для профессионального программирования микроконтроллеров.
// Пример программы на языке С // Мигание встроенным светодиодом Arduinovoid setup() { pinMode(13, OUTPUT); // Инициализация выхода 13}void loop() { digitalWrite(13, HIGH); // Зажечь светодиод delay(1000); // Задержка digitalWrite(13, LOW); // Зажечь светодиод delay(1000); // Задержка}
Основные критерии выбора
Для того чтобы выбрать микроконтроллер составим список нужных нам критериев:
Стоимость микроконтроллера должна быть низкой
Он должен быть простым в использовании и хорошо поддерживаться
Важно наличие доступной документации
Он должен программироваться в графической среде
Он должен быть популярен и иметь активное сообщество пользователей
Так как наш робот будет использовать два двигателя и различные датчики, то микроконтроллеру понадобится как минимум два порта для управления двигателями и несколько портов для подключения датчиков. Также должна быть возможность для расширения количества подключаемых устройств в будущем.. микроконтроллер Lego Mindstorms EV3
микроконтроллер Lego Mindstorms EV3
Этим критериям соответствует модуль EV3 из набора Lego Mindstorms EV3.
Основные узлы микроконтроллера
Микроконтроллер состоит из центрального процессора (ЦП, CPU), энергонезависимой памяти, энергозависимой памяти, периферийных устройств и вспомогательных цепей.
Центральный процессор (CPU)
Центральный процессор выполняет арифметические операции, управляет потоком данных и генерирует управляющие сигналы в соответствии с последовательностью инструкции, созданных программистом. Эта чрезвычайно сложная схема, необходимая для функциональности процессора, разработчику не видна. Фактически, благодаря интегрированным средам разработки и языкам высокого уровня, таким как C, написание кода для микроконтроллеров часто является довольно простой задачей.
Память
Энергонезависимая память используется для хранения программы микроконтроллера, то есть (часто очень длинного) списка инструкций машинного языка, которые точно указывают процессору, что делать. Обычно вместо «энергонезависимой памяти» вы будете видеть слово «flash» («флеш»), которое относится к определенному типу энергонезависимого хранилища данных.
Энергозависимая память (то есть ОЗУ, RAM) используется для временного хранения данных. Эти данные теряются, когда микроконтроллер теряет питание. Внутренние регистры также обеспечивают временное хранение данных, но мы не рассматриваем их как отдельный функциональный блок, поскольку они интегрированы в центральный процессор.
Периферийные устройства
Мы используем слово «периферия» для описания аппаратных модулей, которые помогают микроконтроллеру взаимодействовать с внешней системой. Следующие пункты описывают различные категории периферийных устройств и приводят их примеры.
-
Преобразователи данных: аналого-цифровой преобразователь, цифро-аналоговый преобразователь, генератор опорного напряжения.
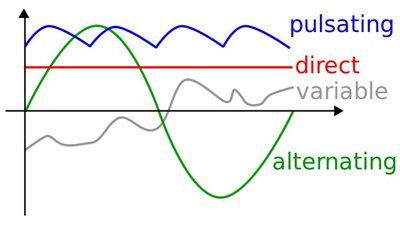
Данный график демонстрирует данные трехосевого акселерометра, оцифрованные с помощью встроенного АЦП микроконтроллера
- Генерирование тактовых сигналов: внутренний генератор, схема на кварцевом резонаторе, петля фазовой автоподстройки частоты.
- Расчет времени: таймер общего назначения, часы реального времени, счетчик внешних событий, широтно-импульсная модуляция.
- Обработка аналоговых сигналов: операционный усилитель, аналоговый компаратор.
- Ввод/вывод: цифровые входные и выходные цепи общего назначения, параллельный интерфейс памяти.
