Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Принцип действия и устройство электрических машин
Принцип действия таких устройств основан на взаимодействии магнитных и электрических полей. Машины, в которых такое взаимодействие происходит при помощи магнитных полей, называются индуктивными, а в устройства с электрическим полем – емкостными. Последний тип не нашел применения в современной технике из-за неустойчивой работы во влажной среде.
Основные типы электрических машин это:
- электродвигатели – оборудование, преобразующие электрическую энергию в механическое движение.
- генераторы – устройства, позволяющие вырабатывать электрическую энергию при механическом воздействии.
Устройство электродвигателя
Основные элементы, из которых состоит типичный трехфазный двигатель таковы:
- Корпус, имеющий ножки, которыми он крепится к фундаменту;
- Статор, напоминающий по строению простой трансформатор. Имеет сердечник и обмотку При подаче тока создается вихревое электромагнитное поле.
- Ротор. Основная вращающаяся часть.
- Вал, на который жестко насажен ротор. Передняя часть выходит наружу, имеет шпоночную борозду под шестерни или шкив. На заднюю часть, выходящую за пределы корпуса насаживается крыльчатка для охлаждения и обдува.
- Подшипки, находящиеся в нишах передней и задней крышки.
- Герметичная клеммная коробка.
Принцип работы
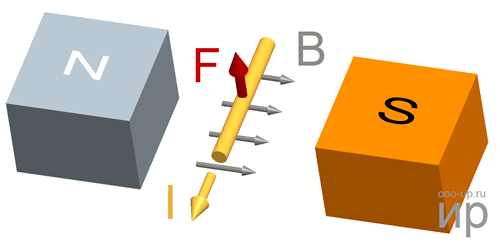
На провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами.
Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Рабочие моменты
Давайте разберем некоторые характеристики и особенности машин постоянного тока.
Пуск и режим реверса
 К электрическому двигателю подключен регулятор оборотов
К электрическому двигателю подключен регулятор оборотов
В момент, когда двигатель запускается, якорь имеет неподвижное положение, а значит, ЭДС в нем равна нулю. Из-за того, что сопротивление якорной обмотки очень маленькое, пусковой тока якоря намного превышает номинальный. Если представить себе такой пуск двигателя, то он однозначно бы вышел из строя.
- Чтобы такого не происходило, пусковой ток в двигателях постоянного тока с параллельным возбуждением ограничивается за счет включенного в цепь пускового реостата.
- Пуск при этом необходимо производить при номинальном значении магнитного потока, благодаря чему увеличивается пусковой момент и быстро растет ЭДС в обмотке якоря. В результате двигатель разгоняется быстрее, а время, когда проходит большой пусковой ток по обмотке сокращается.
- Когда разгон двигателя завершается, реостат выводится из цепи – делается это либо плавно, либо ступенчато.
- Для того чтобы остановить двигатель, достаточно отключить подачу питания к нему.
- Для любого электрического двигателя доступен режим вращения в обратном направлении – реверс. Для этого нужно всего лишь изменить направление тока либо в обмотке якоря, либо в обмотке статора.
Потери мощности и КПД
 Даже самый технически совершенный двигатель постоянного тока не может работать без потерь мощности
Даже самый технически совершенный двигатель постоянного тока не может работать без потерь мощности
Любой двигатель или генератор постоянного тока работает с потерями мощности. Их делят на два типа: основные и добавочные.
- К первым относят магнитные, электрические и механические.
- Магнитные потери, происходящие в стали обозначают ΔРс. Происходят они из-за того, что во время вращения сердечник на якоре постоянно перемагничивается, поэтому возникают потери на гистерезис и вихревые токи.
- Электрические потери (ΔРэл) происходят из-за активного сопротивления обмоток, а также сопротивления щеточного контакта, то есть данное значение представляется в виде суммы указанных потерь.
- Механические (ΔРмех) включают потери на трение подшипников, трение щеток о коллектор, трение вращающегося якоря о воздух (и такое есть) и вентиляционные потери.
- Все остальные потери называются добавочными и связаны они в основном с взаимодействием различных частей агрегата с магнитным полем.
 Потери незначительны при отсутствующей нагрузке
Потери незначительны при отсутствующей нагрузке
Для расчета каждого типа потерь применяются специальные формулы. Мы не будем так глубоко вдаваться в суть, а скажем лишь, что КПД машины постоянного тока определяется отношением отдаваемой мощности, к потребляемой. Выражают данное значение обычно в процентах.
