Arduino Mega 2560 R3
Ардуино Мега 2560 снабжена микроконтроллером ATmega2560 с тактовой частотой 16 мГц.
Характеристики Ардуино Мега 2560
- Микроконтроллер: ATmega2560
- Тактовая частота: 16 мГц
- Рабочее напряжение: 5 В
- Предельные напряжения питания: 5-20 В
- Рекомендуемое напряжение питания: 7-12 В
- Максимальная сила тока с одного вывода: 40 мА
- Цифровые входы/выходы: 54
- Цифровые входы/выходы с поддержкой ШИМ: 15
- Аналоговые входы: 16
- Flash-память: 256 КБ (8 из них используются загрузчиком)
- SRAM: 8 КБ
- EEPROM: 4 КБ
Подключение Arduino Mega 2560 к питанию
Эту плату можно питать четырьмя разными способами:
Через порт USB. Можно питать ардуино от компьютера, powerbank, смартфона (если он поддерживает режим OTG) или от адаптера, вставленного в розетку.
Через пин +5V. Этот пин является не только выводом, но и вводом. Будьте внимательны! На этот пин нужно подавать ровно 5 вольт. В противном случае можно спалить сам микроконтроллер.
Через штекер питания, расположенный на плате. Можно использовать, батарейки, аккумуляторы и разнообразные блоки питания. Этот штекер подключен к пину VIN
О напряжении и мерах предосторожности написано в следующем пункте.
Через пин VIN. Ток от этого пина проходит через встроенный стабилизатор напряжения
По заявлениям производителя можно подавать от 5 до 20 вольт. Но это не совсем так. Так как стабилизатор имеет не 100% КПД, то при подаче 5 вольт на пин VIN напряжения может не хватить на питание микроконтроллера, да и на цифровых пинах будет не 5 вольт, а меньше. Также не стоит работать на максимальном напряжении. При 20 вольтах на пине VIN будет сильно греться стабилизатор напряжения, вплоть до выхода из строя. Поэтому рекомендуется использовать напряжение от 7 до 12 вольт.
Характеристики платы
Техническая сторона Arduino Pro Mini:
- рабочее напряжение, требуемое для нормальной работоспособности – 3,3 и 5 Вольт;
- напряжение, используемое при входе – 3-12 или 5-12 Вольт;
- количество цифровых входов и выходов – 14 штук, 6 из которых эксплуатируются как выходы ШИМ;
- состояние постоянного тока, требуемого для входа и выхода – 40 мА;
- flash-память – 16 Кб, но 2 Кб предназначены для загрузчика;
- оперативная память – 1 Кб;
- eeprom – 512 байт;
- частота тактов – в первой модели 8 МГц, а во второй 16 МГц;
- Arduino pro включает i2c-интерфейс.
Также стоит отдельно сказать про размеры платы — они, на самом деле очень скромные. Многие кто знакомятся с линейкой Ардуино в первый раз всегда удивляются размерам, когда достают контроллер из коробки.
Ниже вы можете оценить плату в дюймах и в сантиметрах.
Технические характеристики
- Микроконтроллер – ATmega2560
- Рабочее напряжение – 5 вольт
- Входное напряжение (рекомендуемое) – 7-12 вольт
- Входное напряжение (лимит) – 6-20 вольт
- Цифровые I/O контакты – 54 (из которых 15 можно использовать для ШИМ)
- Входные аналоговые контакты – 16 шт.
