Настройки ПИД-регулятора
Наладка ПИД-регулятора сводится к определению коэффициентов Kp, Ki, Kd. Компоненты определяются из формулы:
По ним определяются передаточные функции системы автоматического регулирования и вычисляются ее параметры:
- Точность.
- Скорость регулирования.
- Форма графиков переходных процессов.
- Инерционность.
- Другие величины и функции.
Математическая модель САР не может дать полного представления о работе системы. Расчеты выполняются для «идеального регулятора». Нелинейность контролируемых параметров, внешние возмущения, помехи на объекте управления не позволяют применять данные расчетов для построения системы автоматического регулирования на практике. Результаты математических расчетов используют как вспомогательные данные.
При разработке ПИД-регуляторов и САР используют оборудование, имитирующее изменение контролируемых характеристик, измерительные приборы и ПК. Устройства позволяют определить и анализировать реакцию системы на воздействия и более точно подобрать коэффициенты.
На практике применяется опытный подбор коэффициентов. ПИД-регуляторы устанавливают на объекте, вводят коэффициенты, полученные при расчете или стендовых испытаниях, настраивают параметры на месте.
Настраиваем контроллер
Настройка параметров регулятора осуществляется с помощью инструмента PID Tuner, который доступен непосредственно в окне параметров блока PID Controller.
Приложение запускается нажатием на кнопку Tune…, расположенную на панели Automated tuning. Стоит отметить, что до выполнения этапа настройки параметров контроллера необходимо выбрать его вид (П, ПИ, ПД и др.), а также его тип (аналоговый или дискретный).
Поскольку одним из требований является ограничение его выходной координаты (напряжения на обмотке двигателя), то следует задать допустимый диапазон напряжений. Для этого:
- Переходим во вкладку Output Saturation.
- Нажимаем на флаговую кнопку Limit output, в результате чего активируются поля для задания верхней (Upper limit) и нижней (Lower limit) границы диапазона выходной величины.
- Устанавливаем границы диапазона.
Корректная работа блока регулятора в составе системы предполагает использования методов, направленных на борьбу с интегральным насыщением. В блоке реализованы два метода: back-calculation и clamping. Подробная информация о данных методах располагается здесь. Выпадающее меню выбора метода расположено на панели Anti-windup.
В рассматриваемом случае запишем значения 24 и -24 в поля Upper limit и Lower limit соответственно, а также используем метод clamping для исключения интегрального насыщения.
Можно заметить, что внешний вид блока регулятора изменился: появился знак насыщения рядом с выходным портом блока.
Далее, приняв все изменения нажатием кнопки Apply, возвращаемся во вкладку Main и нажимаем кнопку Tune…, в результате чего откроется новое окно приложения PIDTuner.
В графической области окна отображаются два переходных процесса: при текущих параметрах регулятора, т.е. для ненастроенного регулятора, и при значениях, подобранных автоматически. Новые значения параметров можно посмотреть, нажав на кнопку Show Parameters, расположенную на панели инструментов. При нажатии на кнопку появятся две таблицы: подобранные параметры регулятора (Controller Parameters) и произведенные оценки характеристик переходного процесса при подобранных параметрах (Performance and Robustness).
Как видно из значений второй таблицы, автоматически рассчитанные коэффициенты регулятора удовлетворяют всем требованиям.
Настройка регулятора завершается нажатием на кнопку с зеленым треугольником, расположенной справа от кнопки Show Parameters, после чего новые значения параметров автоматически изменятся в соответствующих полях в окне настройки параметров блока PID Controller.
Результаты моделирования системы с настроенным регулятором для нескольких входных сигналов показаны ниже. При больших уровнях входных сигналов (голубая линия) система будет работать в режиме с насыщением по напряжению.
Отметим, что инструмент PID Tuner подбирает коэффициенты регулятора по линеаризованной модели, поэтому при переходе к нелинейной модели требуется уточнять его параметры. В этом случае можно воспользоваться приложением Response Optimizer.
Три коэффициента ПИД регулятора и принцип работы
Работа ПИД-регулятора заключается в подаче выходного сигнала о силе мощности, необходимой для поддержания регулируемого параметра на заданном уровне. Для вычисления показателя используют сложную математическую формулу, в составе которой есть 3 коэффициента — пропорциональный, интегральный, дифференциальный.
Возьмем в качестве объекта регулирования ёмкость с водой, в которой необходимо поддерживать температуру на заданном уровне с помощью регулирования степени открытия клапана с паром.
Пропорциональная составляющая появляется в момент рассогласования с вводными данными. Простыми словами это звучит так — берется разница между фактической температурой и желаемой, умножается на настраиваемый коэффициент и получается выходной сигнал, который должен подаваться на клапан. Т.е. как только градусы упали, запускается процесс нагрева, поднялись выше желаемой отметки — происходит выключение или даже охлаждение.
Дальше вступает интегральная составляющая, которая предназначена для того, чтобы компенсировать воздействие окружающей среды или других возмущающих воздействий на поддержание нашей температуры на заданном уровне. Поскольку всегда присутствуют дополнительные факторы, влияющие на управляемые приборы, в момент поступления данных для вычисления пропорциональной составляющей, цифра уже меняется. И чем больше внешнее воздействие, тем сильнее происходят колебания показателя. Происходят скачки подаваемой мощности.
Синтез замкнутой системы и настройка регулятора
Состоящая из четырех рычагов модель механизма моделируется в SimMechanics, а двигатель постоянного тока моделируется в SimElectronics. Для создания архитектуры регулятора, показанной на рис. 2, следует добавить блок ПИД-регулятора с дискретизацией по времени из библиотеки Simulink Discrete. Теперь, когда система управления с обратной связью создана, можно перейти к настройке регулятора.