Современные машины постоянного тока стали очень эффективными. КПД у них обычно варьируется в пределах 75-90%.
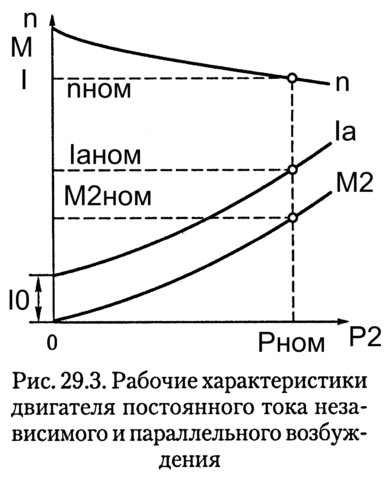
Рабочие характеристики
 Рабочие характеристики ДПТ
Рабочие характеристики ДПТ
Рабочие характеристики представляют собой следующие зависимости:
- Скорости вращения, потребляемого тока и мощности двигателя;
- КПД от полезной мощности при условии, что напряжение питания неизменно.
- Тока обмотки возбуждения и отсутствия добавочного сопротивления в цепи якоря.
Все эти параметры позволяют говорить о свойствах двигателей в режиме эксплуатации, а также находить оптимальные и экономичные режимы их работы.
Регулировка скорости вращения двигателя
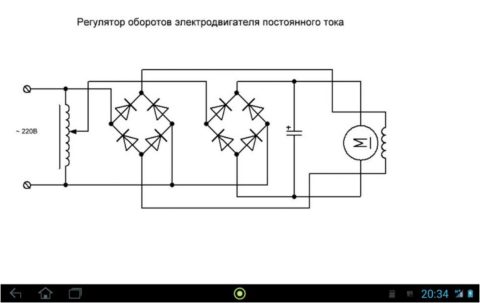 Принципиальная схема регулятора оборотов вращения
Принципиальная схема регулятора оборотов вращения
Регулировать скорость вращения машины постоянного тока можно тремя способами: изменение напряжения сети, реостатное регулирование, изменение магнитного потока. Давайте обо всем по порядку.
- Изменение напряжения осуществляется за счет устройств, которые могут, собственно, менять величину напряжения.
- Реостатное регулирование, как мы уже упоминали по ходу статьи, нуждается во введении в цепь якоря дополнительных резисторов активного типа, то есть меняющих свои характеристики при определенных условиях.
- Регулирование магнитного потока происходит за счет уменьшения тока возбуждения.
Конечно, мы назвали не все характеристики машин постоянного тока, а лишь основные, но для ознакомления с этими агрегатами этого вполне достаточно.
https://youtube.com/watch?v=eNo6ja-scE0
Видео в этой статье продемонстрирует, как работают данные устройства.
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
Техническая версия происхождения названия
По поводу происхождения этого термина, существует две версии, каждая из которых вполне правдоподобна. Согласно первой, наиболее распространенной, брно – аббревиатура, расшифровывающаяся как «блок расключения (или распределения) начал обмоток». Такая расшифровка выглядит вполне приемлемой, так как термином «брно двигателя», обозначается клеммная коробка, установленная на его корпусе, и в ней действительно соединяются определенным образом (расключаются) выводы концов обмоток электродвигателя.
Возможно, что причиной появления столь странного для русского языка названия, стало чрезмерное увлечение аббревиатурами в 20 30 х годах, когда и происходила «электрификация всей страны». Название «ГОЭЛРО», кстати, тоже аббревиатура – «Государственный план электрификации России».
Основополагающие законы электромеханического преобразования энергии в индуктивных машинах
Закон Ампера
Согласно закону, установленному Ампером, на проводник с током в магнитном поле действует сила
- где F – сила, Н,
- I – сила тока, А,
- – длина проводника, м,
- B — магнитная индукция, Тл,
- — угол между направлением тока и вектором магнитной индукции, град.
Направление этой силы определяется по правилу «левой руки».
Закон электромагнитной индукции Фарадея
Открытие электромагнитной индукции в году Фарадеем — одно из фундаментальных открытий в электродинамики. Максвеллу принадлежит следующая углубленная формулировка закона электромагнитной индукции:
Всякое изменение магнитного поля во времени возбуждает в окружающем пространстве электрическое поле.