- Последовательная связь: UART, SPI, I2C, USB
Вспомогательные цепи
Микроконтроллеры включают в себя множество функциональных блоков, которые не могут быть классифицированы как периферийные устройства, поскольку их основная цель не состоит в управлении, мониторинге или обмене данными с внешними устройствами. Тем не менее, они очень важны – они поддерживают внутреннюю работу устройства, упрощают реализацию и улучшают процесс разработки.
- Схема отладки позволяет разработчику тщательно контролировать микроконтроллер во время выполнения инструкций. Это важный, а иногда и необходимый метод отслеживания ошибок и оптимизации производительности прошивки.
-
Прерывания являются чрезвычайно ценным видом работы микроконтроллера. Прерывания генерируются внешними или внутренними аппаратными событиями и заставляют процессор немедленно реагировать на эти события, выполняя определенную группу инструкций.
Программы микроконтроллера, написанные на C, организованы в функции. Прерывание заставляет выполнение программы «переходить» в процедуру обработки прерывания (ISR), и после того, как ISR завершил выполнение своих задач, процессор возвращается к функции, которая выполнялась, когда произошло прерывание. - Модуль генерирования тактового сигнала можно считать периферийным устройством, если он предназначен для генерирования сигналов, которые будут использоваться вне микросхемы. Но во многих случаях основная цель внутреннего генератора микроконтроллера состоит в том, чтобы предоставить тактовый сигнал для центрального процессора и периферийных устройств. Внутренние генераторы часто имеют низкую точность, но в приложениях, которые могут допускать эту низкую точность, они являются удобным и эффективными способом упростить конструкцию и сэкономить место на плате.
- Микроконтроллеры могут включать в себя различные типы схем электропитания. Интегрированные стабилизаторы напряжения позволяют в самой микросхеме генерировать необходимое напряжение питания, модули управления питанием могут использоваться для значительного снижения потребления тока устройством в неактивных состояниях, а модули супервизора могут переводить процессор в состояние сброса, когда напряжение питания недостаточно высоко, чтобы обеспечить надежную работу.
Знания
От пустых слов перейдём к реальным требованиям. «MustKnow» в программировании микроконтроллеров — язык C/C++. Да, мировые тенденции сейчас указывают на переход на более совершенные или хотя бы простые языки (вспомните Arduino или D). Но это будущее довольно отдалённое, закладывать путь в него можно разве что сегодняшним школьникам младших классов.
Кроме того, будет очень полезным знание ассемблера. Это необходимо для пошагового отслеживания исполнения кода, чтобы избежать плавающих ошибок и неоправданных потерь в быстродействии.
В остальном довольно общая компьютерная наука: протоколы передачи, простейшее знание электроники и схемотехники (хотя бы принципы работы АЦП/ЦАП, работать с ключами, питанием и пр.), умение читать (и понимать) техническую документацию на английском языке. Но главное — не работать по принципу “научного тыка”, в противном случае ваши микроконтроллеры рискуют превратиться в “камни”.
Еще один совет: постигать все эти знания необходимо на практике. Начать можно с дешёвых, но эффективных готовых плат со всей необходимой обвязкой, вроде Arduino или Raspberry Pi, которые в будущем наверняка станут для вас хорошими помощниками. А уже потом, если возникнет желание, поиграть с периферией.
Общие принципы построения многоядерных микроконтроллеров
Микроконтроллеры объединяют в одной микросхеме функции процессора, памяти и периферийных устройств. Если смотреть с точки зрения программирования и не сильно погружаться в детали, то многоядерный микроконтроллер – это несколько независимых процессоров, которые делят между собой общую память и периферийные блоки. В большинстве случаев для каждого из ядер пишется отдельная прошивка в отдельном проекте среды разработки. Прошивки для разных ядер можно сделать практически полностью независимыми друг от друга. Однако нужно иметь в виду, что содержимое памяти и настройки периферийных блоков могут изменяться из прошивок других ядер.