Для этого требуется открыть диалоговое окно блока PID Controller («ПИД-регулятор»), указать период дискретизации и нажать кнопку Tune («Настройка»). Откроется окно PID Tuner (рис. 3).
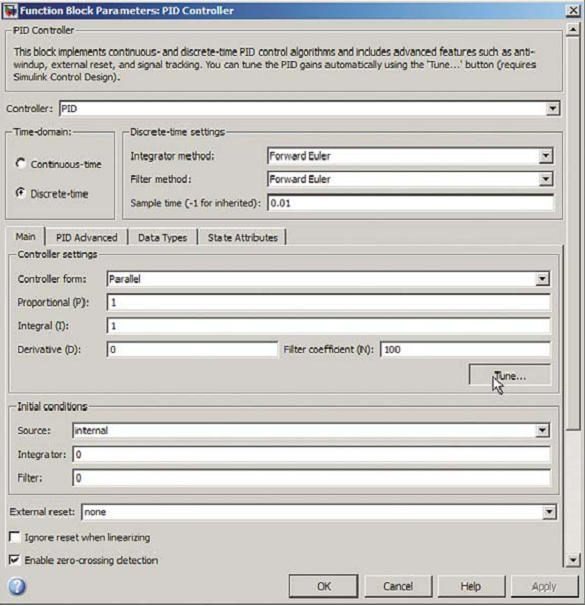
Рис. 3. Окно настройки PID Tuner, открытое с помощью диалогового окна блока
Интерфейс настройки Simulink Control Design линеаризует объект в текущей рабочей точке и строит линейную модель объекта с постоянными параметрами (LTI), с которой взаимодействует блок ПИД-регулятора в замкнутом контуре управления. Вычислительная задержка, связанная с дискретизацией сигнала, учитывается автоматически. Используя метод автоматической настройки, интерфейс Simulink Control Design вычисляет первоначальные коэффициенты усиления ПИД-регулятора. Этот метод не накладывает никаких ограничений на порядок объекта или постоянную времени, причем он работает в областях как непрерывного, так и дискретного времени.
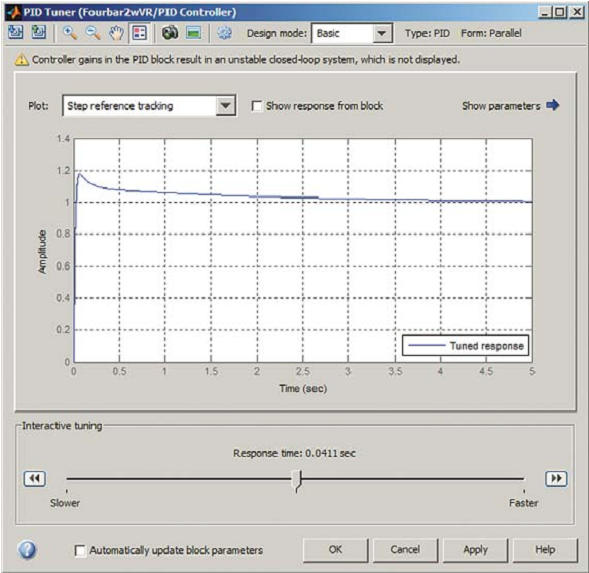
Рис. 4. Первоначальные параметры, рассчитанные PID Tuner
На рис. 4 показана реакция на ступенчатое воздействие в рабочей точке замкнутой системы с первоначальными коэффициентами ПИД-регулятора. Если регулятор работает удовлетворительно, следует нажать кнопку Apply («Применить»), чтобы обновить значения коэффициентов усиления P, I, D и N в диалоговом окне блока PID Controller («ПИД-регулятор»). Затем можно проверить работу системы, моделируя нелинейности и контролируя результаты (рис. 5). Также можно произвести настройку в интерактивном режиме с помощью ползунка, увеличивая или понижая быстродействие регулятора (рис. 4).
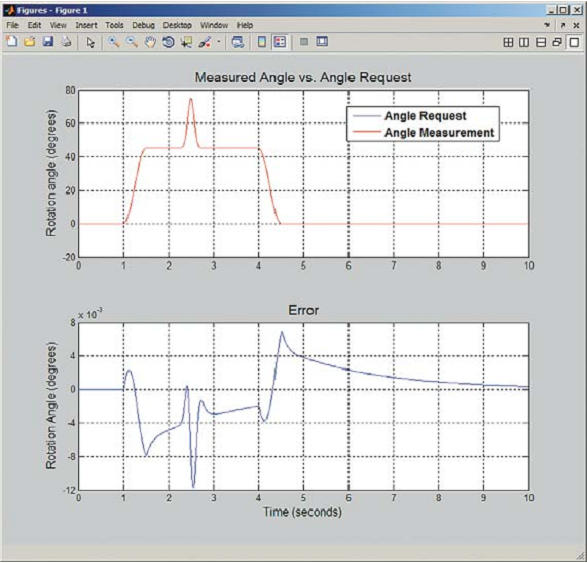
Рис. 5. Результаты моделирования модели четырехзвенного шарнирного механизма
Не все проблемы из-за плохих настроек PID
Перед настройкой PID, вы должны изучить и другие данные:
Вибрация
Не все колебания вызваны высоким значением P. Перед настройкой PID вам необходимо максимально устранить источники вибрации на вашем дроне. Например, балансировка двигателей и пропеллеров, жесткость рамы и т. д.