Циркуляция вектора напряженности E этого поля по любому неподвижному замкнутому контуру s определяется выражением
,
- где E – напряженность электрического поля, В/м,
- ds – элемент контура, м,
- Ф — магнитный поток, Вб,
- t — время, с
Электродвижущая сила индукции возникающая в замкнутом контуре, равна скорости изменения во времени потока магнитной индукции
,
где – электродвижущая сила индукции, В
Знак «-» показывает, что индукционный ток, возникающий в замкнутом проводящем контуре имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток.
Принцип действия машин постоянного тока
Принцип действия машин постоянного тока.
Принцип действия генератора. Простейший генератор можно представить в виде витка, вращающегося в магнитном поле (рис. 1.4, а, б). Концы витка выведены на две пластины коллектора. К коллекторным пластинам прижимаются неподвижные щетки, к которым подключается внешняя цепь.
Принцип работы генератора основан на явлении электромагнитной индукции. Пусть виток приводится во вращение от внешнего приводного двигателя ПД. Проводники активной части витка пересекают магнитное поле и в них по закону электромагнитной индукции наводятся ЭДС e1 и e2, направление которых определяется по правилу правой руки. При вращении витка по направлению движения часовой стрелки в верхнем проводнике, находящемся под северным полюсом, ЭДС направлена от нас, а в нижнем, находящемся под южным полюсом, – к нам. По ходу витка ЭДС складываются, результирующая ЭДС е = е1 – е2.
Если внешняя цепь замкнута, то по ней потечет ток, направленный от нижней щетки к потребителю и от него – к верхней щетке. Нижняя щетка оказывается положительным выводом генератора, а верхняя – отрицательным. При повороте витка на 180° проводники из зоны одного полюса переходят в зону другого полюса и направление ЭДС в них изменяется на обратное. Одновременно верхняя коллекторная пластина входит в контакт с нижней щеткой, а нижняя – с верхней, направление тока во внешней цепи не изменяется. Таким образом, коллекторные пластины не только обеспечивают соединение вращающего витка с внешней цепью, но и выполняют роль переключающегося устройства, т. е. являются простейшим механическим выпрямителем.
Принцип действия двигателя. То же устройство работает в режиме электрического двигателя (рис. 1.5), если к щеткам подвести постоянное напряжение. Под действием напряжения U через щетки, пластины коллектора и виток потечет ток i. По закону электромагнитной силы (закон Ампера) взаимодействие тока и магнитного поля В создает силу f, которая направлена перпендикулярно i. Направление силы f определяется правилом левой руки (рис. 1.5): на верхний проводник сила действует вправо, на нижний – влево. Эта пара сил создает вращающий момент Мвр, поворачивающий виток по часовой стрелке. При переходе верхнего проводника в зону южного полюса, а нижнего – в зону северного полюса концы проводников и соединенные с ними коллекторные пластины вступают в контакт со щетками другой полярности.
Рис.1.5
Направление тока в проводниках витка изменяется на противоположное, а направление сил f, момента Мвр и тока во внешней цепи не изменяется. Виток непрерывно будет вращаться в магнитном поле и может приводить во вращение вал рабочего механизма (РМ).
Таким образом, коллектор в режиме двигателя не только обеспечивает контакт внешней цепи с витком, но и выполняет функцию механического инвертора, т.е. преобразует постоянный ток во внешней цепи в переменный ток в витке.
Рассмотрение принципа действия показывает, что машина постоянного тока может работать как в режиме генератора, так и в режиме двигателя, т. е. обладает свойством обратимости.
Противодействующий момент и противо-ЭДС. При работе машины в режиме генератора по замкнутой внешней цепи и витку обмотки якоря протекает ток, направление которого совпадает с направлением ЭДС (рис. 1.4,6), взаимодействие тока с магнитным полем полюсов создает момент М, направленный в рассматриваемом случае против часовой стрелки. Так как приложенный к витку вращающий момент приводного двигателя Мвр направлен по часовой стрелке, то возникающий при работе генератора момент называется противодействующим моментом Мnp. По существу возникновение Мпр — это реакция машины на воздействие внешнего момента Мвр, а физическая природа противодействующего момента та же, что и вращающего момента у двигателя. В установившемся режиме работы генератора между Мвр и Мпр устанавливается равновесие и Мвр=Мпр.
При работе машины в режиме двигателя проводники якоря пересекают магнитное поле и в них наводится ЭДС (рис. 1.5,б). Ее направление определяется по правилу правой руки. В рассматриваемом случае она направлена против тока и, следовательно, навстречу приложенному напряжению сети U и поэтому называется противо-ЭДС Enp. Физическая природа противо-ЭДС та же, что и ЭДС генератора. В установившемся режиме работы двигателя между Enp и U устанавливается равновесие и можно считать, что Enp ≈ U .