- Максимальная сила тока на один I/O контакт – 20 миллиампер
- Максимальная сила тока на контакт 3.3V – 50 миллиампер
- Flash-память – 256 Кб, из которых 8 Кб используются загрузчиком
- SRAM – 8 Кб
- EEPROM – 4 Кб
- Тактовая частота – 16 МГц
- Встроенный светодиод (LED_BUILTIN) – 13-ый
- Длина – 101,52 мм.0,00102 километр <br />1,015 метр <br />10,152 сантиметр <br />
- Ширина – 53,3 мм.5,33e-4 километр <br />0,533 метр <br />5,33 сантиметр <br />
- Вес – 37 грамм
GPIO
Начнем с пинов, которых больше всего, это GPIO, с англ. General Purpose Input-Output, входы-выходы общего назначения, на плате они подписаны как D0–D13 и A0–A5. По картинке распиновки они называются PD*, PB* и PC*, (вместо звёздочки – цифра) отмечены тёмно-бежевым цветом. Почему “официально” они называются PD/PB/PC? Потому что пины объединены в пОрты по несколько штук (не более 8), на примере Нано есть три порта: D, B и C, соответственно пины так и подписаны: PD3 – Port D 3 – третий выход порта D. Это цифровые пины, способные выдавать логический сигнал (0 или VCC) и считывать такой же логический сигнал. VCC это напряжение питания микроконтроллера, при обычном использовании обычной платы Ардуино это 5 Вольт, соответственно это 5 вольтовая логика: 0V – сигнал низкого уровня (LOW), 5V – высокого уровня (HIGH). Напряжение питания микроконтроллера играет очень большую роль, об этом мы ещё поговорим. GPIO имеют несколько режимов работы: вход (INPUT), выход (OUTPUT) и вход с подтяжкой к питанию встроенным в МК резистором на 20 кОм (INPUT_PULLUP). Подробнее о режимах поговорим в отдельном уроке.
Все GPIO пины в режиме входа могут принять сигнал с напряжением от 0 до 5 вольт (на самом деле до 5.5 вольт, согласно даташиту на микроконтроллер). Отрицательное напряжение или напряжение, превышающее 5.5 Вольт приведёт к выходу пина или даже самого МК из строя. Напряжение 0-2.5 вольта считается низким уровнем (LOW), 2.5-5.5 – высоким уровнем (HIGH). Если GPIO никуда не подключен, т.е. “висит в воздухе”, он принимает случайное напряжение, возникающее из за наводок от сети (провода 220в в стенах) и электромагнитных волн на разных частотах, которыми пронизан современный мир.
GPIO в режиме выхода (OUTPUT) являются транзисторными выходами микроконтроллера и могут выдать напряжение 0 или VCC (напряжение питания МК). Стоит отметить, что микроконтроллер – логическое, а не силовое устройство, его выходы рассчитаны на подачу сигналов другим железкам, а не на прямое их питание. Максимальный ток, который можно снять с GPIO выхода ардуино – 40 мА. Если попытаться снять больше – пин выйдет из строя (выгорит выходной транзистор и всё). Что такое 40 мА? Обычный 5мм одноцветный светодиод потребляет 20 мА, и это практически единственное, что можно питать напрямую от Ардуино. Также не стоит забывать о максимальном токе со всех пинов, он ограничен 200 мА, то есть не более 10 светодиодов можно запитать от платы на полную яркость…
Схема подключения Ардуино Мега 2560
Прежде чем рассмотреть сборку, поговорим немного о программировании платформы. Для этой цели применяется среда разработки Ардуино IDE и соответствующий специализированный софт (знакомый нам под названием библиотеки). Основными считаются:
- Стандартная библиотека Wire (для управления интерфейсом TWI).
- SPI (для одноименной шины).
- SoftwareSerial (реализация последовательной связи на цифровых выводах Mega2560).
Плата поставляется с записанным загрузчиком, потому прошивка устройства, переустановка драйвера и другие необходимые программные манипуляции не занимают много времени. Кроме того, продумана опция программирования через блок ICSP либо внешний программатор.
Ну а теперь для наглядности и понимания работы устройства приведем пример простой схемы сборки Wi-Fi модуля ESP8266 на базе контроллера Мега:
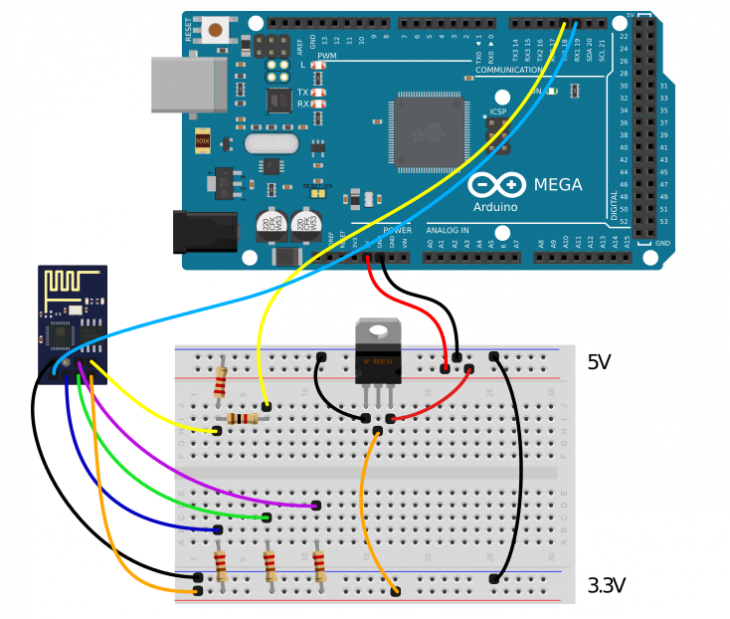
Вам не хватает в проектировании возможностей и контроллер Уно слишком мал для вас? – Воспользуйтесь платой Мега, собирайте интересные проекты и развивайтесь во всех направлениях. До скорой встречи!