Центр тяжести (CG)
Центр тяжести должен быть ровно посередине, между всеми 4-мя двигателями. Плохая центровка приведет к тому, что одни двигатели будут работать больше, чем другие, отсюда перегрев моторов и плохая стабильность полета. Например, аккумулятор находится в задней части, вместо расположение по-середине и поэтому задние моторы будут работать на 100%, а передние на 80%. Вся масса на квадрокоптере должна быть отцентрована и расположена равномерно. По этой причине Х-образные рамы самые популярные.
Постановка задачи
Рассмотрим синтез цифрового ПИД-регулятора и нечеткого регулятора для системы управления ракетой по углу атаки. Методом математического моделирования определим процессы в системе и дадим сравнительную оценку качества системы при использовании синтезированных регуляторов.
Приняв за выходную координату ракеты угол атаки: ,
а за входную координату угол поворота руля определим передаточную функцию ракеты в виде:, где: – коэффициент преобразования ракеты, – коэффициент демпфирования, – постоянная времени.
Здесь и далее «передаточная функция» используется не в строгом классическом определении, как отношение перобразований лапласа.
При исследовании системы управления предположим, что зависимости параметров ракеты от времени полета определяются так:
Для упрощения расчетов, рулевой механизм опишем передаточной функцией интегрирующего звена В этом случае вход системы — заданный угол атаки, выход системы — отработанный ракетой угол атаки, m(t) – управляющий сигнал на выходе регулятора, а объект управления описывается общей передаточной функцией:
(В объект управления включены аналоговые рулевой механизм и ракета).
Закон изменения входного воздействия задан полиномом:
Необходимо разработать регулятор, обеспечивающий отработку входного воздействия с помощью ПИД-регулятора и регулятора на базе нечеткой логики.
Осуществить подбор коэффициентов регуляторов.
Произвести сравнение переходного процесса с ПИД-регулятором и c регулятором на базе нечеткой логики.
Как настроить PID по шагам
Убедитесь, что двигатели сбалансированы и у квадрокоптера нет вибрации настолько, насколько есть возможность ее снизить. Попытка настроить PID без «чистого» гироскопа (балансировка и снижение вибрации делается для того, чтобы гироскоп работал без помех) — это все равно, что строить дом без хорошего фундамента. Это видео расскажет вам о простом способе проверки вибрации. Отрегулируйте настройки низкочастотного фильтра (lowpass filter) по мере необходимости, чтобы достигнуть «чистого» сигнала гироскопа
Важно, чтобы этот шаг выполнялся в режиме Акро, даже если вы всегда летаете в режиме стабилизации/горизонта. Режимы Angle\Horizont имеют свои значения и мешают настройке PID
Пример параметров PID ниже соответствует Rewrite PID (PID controller #1). При выполнении этой первоначальной настройки установите значение TPA равным 0. При необходимости TPA может быть добавлен позже. Начинать настройки нужного с маленьких изменений настроек по умолчанию. и начинать нужно с коэффициента Р. Значение Р на Pitch и Roll равное 4.0 будет хорошей отправной точкой.Также, следует снизить I и D у Pitch и Roll для настройки Р с минимальными помехами. Поэтому рекомендуется установить для I — 20, а для D — 5. Для Yaw целесообразно взять значение по умолчанию и разделить на 2. и немного уменьшить значение I, чтобы исключить эту ось в качестве источника колебаний. Yaw настраивается последним. Во время тестовых полетов, увеличивайте параметр Р по оси Roll до тех пор пока не увидите колебания при приближении к полному газу, а также не услышите видимые и слышимые колебания. Затем установите значение параметра Р равным примерно 70% от значения вызвавшего колебания. Теперь думаю понятно, почему без опыта полетов на конкретном квадрокоптере у вас не получится настроить его PID’ы? Повторите шаг 4 для оси Pitch. Проверьте, держит ли квадрокоптер нужный угол наклона Roll и не дрейфует ли он при крене (roll), а затем несколько раз дайте резкий газ вверх и резко отпустите его в 0
Вот тут обратите внимание — угол крена который вы сделали до игры газом не должен существенно меняться. Если угол отклонения кажется вам сильно отклонившимся (дрон начал дрейфовать), увеличьте параметр I
Если все ок и дрейфа нет, не меняйте I. Вы можете поменять «ощущение» своего дрона, подняв или опустив параметр I после достижения хороших настроек PID, так как I не влияет на конечные значения P и D. Повторите шаг 6 для оси Pitch. Параметр D следует увеличивать на каждой оси ТОЛЬКО до такой степени, чтобы он помогал уменьшить отдачу после флипов и роллов (флип — переворот вбок, ролл — переворот «вверх ногами»), а также после колебаний после свободного падения, когда вы делаете газ в 0 и дрон падает, затем запускаете двигатели газом и они начинают как бы проваливаться в воздухе и в этот момент дрон начинает мотать из стороны в сторону. Когда такие проблемы пропадут благодаря увеличению параметра D, снизьте этот параметр до уровня 80-90% от этого уровня. Часто настройка Yaw не нужна, либо она будет минимальной, так как все равно может вызывать колебания, если ничего не делать. Начните с Yaw P и проверьте дрон на вибрации как в первом шаге, а также убедитесь, что нет вибраций, если вы дадите резкий и длинный газ или быстрый пролет вперед Начните увеличивать Yaw Р с шагом 5 до тех пор, пока не увидите вибрации в видео с камеры при полете вперед или полном газе. После этого немного уменьшите значение. Теперь нужно посмотреть данные в blackbox. Возможно, Yaw P будет немного колебаться, поэтому попробуйте увеличить Yaw gyro, чтобы посмотреть, действительно ли колебания доходят до гироскопа. Если Yaw gyro выглядит более менее ровным, то все в порядке. Теперь нужно настроить соотношение между P и I, то есть, будет ли квадрокоптер при резких поворотах сопротивляться или наоборот проваливаться в эти повороты. Очень низкие значения I приводят к смещению оси через некоторое время. Низкие значения I по оси также позволяют свободно менять положение, но при этом сохранять это положение. Более высокие значения по оси I будут хорошо держать позицию дрона, но могут иметь тенденцию сопротивляться движению + добавляется небольшое движение по инерции. Очень высокие значения приводят к «роботизированным» движениям дрона и создают колебания. После завершения настройки в режиме Акро, можно переходить к настройкам других режимов, например, Horizon (горизонт).