Таким образом, при работе машины постоянного тока в любом режиме во вращающихся проводниках наводится ЭДС Е и возникает момент М, но роль их в разных режимах различная.
Принцип действия двигателя постоянного тока — Почему он вращается?
Двигатель постоянного тока — это машина которая преобразует электрическую энергию в механическую. То есть, потребляя для своего вращения электрический ток, она приводит во вращение различные устройства. Это могут быть водяной или воздушный насос, стиральная машина или кофемолка. Электродвигателем постоянного тока, разумеется, такой двигатель называется потому, что для его питания используется постоянный электроток.
Рассмотреть принцип действия двигателя постоянного тока удобнее всего на небольшой модели. Поскольку, с одной стороны, у модели принцип работы тот же что и у большого двигателя. А с другой стороны, модель рассматривать удобнее. Потому как она маленькая, со всех сторон для взгляда открыта и деталей на ней меньше.
Модель двигателя постоянного тока состоит из ротора и статора. Ротор — это подвижная часть двигателя. Статор — неподвижная (статичная) часть. В данном случае статор двигателя является индуктором, а ротор якорем. То есть, ток питания сети протекает в роторе.
Главной частью статора является магнит. Так как у мы рассматриваем самую простейшую модель двигателя, магнит постоянный и всего один. Магнит находится в верхней части модели. К двум полюсам магнита присоединяются две железные пластины. Пластины присоединяются таким образом, что они образуют с двух сторон модели двигателя два полюса — северный и южный. То есть, пластины служат продолжением полюсов магнита. Между полюсами находится ротор двигателя.
На ротор наматывается катушка из медного провода. Два вывода катушки подсоединяются к двум контактным пластинкам-ламелям. Эти пластинки имеют полусогнутую форму и располагаются на цилиндре. Причем, цилиндр является изолятором. То есть, обе пластинки изолированны друг от друга. Цилиндр с пластинками является коллектором двигателя постоянного тока. Потому подобные виды двигателей постоянного тока называются коллекторными. Обычно под коллектором понимается устройство что-либо собирающее. Данный коллектор закрепляется на одной оси с ротором. Иначе говоря, при вращении ротора, вращается также и коллектор.
С ламелями соприкасаются пружинные щетки. В свою очередь, с щетками соединены контактные площадки, на которые подается питание постоянным током. В результате, когда на контакты подается питание, ротор начинает вращаться. То есть, при подключении питания, по катушке ротора начинает течь постоянный ток. Иначе говоря, ротор становится электромагнитом. У ротора появляются два полюса, так же как и у статора. Соответственно, магнитные полюса статора притягивают противоположные полюса ротора. Ротор разворачивается становится горизонтально. Вместе с ротором поворачивается и коллектор. В этом положении щетки не прикасаются к пластинам и ток перестает течь по обмотке ротора. То есть, ротор перестает быть электромагнитом.
Разумеется, движение ротора начинает замедлятся. Однако, по инерции ротор всё ещё вращается. И за это время пластины успевают повернуться и прикоснуться к противоположным контактам источника питания. Благодаря этому ток начинает течь по катушке ротора в противоположном направлении. То есть, ротор опять стал электромагнитом, но полюса у него поменялись на противоположные. Ротор опять разворачивается и цикл повторяется снова и снова. Таким образом и работает простейший двигатель постоянного тока.
Несомненно, мы рассмотрели самую простую модель электродвигателя. Однако, на этой модели очень хорошо виден сам принцип работы двигателя постоянного тока. Безусловно, обычно двигатели постоянного тока устроены сложнее. К примеру, часто их статор состоит из двух магнитов, а ротор выполнен трехполюсным. А также, постоянные магниты на статоре могут быть заменены или дополнены электромагнитами. Двигатели с таким устройством работают намного более надежно. Обычно чем мощнее двигатель, тем сложнее его устройство. Очень сильно работа двигателя постоянного тока зависит от подключения его обмоток. Причем, существует несколько способов их подключения. Стоит отметить также то, что, кроме коллекторных двигателей, существуют и бесколлекторные электродвигатели постоянного тока.
Для вашего удобства подборка публикаций
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока. Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Рисунок 3. Ротор с тремя обмотками
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.