Если спуститься на уровень ниже, то можно разделить многоядерные микроконтроллеры на простые и сложные. Устройство простых микроконтроллеров (например, LPC55S6x или Cypress CY8C6xx5) практически полностью отвечает описанным выше представлениям. Память и периферийные блоки расположены на определённых шинах. Все шины сведены в единую матрицу (bus matrix). Матрица шин позволяет соединить шины ядра с теми шинами памяти и шинами периферии, по которым в данный момент требуется передать данные. В целом всё аналогично одноядерным микроконтроллерам, с той лишь разницей, что вместо одного ядра к матрице шин подключено несколько ядер.
Но есть более сложные микроконтроллеры, такие как STM32H747. В таких контроллерах может быть несколько матриц шин, причём с разной разрядностью. Те или иные области памяти, а также периферийные блоки могут быть оптимизированы для работы с конкретными ядрами. Поэтому при работе с такими микроконтроллерами нужно более детально изучать их внутреннее устройство и учитывать дополнительные ограничения.
Совместная отладка
У нас получилось запустить прошивки для разных ядер. Но современные среды разработки позволяют осуществлять отладку при одновременном запуске прошивок на двух ядрах. В некоторых случаях одновременная отладка двух ядер может оказаться полезной.
Чтобы воспользоваться таким режимом отладки, нужно сделать несколько дополнительных настроек:
- Перейти в проект ведомого ядра (ядро 1).
- Включить сохранение бинарного файла прошивки. Для этого нужно перейти во вкладку Converter > Output, поставить галочку Generate Additional Output и выбрать формат Raw binary.
- Во вкладке Debugger > Download снять галочку Verify Download. При совместной отладке двух ядер эта проверка работает некорректно и мешает запуску.
- Сохранить настройки и собрать проект.
- Перейти в проект ведущего ядра (ядро 0).
- В свойствах проекта перейти во вкладку Debugger > Multicore, выбирать вариант Simple и указать необходимые параметры проекта ведомого ядра.
- Перейти во вкладку Linker > Input и подключить к проекту файл прошивки ведомого ядра. Для этого нужно задать имя символа (задаётся произвольным образом). В данном примере задано имя , привязать к этому символу бинарный файл, который был получен в результате сборки проекта для ядра 1, указать секцию и выравнивание .
- Теперь можно сохранить настройки и запустить отладку. Если всё настроено правильно, при запуске отладки из проекта ведущего ядра должен открыться второй экземпляр среды разработки с проектом для ведомого ядра. Всё это занимает достаточно много места на экране, поэтому второй монитор может оказаться очень кстати.
В режиме совместной отладки в IAR появляется специальная панель, которая позволяет управлять отладкой сразу нескольких ядер.
Популярные ошибки
Если возникает ошибка , скорее всего проект ведомого ядра не скомпилирован. Нужно сначала собрать проект для CPU1 и только после этого запустить отладку проекта для CPU0.
Если при запуске отладки Вы получили ошибку
скорее всего, Вы забыли снять галочку Verify download на шаге 3. Нужно проверить, что она снята, пересобрать проект ведомого ядра и попробовать запустить совместную отладку снова.
Если отладка работает странно: некорректно работают условные переходы, не происходит вызовов функций, не работают точки останова, возможно, используемая отладочная информация не соответствует исполняемому коду. Первым делом нужно пересобрать проект ведомого ядра. Также нужно проверить настройки, сделанные на шагах 6 и 7. Если они не согласованы друг с другом (в настройках компоновщика указан бинарный файл одного проекта, а в настройках отладчика указан другой проект), явных ошибок при запуске может не возникнуть, отладка будет работать, но поведение будет некорректным. Нужно проверить соответствие бинарного файла в настройках компоновщика проекту, указанному в настройках отладчика.