Источник
Особенности проектов
Большинство электронщиков предпочитают создавать свои проекты на основе микроконтроллера Аrduino Uno, о которой и мы писали уже несколько раз.
Для начала стоит познакомиться с функционалом микропроцессора Ардуино уно, на котором строится большинство проектов, а также рассмотреть причины выбора данного приспособления. Ниже описаны факторы, по которым начинающему изобретателю стоит остановиться на Аrduino uno:
- Довольно простой в использовании интерфейс. Понятно, где какой контакт, и к чему прикреплять соединительные провода.
- Чип на плате подключается прямо к USB-порту. Преимущество этой установки заключается в том, что последовательная связь – это очень простой протокол, который проверен временем, а USB делает соединение с современными компьютерами очень удобным.
- Легко найти центральную часть микроконтроллера, которая представляет собой чип ATmega328. Он имеет больше аппаратных функций, таких как таймеры, внешние и внутренние прерывания, пины PWM и несколько режимов ожидания.
- Устройство с открытым исходным кодом, поэтому большое количество радиолюбителей могут исправить баги и неполадки в программном обеспечении. Это облегчает отладку проектов.
- Тактовая частота равна 16 МГц, что достаточно быстро для большинства приложений и не ускоряет работу микроконтроллера.
- Очень удобно управлять мощностью внутри него, и она имеет функцию встроенного регулирования напряжения. Также микроконтроллер можно отключить от USB-порта без внешнего источника питания. Можно подключить внешний источник питания до 12 В. Причем микропроцессор сам определит нужное напряжение.
- Наличие 13 цифровых контактов и 6 аналоговых контактов. Эти пины позволяют подключать оборудование к плате Arduino uno со стороннего носителя. Контакты используются в качестве ключа для расширения вычислительной способности Arduino uno в реальном мире. Просто подключите свои электронные устройства и датчики к разъемам, которые соответствуют каждому из этих контактов.
- Имеется в наличии разъем ICSP для обхода USB-порта и сопряжения с Arduino напрямую в качестве последовательного устройства. Этот порт необходим, чтобы перезагрузить чип, если он поврежден и больше не может использоваться на вашем компьютере.
- Наличие 32 КБ флэш-памяти для хранения кода разработчика.
- Светодиод на плате подключается к цифровому контакту 13 для быстрой отладки кода и упрощения этого процесса.
- Наконец, у него есть кнопка для сброса программы на чипе.
Arduino был создан в 2005 году двумя итальянскими инженерами – Дэвидом Куартиллесом и Массимо Банзи с целью, чтобы ученики научились программировать микроконтроллер Arduino uno и улучшить свои навыки в области электроники и использовать их в реальном мире.
Arduino uno может воспринимать окружающую среду, получая вход от различных датчиков, и способен влиять на окружающую среду, контролируя свет, двигатели и другие исполнительные механизмы. Микроконтроллер запрограммирован с использованием языка программирования Arduino (на основе проводки) и среды разработки Arduino (на основе обработки).
Теперь переходим непосредственно к проектам на Аrduino uno.
Добавление устройств АТмега
Есть один нюанс по работе с эти чипом — нам нужно внести некоторые изменений в один файл, чтобы дальше можно было бы программировать микроконтроллеры Arduino ATmega8.