Помните, что не нужно слишком глубоко зарываться в изучение логов Blackbox для настройки идеальных PID. Если квадрокоптер летает хорошо и вас все устраивает, просто идите и летайте
Настраиваем пропорциональный коэффициент
Выставляем дифференциальный и интегральный коэффициенты в ноль, тем самым убирая соответствующие составляющие. Пропорциональный коэффициент выставляем в 1.
Далее нужно задать значение уставки температуры отличное от текущей и посмотреть, как регулятор будет менять мощность обогревателя, чтобы достичь заданного значения. Характер изменения можно отследить «визуально», если у вас получится мысленно представить этот график. Либо можно регистрировать в таблицу измеренное значение температуры каждые 5-10 секунд и по полученным значением построить график. Затем нужно проанализировать полученную зависимость в соответствии с рисунком:
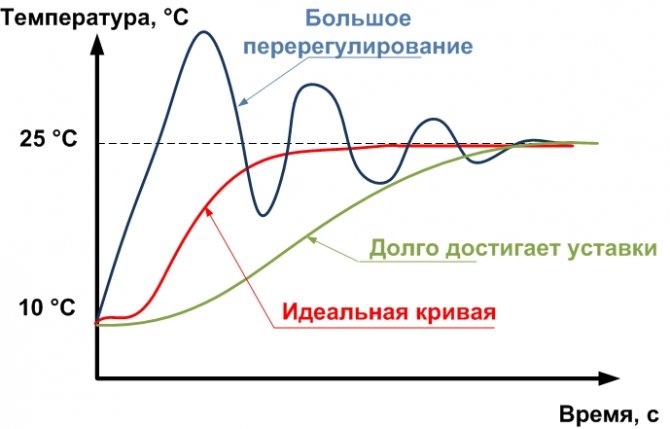
При большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать. Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
Настраивание ПИД-регулятора общего вида
Для такого поддержания давления существует прибор, который называется регулятором задания. Давление в трубах на датчике идет в сравнение с параметром заданного давления. Регулятор сравнивает системное давление с давлением задания, определяет задачу скорости для двигателя для изменения ошибки. Простой вид регулятора применяет план действий ПИД-регулирования. В нем применяются три составляющие типа регуляторов для удаления ошибки: дифференциальный, интегральный и пропорциональный регулятор.
Регулятор пропорционального типа
Такой регулятор – главный, скорость задается в прямой зависимости от ошибки. При применении пропорционального регулятора система будет иметь ошибку. Малые значения коэффициента регулятора пропорционального типа дают вялость системы, а высокие параметры к колебаниям и нестабильности системы.
Регулятор интегрального типа
Такой регулятор применяется для удаления ошибки. Скорость увеличится до удаления ошибки (снизится при негативной ошибке). Небольшие значения суммирующей составляющей слишком оказывают влияние на деятельность регулятора в общем. При установлении больших значений происходит промахивание системы, она функционирует с перерегулированием.
Регулятор дифференциального типа
Такой регулятор измеряет скорость корректировки ошибки, применяет для повышения системного быстродействия, увеличивает регуляторное быстродействие в общем. Во время увеличения быстродействия регулятора повышается перерегулирование. Это обуславливает к системной нестабильности. Во многих случаях составляющая дифференциальная становится равной нулю или близкой к наименьшему значению для того, чтобы предотвратить это состояние. Она бывает полезной в позиционирующей системе.
FAQ [править]
Можно ли использовать «чужие» настройки PID
Знание оптимальных настроек ПИД для конфигурации коптера, похожего на ваш, может помочь вам быстрее настроить свой мультикоптер, но имейте ввиду, что не бывает двух одинаковых коптеров, т.к. следующие пункты будут непременно вносить влияние в фактические значения коэффициентов ПИД:
- рама — вес/размер/материал/жесткость;
- двигатели – мощность/крутящий момент;
- расположение двигателей и расстояние между ними;
- контроллеры двигателей и передатчик – кривые мощности;
- винты (пропеллеры) – диаметр/шаг/материал;
- БАЛАНСИРОВКА
- и, конечно, навыки пилота.
Пиды лучше регулировать сразу с подвесом/камерой или можно после прицепить
Лучше регулировать сразу с подвесом/камерой, так как вес изменяется достаточно значительно, чтобы повлиять на поведение аппарата. Нюансы:
- Первичную регулировку можно выполнять и без подвеса, чтобы при возможных падениях его не повредить. А затем закрепить подвес и довести регулировку до конца.
- Также можно прикрепить к коптеру массо-габаритный макет подвеса/камеры и регулировать пиды сразу в рабочей конфигурации.