Стартовый набор начинающего микроконтроллерщика
Для начала я бы разделил начинающих микроконтроллерщиков на три условные группы:
— радиолюбители, желающие собирать готовые решения на микроконтроллерах, но не имеющие желания изучать программирование
— желающие освоить программирование и собирать конструкции на микроконтроллерах, но выбравшие наиболее простой путь — Arduino
— желающие полностью разобраться в устройстве и программирование микроконтроллеров и собирать свои собственные конструкции
Для первой группы все очень просто:
— приобрести программатор и научиться с ним работать
Для второй группы остановлюсь немного подробнее.
Arduino ориентирована на начинающих, непрофессиональных пользователей, и состоит из двух частей — программной и аппаратной.
Программная часть состоит из бесплатной программной оболочки для написания программ, их компиляции и программирования устройства.
Язык программирования — стандартный С++ с некоторыми изменениями облегчающими работу с этим языком (хотя есть возможность создавать программы или подключать готовые файлы проектов используя стандартный язык С++). Научиться программировать в Arduino очень просто (поэтому программы на Arduino называются «наброски») — весь процесс программирования сводится в основном к выбору необходимых готовых библиотек для получения конкретного результата.
Аппаратная часть состоит из готовой платы с микроконтроллером с необходимой обвязкой для нормальной работы микроконтроллера и плат расширения (шилды). Кроме того выпускается множество готовых датчиков и исполнительных устройств. Весь процесс сборки конструкции на Arduino напоминает конструктор «Лего» — выбираете необходимые платы расширения и устройства и стыкуете их с основной платой. Для загрузки программы отдельный программатор не требуется.
Arduino вещь конечно хорошая, но предназначена в основном только для тех, кто хочет собирать конструкции на микроконтроллерах, но не хочет загружать свои мозги лишними (по их мнению) знаниями (это сугубо мое мнение).
Ну а мы причисляем себя к третьей группе и пойдем хотя и тернистым, но очень интересным путем.
А теперь к главному:
1. Для практических опытов нам потребуется микроконтроллер (а лучше три):
— наиболее популярные и востребованные микроконтроллеры — ATmega8A-PU и ATtiny2313A-PU, ATtiny13A— PU. Кстати, ATtiny13 очень популярный МК, и не зря его называют «малюткой» — малые возможности — но серьезные разработки.
2. Для записи программы в микроконтроллер необходим программатор:
— идеальное решение, на мой взгляд, — программатор USBASP, от которого мы к тому-же будем получать напряжение 5 Вольт для будущих конструкций.
3. Для визуальной оценки и выводов результатов работы программы необходимы средства отображения информации:
— светодиоды
— семисегментный светодиодный индикатор
— знакосинтезирующий (буквенно-цифровой) LCD дисплей
4. Для изучения процессов общения микроконтроллера с другими устройствами:
— цифровой датчик температуры DS18B20 и часы реального времени DS1307 (очень практичные устройства)
5. Кроме того нам потребуются транзисторы, резисторы, кварцевые резонаторы, конденсаторы, кнопки:
— биполярные транзисторы структуры NPN и PNP
— набор резисторов различного номинала
— кварцы (вот тут я выкинул лишнее) на 32,768 кГц, 8 МГц.
— керамические конденсаторы на 22 pF
— тактовые кнопки
6. Для сборки конструкций на микроконтроллере понадобится макетная плата для монтажа без пайки и набор перемычек к ней:
— макетная плата МВ102 (идеально иметь две такие платы — они стыкуются между собой, что очень пригодится в дальнейшем)
— соединительные перемычки к макетной плате трех типов — гибкие (мама-мама, папа-папа) и жесткие П-образной формы
Получается вот такой набор:
В дальнейшем, часть из этого набора — макетная плата и перемычки к ней, программатор всегда будут нужны для проектирования и тестирования ваших конструкций, а остальная часть может быть применена в этих конструкциях.
С материальной базой разобрались, переходим ко второму вопросу.
Общие сведения о языке C (Си)
В настоящие дни C (Си) является многофункциональным языком программирования высокого уровня, подобным таким языкам как Pascal или Python, но в отличие от них он имеет возможность работы с командами низкого уровня, подобно языку ассемблера. Программу на языке С можно скомпилировать в машинный код практически для любого известного микропроцессора. Не исключением стали и микроконтроллеры – сейчас по популярности использования (особенно для начинающих) язык Си обогнал в них доминировавший до этого язык ассемблера. Программирование на языке С поддерживает и самая популярная в настоящее время программная платформа Atmel Studio (!!!!!!) для микроконтроллеров семейства AVR.
Сейчас уже можно с уверенностью сказать, что язык С стал своеобразным фундаментом, на котором строится все современное программирование – чего стоят хотя бы «Visual C» и «C Sharp». Основанные на нем языки программирования сейчас занимают доминирующее положение в мире программирования. А все началось с удачной структуры языка, разработанной в 1972 г. Деннисом Ритчи.
Файлы программ на языке Си имеют расширение .C, а простейшая структура программы выглядит следующим образом.
#include <avr/io.h> /* заголовок */
int main(void) /* главная функция: начало программы */
{ /* открывающая скобка в начале программы */
оператор программы;оператор программы;…оператор программы;
} /* закрывающая скобка в конце программы */
Комментарии являются необязательным элементом программы, но они крайне желательны для лучшего понимания ее сути.
Ассемблер
Ассемблер является языком самого низкого уровня. При этом он позволяет наиболее полно раскрыть все возможности микроконтроллеров и получить максимальное быстродействие и компактный код. В некоторых случаях альтернативы ассемблеру нет, но тем не менее он имеет множество недостатков. Несмотря на получаемую компактность машинного кода, программа, написанная на языке Ассемблер, громоздка и труднопонимаема. Для ее создания требуется отличное знание архитектуры и системы команд микроконтроллеров.Ассемблер отлично подходит для программирования микроконтроллеров, имеющих ограниченные ресурсы, например 8-ми битных моделей с малым объемом памяти. Для больших программ и тем более 32-разрядных контроллеров, лучше использовать другие языки, отличающиеся более высоким уровнем. Это позволит создавать более сложные и при этом понятные программы.
Асимметричность ядер
Схемы построения многоядерных микроконтроллеров можно поделить на симметричные и асимметричные.
Симметричная схема предполагает одновременный запуск ядер. Каждое ядро загружается и начинает выполнять свою программу независимо от остальных ядер. Синхронизация ядер с помощью аппаратных и программных механизмов возможна. Но она не является обязательной.
Если схема асимметричная, то одно из ядер является ведущим (Master Core). Ведущее ядро запускается первым. Тактирование остальных ядер, являющихся ведомыми (Slave Core), в этот момент выключено, а сами ядра удерживаются в состоянии reset. Чтобы привести их в действие ведущее ядро должно включить подачу тактового сигнала и запустить сами ядра. Делается это по аналогии с настройкой тактирования периферийных блоков изменением соответствующих регистров блока System Control (в зависимости от производителя название может отличаться).
Обычно тактирование ядер как в ассиметричной, так и в симметричной схемах осуществляется независимо. Разные ядра могут работать на разных частотах. В процессе работы отдельные ядра могут переходить в спящий режим для экономии энергии.
Стоит отметить, что сами ядра могут быть разными, в частности могут относиться к разным семействам. Часто в одном устройстве располагают простые ядра, обеспечивающие высокую энергоэффективность (Cortex M0), и более продвинутые ядра, предназначенные для сложных вычислений (Cortex M4 / M7).
Создание прошивки для ядра 0
Прошивки для двух ядер можно писать и отлаживать независимо. Сначала напишем прошивку для ядра CPU0.
На данном этапе порядок создания и настройки проекта стандартный.
Создать новый проект для языка C: Project > Create New Project. Выбрать C / main. В названии проекта имеет смысл подчеркнуть, что он относится к ядру 0, поскольку для второго ядра будет создан другой проект. Я назвал проект CPU0.