Составляющие ПИД-регулятора
В стандартном ПИД-регуляторе есть три составляющие и каждая из них по своему воздействует на управление.
Пропорциональная — P (t) = Kp * e (t)
Учитывает величину рассогласования заданного значения и фактического. Чем больше отклонения значения, тем больше будет выходной сигнал, то есть пропорциональная составляющая пытается компенсировать эту разницу.
Однако пропорциональный регулятор не способен компенсировать полностью ошибку рассогласования. Всегда будет присутствовать так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. При увеличении коэффициента пропорциональности Kp статическая ошибка уменьшается, но могут возникнуть автоколебания и снижение устойчивости системы.
Интегральная – I (t) = Ki ∫e (t) dt
Интегральная составляющая используется для устранения статической ошибки. Она складывает значение предыдущих ошибок рассогласования и компенсирует их, можно сказать, что учится на предыдущих ошибках. То есть ошибка рассогласования умножается на коэффициент интегрирования и прибавляется к предыдущему значению интегрирующего звена. При выходе системы на заданный режим, интегральная составляющая перестает изменяться и не оказывает какого-либо серьезного воздействия на систему. Физически интегральная составляющая представляет задержку реакции регулятора на изменение величины рассогласования, внося в систему некоторую инерционность, что может быть полезно для управления объектами c большой чувствительностью.
Дифференциальная – D (t) = Kd de (t)/dt
Дифференциальная составляющая учитывает скорость изменения регулируемой величины, противодействуя предполагаемым отклонениям, вызванными возмущениями системы или запаздыванием. И чем больше будет величина отклоняться от заданной, тем сильнее будет противодействие, оказываемое дифференциальной составляющей. То есть она предугадывает поведение системы в будущем. При достижении величины рассогласования постоянного значения дифференциальная составляющая перестает оказывать воздействие на управляющий сигнал.
На практике какая-либо из составляющих может не использоваться (чаще всего Д-дифференциальная) и тогда мы получаем П-регулятор, ПИ-регулятор.
ПД-регулятор
На видео с повышенной скоростью движения давайте обратим внимание на то, какие куски трассы для робота оказались наиболее сложными. Видно, что робот оказывается недорегулированным на сопряжённых поворотах, т.е
в тот момент когда робот повернул сначала в одну сторону, а потом ему требуется повернуть в другую. В этот момент сказывается накопленная инерция и мощности двигателей уже не хватает чтобы быстро повернуть робота в другую сторону.
Д-регулятор (дифференциальный регулятор) работает таким образом — считается изменение рассогласования за некоторый промежуток времени, а дальше необходимое управление считается как произведение этого изменения на некий коэффициент, который мы обозначим kD. Мы получим ПД-регулятор добавив Д-регулятор к уже имеющемуся П-регулятору.
int prev_error; void loop(void) { int avgSpeed = 150; // средняя скорость моторов int kP = 10; // коэффициент пропорциональной обратной связи int kD = 1; // коэффициент дифференциальной обратной связи int error; // Это ошибка положения error = bot_position(); correction = kP * error + kD * (error-prev_error); prev_error = error; motor1.move(avgSpeed*(1+correction)); motor2.move(avgSpeed*(1-correction)); delay(10); }
Мы добавили здесь переменную prev_error, расчёт дифференциальной коррекции kD * (error-prev_error), а также задержку в цикле — delay(10). Д-регулятор как видно из формулы, борется с высокой скоростью изменений ошибки. Т.е. он борется с инерцией и с колебаниями, и является обязательным для роботов, которые двигаются с высокими скоростями.
Недостаток Д-регулятора — это то, что в нашем случае он требует задержки в цикле управления. Значение ошибки error в нашем случае меняется редко, надо чтобы робот проехал какое-то расстояние чтобы ошибка изменилась, поэтому если мы задержку не введём, то Д-регулятор будет действовать очень кратковременно, только в тот короткий момент когда робот будет переходить с датчика на датчик. Величина задержки в цикле должна быть достаточной, чтобы за этот момент значение ошибки могло измениться на пару датчиков. Но то, что хорошо для Д-регулятора, то плохо для П-регулятора, который потеряет возможность быстро реагировать на изменение положения робота.
Второй недостаток Д-регулятора — подверженность шумам. Случайные скачки освещенности могут привести к неожиданному его срабатыванию.
Давайте рассмотрим более профессиональный код ПД-регулятора для нашего робота: int avgSpeed = 150; // средняя скорость моторов int kP = 10; // коэффициент пропорциональной обратной связи int kD = 5; // коэффициент дифференциальной обратной связи int correction; int err; int err_arr[] = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0}; int err_p = -1; prevErr = bot_position(); void loop(void) { err = bot_position(); err_p = (err_p + 1) % 10; err_arr = err; P = err * KP; D = (err_arr — err_arr)*KD; correction = P + D; motor1.move(avgSpeed*(1+correction)); motor2.move(avgSpeed*(1-correction)); delay(2); } В данном примере последние десять ошибок хранятся в массиве err_arr и Д-регулятор берет за основу вычисления коррекции разницу между текущим значением ошибки и значением ошибки 20 миллисекунд назад (время цикла 2мс * 10, где 10 — количество элементов в массиве). Д-регулятор позволяет значительно повысить скорость движения робота.
Если значение коэффициента обратной дифференциальной связи слишком велико, то робот с ПД-контроллером начнет «злиться» или «нервничать» — для такого робота характерны высокочастотные колебания, причем если для перерегулированной связи по «П» характерны колебания вправо-влево от желаемого направления движения, то перерегулировка по «Д» приводит к тому, что робот просто «дрожит».