Сохранить рабочее пространство: File > Save Workspace.
В свойствах проекта во вкладке General Options > Target указать микроконтроллер.
Здесь появляется первая особенность: из списка устройств нужно выбрать не только микроконтроллер, но и ядро, которое будет использоваться в данном проекте.
Во вкладке General Options > Library Configuration поставить галочку Use CMSIS.
В настройках компилятора (C/C++ Compiler > Preprocessor) указать путь до заголовочного файла с макроопределениями для используемого семейства микроконтроллеров: . Здесь же в поле Defined symbols прописать (нужно для того, чтобы подключились правильные заголовочные файлы).
Во вкладке Linker > Config поставить галочку Override default и указать путь до конфигурационного файла компоновщика из SDK (находится в папке ).
Во вкладке Debugger > Setup в качестве отладчика (Driver) установить CMSIS DAP
Проверить, что во вкладке Debugger > Download стоят галочки Verify Download и Use flash loader(s).
Добавить в проект файлы и (можно найти в папках и соответственно)
Важно обратить внимание, что для разных ядер эти файлы будут разными.
Добавить код для мигания светодиодом, подключенным к ножке .
Скомпилировать, запустить, проверить, что всё работает
История создания языка C (Си)
Язык программирования C (Си) появился «стихийно» – ни одна компания не заказывала создания подобного языка. Его первая версия появилась на свет в 1972 г. в фирме Bell Laboratories, написал ее теперь уже всемирно известный программист Деннис Ритчи (Dennis MacAlistair Ritchie).
Ритчи рассчитывал, что созданный им язык программирования будет востребован в операционной системе UNIX, которая тогда была еще новинкой. Конечно, создавать новый язык Ритчи помогали и другие его коллеги программисты, но именно он внес наибольший вклад в становление этого языка. К новому языку первоначально не выдвигалось никаких требований, перед ним не ставилось никаких задач, фактически он возник как результат дружеского соревнования между небольшим кругом программистов.
Название C (Си) появилось так же стихийно, как и сам язык. Фактически, он стал преемником ранее созданного языка В (Би), разработанного автором операционной системы UNIX Кеном Томпсоном. В свою очередь, язык Би во многом был похож на языке BCPL, разработанный в Кембриджском университете. А язык BCPL основывался на идеях «старого как мир» Алгола-60.
Первым неформальным стандартом языка Си стало издание в 1978 г. книги Брайана Кернигана и Денниса Ритчи с названием «The ‘C’ Programming Language». Первоначально книга была издана в США, но потом была переведена и многократно переиздавалась во многих других странах мира. В 1989 г. язык Си был стандартизован ANSI (American National Standards Institute – американский национальный институт стандартов) и ISO (International Standard Organization — международная организация по стандартизации).
Но время шло и у пользователей языка Си появилась потребность в реализации новых функций, не поддерживавшихся языком. Учитывая все это, Бьерн Страуструп в начале 80-х (работавший все в той же самой Bell Laboratories) принял решение о расширении возможностей языка Си, который первоначально назвали как «Си с классами». Но в дальнейшем за его модификацией языка закрепилось другое название — Си++. Это название сохранилось за ним вплоть до настоящего времени.

Система прерываний
Каждое ядро имеет собственный контроллер прерываний (NVIC). Поэтому все внутренние прерывания ядер настраиваются и работают полностью независимо. Что же касается запросов на прерывания, которые поступают из периферийных блоков, то они идут по общим линиям, которые параллельно подключены к блокам NVIC. Каждый периферийный блок может генерировать только один сигнал, который получат блоки NVIC сразу всех ядер. Для каждого ядра можно независимо настроить вектора, которые должны обрабатываться: назначить обработчики, задать приоритеты, включить/выключить обработку. Но настроить периферийные блоки так, чтобы они отправляли разные запросы разным ядрам, не получится. Например, не получится настроить блок GPIO так, чтобы по нарастающему фронту срабатывал обработчик в одном ядре, а по спадающему фронту на той же ножке запускался обработчик в другом ядре, поскольку эти события практически во всех микроконтроллерах используют одну общую линию.
Как выбрать микроконтроллер правильно?
Если вы изучаете робототехнику, то вам понадобится микроконтроллер для любого робототехнического проекта. Для новичка, выбор правильного микроконтроллера может показаться сложной задачей. Особенно учитывая ассортимент, технические характеристики и области применения. Есть много различных микроконтроллеров доступны на рынке:
- Ардуино
- BasicATOM
- BasicX
- Lego EV3
- и многие другие
Для того чтобы правильно выбрать микроконтроллер задайте себе следующие вопросы:
Какой микроконтроллер самый популярный для моего приложения?
Конечно, создание роботов и электронных проектов в целом-это не конкурс популярности. Очень хорошо если микроконтроллер имеет большую поддержку сообщества. И успешно используется в похожих или даже одинаковых ситуациях. В результате это может значительно упростить этап проектирования. Таким образом, вы могли бы извлечь пользу из опыта других пользователей, как среди любителей, так и среди профессионалов.
Участники сообществ конструкторов роботов делятся друг с другом результатами, кодами, картинками, видео, и подробно рассказывают об успехах и даже неудачах. Все это является доступными материалами и возможностью получать советы от более опытных пользователей. Следовательно, может оказаться очень ценным.
Есть какие-то особенные требования у вашего робота?
Микроконтроллер должен быть способен выполнять все специальные действия вашего робота, чтобы функции исполнялись правильно. Некоторые особенности являются общими для всех микроконтроллеров (например, наличие цифровых входов и выходов, возможность выполнять простые математические действия, сравнение значений и принятие решений).
Возможно другим контроллерам требуется специфическое оборудование (например, АЦП, ШИМ, и коммуникационный протокол поддержки)
Также требования к памяти и скорости, а также число выводов должны быть приняты во внимание
Какие компоненты доступны для конкретного микроконтроллера?
Может быть ваш робот имеет специальные требования или необходим конкретный датчик или компонент. И это имеет решающее значение для вашего проекта. Следовательно выбор совместимого микроконтроллера, безусловно, очень важен.
Большинство датчиков и компонентов может взаимодействовать напрямую со многими микроконтроллерами. Хотя некоторые комплектующие предназначены для взаимодействия с конкретным микроконтроллером. Возможно они будут уникальными и несовместимыми другими типами микроконтроллеров.
Что нас ждет в будущем?
Цена на компьютеры резко идет вниз, и достижения в области технологии делают их меньше и эффективнее. В результате одноплатные компьютеры стали привлекательным вариантом для роботов. Они могут работать с полноценной операционной системой (Windows и Linux являются наиболее распространенными).
Дополнительно компьютеры могут подключаться к внешним устройствам, таким как USB-устройства, жидкокристаллические дисплеи и т. д. В отличие от своих предков, эти одноплатные компьютеры, как правило, значительно меньше потребляют электроэнергии.
Общие сведения о портах микроконтроллеров AVR
Порты микроконтроллеров AVR — это устройства ввода/вывода, позволяющие микроконтроллеру передавать или принимать данные. Стандартный порт микроконтроллера AVR содержит восемь разрядов данных, которые могут передаваться или приниматься параллельно. Ножки микроконтроллера также называют пинами, контактами или выводами. Порты обозначаются латинскими буквами А, В, С и т.д. Количество портов зависит от конкретной модели микроконтроллера.
Kонфигурирование каждой линии порта (задание направления передачи данных) может быть произведено программно в любой момент времени. Входные буферы портов построены по схеме триггера Шмитта. Для линий, сконфигурированных как входные, также имеется возможность подключения внутреннего подтягивающего резистора сопротивлением 35…120 кОм между входом и проводом питания. Kроме того, если вывод (вход) с подключенным внутренним подтягивающим резистором подключить к общему проводу, он может служить источником тока.