Давайте уменьшим коэффициент kD и мы увидим, что робот стал идти намного ровнее, чем на П-контроллере, более того, теперь мы можем даже уменьшить коэффициент kP и робот все-равно будет успешно проходить трассу. Этот робот может на ПД-контроллере идти более чем вдвое быстрее, чем на П-контроллере.
Видно, что робот стал ехать как будто на хорошо настроенном П-контроллере, хотя мы знаем, что на такой скорости П-контроллер с этим роботом бы не справился. Или его пришлось бы сильно перерегулировать и это было бы заметно по его колебаниям. Д-контроллер в нашем случае как-будто делает двигатели более мощными, улучшает баланс робота, и повышает точность линейки.
Примечания и советы
В логах черного ящика высокие колебания P не выглядят как острые пики или большие волны. Эти колебания сначала проявляются в самом верху диапазона газа и выглядят как узкие синусоидные волны. Когда они появляются в логах, их еще не видно визуально или на слух, поэтому при начальной настройке (визуально и на слух) рекомендуется сначала достичь точки визуальных и звуковых колебаний, а затем снизить значения до 70%. К моменту, когда все колебания будут видны визуально или на слух, то в логах это тоже будет отчетливо отображаться.
Death Rolls (крен смерти)
Наиболее частой причиной, по которой квадрокоптер переворачивается и не останавливает двигатели — слишком низкое минимальное значение газа (throttle). Регулятор оборотов не может запустить двигатель после команды с низким значением газа (газ был какое-то время на 0). В журнале черного ящика, это отображается, как-будто двигатель управляется полным газом, но дрон продолжает крутиться. Первое, что нужно сделать, это увеличить настройку min_throttle (значение параметра Idle % при работе протокола DSHOT).
Вторая причина — либо плохой двигатель, либо плохой ESC, либо даже ослабленное крепление луча рамы. В этом случае, вы увидите в логах Blackbox, что двигатель как бы на полном газе, но луч рамы опускается (если включен акселерометр), что указывает на то, что двигатель не имеет тяги. Для проверки замените двигатель или регулятор оборотов.
Третья причина — неудачная комбинация ESC\мотор. Некоторые регуляторы оборотов просто не могут работать с современными двигателями. Здесь поможет только замена ESC на другой.
Дополнительная информация для версии BetaFlight 3 (3.0 и 3.1)
- PID-настройки по умолчанию очень хорошо настроены и работают на большинстве квадрокоптеров и для них требуется лишь незначительная настройка.
- Параметр Р у Roll и Pitch могут быть довольно высокими без возникновения дополнительных колебаний, поэтому их можно увеличивать до тех пор, пока не пропадут эти самые колебания при их присутствии. Этот параметр можно увеличить под самый потолок, пока у вас D на минималках и вы не получите новые колебания при резком управлении стиками.
- Настройка Yaw может потребовать настройки нижнего предела yaw_accel_limit и yaw_p_limit, особенно для двигателей большой мощности и высокого рейтинга KV.
- Некоторые мощные системы и сборки не работают с PID по умолчанию и требуют настройки с нуля, как написано выше по шагам, например, система гоночных двигателей DJI Snail System:
https://youtube.com/watch?v=8L2v10RS6io
Общие сведения о ПИД-регуляторе
Аббревиатура ПИД происходит от английского понятия PID, и расшифровывается как Proportional, Integral, Derivative. На русском языке это сокращение включает в себя три компонента или составляющие: пропорциональную, интегрирующую, дифференцирующую.
Принцип работы ПИД-регулятора наилучшим образом подходит для контуров управления, схема которых оборудована звеньями обратной связи. В первую очередь, это различные автоматические системы где формируются сигналы управления, обеспечивающие высокое качество и точность переходных процессов.
В состав управляющего сигнала ПИД-регулятора входят три основных компонента, складывающиеся между собой. Каждый из них находится в пропорции с определенной величиной:
- Первый – с сигналом рассогласования.
- Второй – с интегралом сигнала рассогласования.
- Третий – с производной сигнала рассогласования.
Если какой-либо компонент выпадет из этого процесса, то данный регулятор уже не будет представлять собой ПИД. В этом случае его схема будет просто пропорциональной, пропорционально-дифференцирующей, пропорционально-интегрирующей.
Поскольку эти приборы чаще всего используются для поддержания заданного уровня температуры, в том числе для чайников, целесообразно ПИД-регулятор рассматривать на практических примерах именно в этом ракурсе.
В самом процессе будет участвовать объект, на котором должна поддерживаться заданная температура. Все регулировки осуществляются извне. Другой составляющей будет само устройство с микроконтроллером, которое непосредственно решает имеющуюся задачу. Через измеритель на контроллер поступают данные об уровне температуры на данный момент. Мощность нагревателя отдельно контролируется специальным устройством. Для того чтобы установить требуемое значение параметров температуры, микроконтроллер нужно подключить к компьютеру.
Таким образом, исходными данными служат следующие температурные показатели: текущее значение и уровень, до которого должен нагреться или остыть рассматриваемый объект. На выходе должна получиться величина мощности, передаваемой к нагревательному элементу. Именно она обеспечивает необходимый температурный режим, позволяющий выполнить поставленную задачу. Для ее решения будут задействованы все три компонента, рассмотренные выше.