Обращение к портам производится через регистры ввода/вывода, причем под каждый порт в адресном пространстве ввода/вывода за-резервировано по 3 адреса. По этим адресам размещаются три регистра: регистр данных порта PORTx, регистр направления данных DDRx и регистр выводов порта PINx. Разряды этих регистров имеют названия: Px7…Px0 — для регистров PORTx, DDx7…DDx0 — для регистров DDRx и PINx7…PINx0 — для регистров PINx.
Действительные названия регистров (и их разрядов) получаются подстановкой названия порта вместо символа «x», соответственно для порта A ре¬гистры называются PORTA, DDRA, PINA, для порта B — PORTB, DDRB, PINB и т.д.
Следует заметить, что «регистры» PINx на самом деле регистрами не являются, по этим адресам осуществляется доступ к физическим значениям сигналов на выводах порта. Поэтому они доступны только для чтения, тогда как регистры PORTx и DDRx доступны и для чтения, и для записи.
Таким образом, запись в порт означает запись требуемого состояния для каждого вывода порта в соответствующий регистр данных порта PORTx. А чтение состояния порта выполняется чтением либо регистра данных порта PORTx, либо регистра выводов порта PINx. При чтении регистра выводов порта PINx происходит считывание логических уровней сигналов, присутствующих на выводах порта. А при чтении регистра данных порта PORTx происходит считывание данных, находящихся в регистре-защелке порта – это справедливо как для входных, так и для выходных контактов.
Любой порт микроконтроллера AVR можно сконфигурировать как вход или как выход. Для этой цели используется регистр DDRx. На вход или выход можно сконфигурировать сразу весь порт или только отдельный его вывод (контакт, пин).
Регистр DDRx определяет, является тот или иной вывод порта входом или выходом. Если некоторый разряд регистра DDRx содержит логическую единицу, то соответствующий вывод порта сконфигурирован как выход, в противном случае — как вход. Буква x в данном случае должна обозначать имя порта, с которым вы работаете. Таким образом, для порта A это будет регистр DDRA, для порта B — регистр DDRB и т. д.
В каких случаях имеет смысл использовать многоядерные микроконтроллеры
Ниже приведены несколько ключевых характеристик электронного устройства, которые можно улучшить за счёт использования многоядерных микроконтроллеров при решении определённых типов задач.
- Повышение производительности. Это, наверное, один из наиболее очевидных вариантов. Если микроконтроллер должен решать какую-то сложную задачу, которую можно разбить на несколько относительно независимых подзадач, эти подзадачи можно распределить между разными ядрами и за счёт этого ускорить вычисления.
- Повышение энергоэффективности. В некоторых устройствах большую часть времени микроконтроллер осуществляет нетребовательные к вычислительным ресурсам операции (опрос датчиков, оповещение, индикация), но при возникновении определённого события требуется решать некоторую ресурсоёмкую задачу. Для таких устройств подойдут микроконтроллеры, в которых имеется не очень производительное но энергоэффективное ядро (обычно Cortex M0) и как минимум одно высокопроизводительное ядро (например, Cortex M4). Первое ядро будет работать постоянно, а второе большую часть времени будет находиться в режиме сна. Высокопроизводительное ядро будет пробуждаться только в тех случаях, когда требуется большая вычислительная мощность.
- Повышение компактности и упрощение печатной платы. Бывают устройства, в которых используется сразу несколько микроконтроллеров. Иногда можно сделать устройство компактнее и проще, заменив несколько обычных микроконтроллеров одним многоядерным. Те задачи, которые раньше решались разными микроконтроллерами, теперь будут решаться разными ядрами в пределах одного микроконтроллера. Общее число компонентов и проводников на плате при этом станет меньше.