Внешние PID -регуляторы
Для управления оборудованием, не связанным с выходной частотой инвертора в ПЧ AS3 Toshiba, можно воспользоваться двумя независимыми PID-регуляторами PID3 и PID4. В качестве единиц измерения величины задания, величины выхода и величины обратной связи применяются проценты.
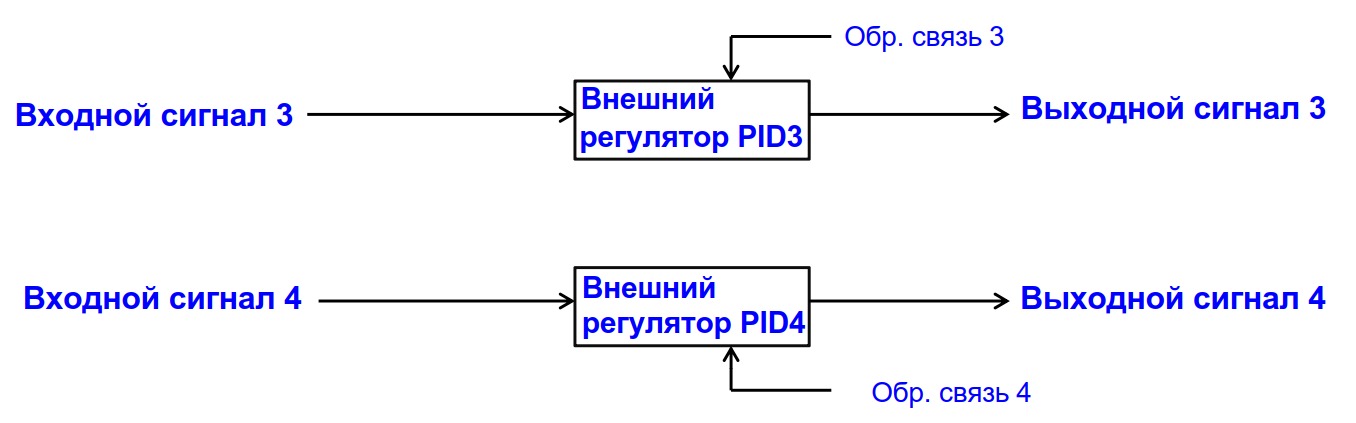
Схема двух внешних PID-регуляторов ПЧ Toshiba
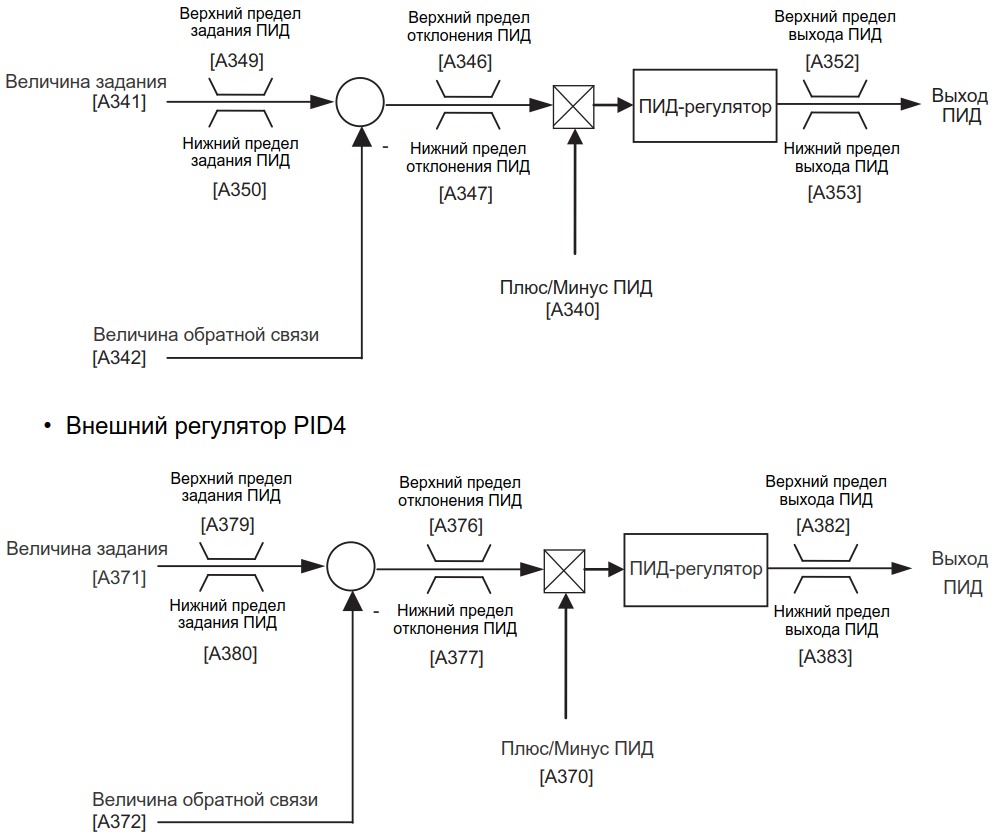
Схема задания параметров двух внешних PID-регуляторов частотников Toshiba
Важно! Выходной сигнал в момент включения внешнего PID-регулятора равен нулю. Когда внешний PID-регулятор выключается, выходной сигнал также становится равен нулю
Настройки внешних PID-регуляторов PID3 и PID4
| Параметр | Название | Диапазон настройки | Значение по умолчанию |
|---|---|---|---|
| A340 | A370 | PID-регулятор 3 | 4 | 0: Отключено1: Внешний PID-контроль процесса2: Внешний PID-контроль процесса (связь с входной клеммой)3…10: —11: Минус внешний PID-контроль процесса12: Минус внешний PID-контроль процесса (связь с входной клеммой) | |
| A341 | A371 | Выбор задания PID-регулятора 3 | 4 | 0: задается параметром FMOd/F2071: Клемма RR2: Клемма RX3: Клемма II4: Клемма AI4 (опция)5…11: —12: A357 | A387 | |
| A342 | A372 | Выбор входа обратной связи PID-регулятора 3 | 4 | 0: —1: Клемма RR2: Клемма RX3: Клемма II4: Клемма AI4 (опция) | |
| A344 | A374 | Пропорциональный коэффициент PID-регулятора 3 | 4 | 0.01 — 100.0 | 0.30 |
| A345 | A375 | Интегральный коэффициент PID-регулятора 3 | 4 | 0.01 — 100.0 | 0.20 |
| A346 | A376 | Верхний предел изменения PID-регулятора 3 | 4 | 0.0 — 250.0 (%) | 100.0 |
| A347 | A377 | Нижний предел изменения PID-регулятора 3 | 4 | 0.0 — 250.0 (%) | 100.0 |
| A348 | A378 | Дифференциальный коэффициент PID-регулятора 3 | 4 | 0.00 — 2.55 | 0.00 |
| A349 | A379 | Верхний предел задания PID-регулятора 3 | 4 | 0.0 — 250.0 (%) | 100.0 |
| A350 | A380 | Нижний предел задания PID-регулятора 3 | 4 | 0.0 — A349 | 0.0 — A379 (%) | 0.0 |
| A351 | A381 | Время задержки старта PID-регулятора 3 | 4 | 0 — 2400 (s) | |
| A352 | A382 | Верхний предел выхода PID-регулятора 3 | 4 | 0.0 — 250.0 (%) | 100.0 |
| A353 | A383 | Нижний предел выхода PID-регулятора 3 | 4 | 0.0 — 250.0 (%) | 0.0 |
| A357 | A387 | Величина задания PID-регулятора 3 | 4 | A350 — A349 | A380 — A379 (%) | 0.0 |
Настройка клемм дискретного входа/выхода ПЧ
| Клемма | Внешний регулятор PID3 | Внешний регулятор PID4 | Функция | ||
|---|---|---|---|---|---|
| Положительная логика | Отрицательная логика | Положительная логика | Отрицательная логика | ||
| Входная | |||||
| 154 | 155 | 156 | 157 | Включение внешнего PID-регулятора | |
| 162 | 163 | 170 | 171 | Сброс расчетов интегрального и дифференциального коэффициентов внешнего PID-регулятора | |
| 164 | 165 | 172 | 173 | Переключение плюс/минус характеристики | внешнего PID-регулятора | |
| Выходная | |||||
| 206 | 207 | 210 | 211 | Регулирование в пределах заданного диапазона изменения … | … внешнего PID-регулятора | |
| 204 | 205 | 208 | 209 | Внешнее PID-регулирование в процессе работы |
Мониторинг параметров работы внешнего PID-регулятора
| Мониторинг и клеммы аналогового выхода FM/AM/импульсы | Функция | |||
|---|---|---|---|---|
| Внешний регулятор PID3 | Внешний регулятор PID4 | |||
| Задание параметра | Регистр для мониторинга по цифровой сети | Задание параметра | Регистр для мониторинга по цифровой сети | |
| 130 | FD96 | 133 | FE96 | Величина задания внешнего PID-регулятора |
| 131 | FD97 | 134 | FE97 | Величина обратной связи внешнего PID-регулятора |
| 132 | FD98 | 135 | FE98 | Выходная величина внешнего PID-регулятора |
Частотник danfoss vlt micro fc 51. Проблемы с установками частоты.
У меня возникла следующая проблема. Купили вытяжную приточную установку вместе со щитом управления. К щиту управления подключаются преобразователи частоты VLT Micro Drive – Danfoss, на вытяжную вентиляцию и на приток.
Не знаю как разобраться в описании: как настраивать преобразователь частоты, чтобы он мог выключаться командой с управляющего пульта. Частотный преобразователь работает один. Подключили к нему сеть питания – он работает. Отключать его можно, выключив автоматический выключатель или нажав кнопку на корпусе прибора. Это очень неудобно.
Я изучал инструкцию, очень большую, ответа так и не нашел на мой вопрос. Нашел лишь то, что написано: «сигнал управления подается на контакт №18. Взял и подключил на этот контакт сигнал управления, но ничего не изменилось.
Оказалось, что надо искать причину от того, что на частотный преобразователь не подключены контакты термореле от моторов вентиляторов. Это контролирование тока. Учитывая эту информацию, настроили частотный преобразователь VLT Micro Drive – Danfoss во 2-й раз. Есть электрическая схема, но в ней ничего не понятно.
Похожие записи:
 10 наиболее часто задаваемых вопросов о преобразователях частоты переменного тока
10 наиболее часто задаваемых вопросов о преобразователях частоты переменного тока
 Освещение при съемке
Освещение при съемке
 Шаговые двигатели. принцип работы и управление
Шаговые двигатели. принцип работы и управление
 Модернизация энергосберегающей лампы в светодиодную №1
Модернизация энергосберегающей лампы в светодиодную №1
 Терморегулятор для котла отопления регулятор температуры
Терморегулятор для котла отопления регулятор температуры
 Как разобрать блок питания ноутбука? как вскрыть внутренний, внешний блок питания
Как разобрать блок питания ноутбука? как вскрыть внутренний, внешний блок питания