Вносим следующие изменения в файл hardware/arduino/boards.txt:
atmega8o.name=ATmega8 (optiboot 16MHz ext) atmega8o.upload.protocol=arduino atmega8o.upload.maximum_size=7680 atmega8o.upload.speed=115200 atmega8o.bootloader.low_fuses=0xbf atmega8o.bootloader.high_fuses=0xdc atmega8o.bootloader.path=optiboot50 atmega8o.bootloader.file=optiboot_atmega8.hex atmega8o.bootloader.unlock_bits=0x3F atmega8o.bootloader.lock_bits=0x0F atmega8o.build.mcu=atmega8 atmega8o.build.f_cpu=16000000L atmega8o.build.core=arduino:arduino atmega8o.build.variant=arduino:standard ############################################################## a8_8MHz.name=ATmega8 (optiboot 8 MHz int) a8_8MHz.upload.protocol=arduino a8_8MHz.upload.maximum_size=7680 a8_8MHz.upload.speed=115200 a8_8MHz.bootloader.low_fuses=0xa4 a8_8MHz.bootloader.high_fuses=0xdc a8_8MHz.bootloader.path=optiboot a8_8MHz.bootloader.file=a8_8MHz_a4_dc.hex a8_8MHz.build.mcu=atmega8 a8_8MHz.build.f_cpu=8000000L a8_8MHz.build.core=arduino a8_8MHz.build.variant=standard ############################################################## a8_1MHz.name=ATmega8 (optiboot 1 MHz int) a8_1MHz.upload.protocol=arduino a8_1MHz.upload.maximum_size=7680 a8_1MHz.upload.speed=9600 a8_1MHz.bootloader.low_fuses=0xa1 a8_1MHz.bootloader.high_fuses=0xdc a8_1MHz.bootloader.path=optiboot a8_1MHz.bootloader.file=a8_1MHz_a1_dc.hex a8_1MHz.build.mcu=atmega8 a8_1MHz.build.f_cpu=1000000L a8_1MHz.build.core=arduino a8_1MHz.build.variant=standard ############################################################## a8noboot_8MHz.name=ATmega8 (no boot 8 MHz int) a8noboot_8MHz.upload.maximum_size=8192 a8noboot_8MHz.bootloader.low_fuses=0xa4 a8noboot_8MHz.bootloader.high_fuses=0xdc a8noboot_8MHz.build.mcu=atmega8 a8noboot_8MHz.build.f_cpu=8000000L a8noboot_8MHz.build.core=arduino a8noboot_8MHz.build.variant=standard
Таким образом, если мы перейдем в меню Сервис → Плата, то увидим устройства:
- ATmega8 (optiboot 16MHz ext)
- ATmega8 (optiboot 8 MHz int)
- ATmega8 (optiboot 1 MHz int)
- ATmega8 (no boot 8 MHz int)
Плата Arduino Mega 2560
Устройство Arduino Mega 2560 собрано на микроконтроллере ATmega 2560 (datasheet), является обновлённой версией Arduino Mega.
Для осуществления преобразования USB–UART-интерфейсов используется новый микроконтроллер ATmega 16U2 ( либо ATmega 8U2 для версий плат R1 или R2).
Состав платы следующий:
- количество цифровых входов/выходов составляет 54 (15 из них можно использовать в роли выходов-ШИМ);
- число аналоговых входов – 16;
- реализация последовательных интерфейсов производится посредством 4 аппаратных приёмопередатчиков UART;
- 16 МГц – кварцевый резонатор;
- USB-разъём;
- питающий разъём;
- внутрисхемное программирование осуществляется через ICSP-разъём;
- кнопка для сброса.
В устройстве Mega 2560 R2-версии добавлен специальный резистор, подтягивающий HWB-линию 8U2 к земле, что позволяет значительно упростить переход Arduino в DFU-режим, а также обновление прошивки. Версия R3 незначительно отличается от предыдущих. Изменения в устройстве следующие:
- добавлены четыре вывода – SCL, SDA, IOREF (для осуществления совместимости по напряжению различных расширительных плат) и ещё один резервный вывод, пока не используемый;
- повышена помехоустойчивость по цепи сброса;
- увеличен объём памяти;
- ATmega8U2 заменён на микроконтроллер ATmega16U2.
Выводы Arduino Mega 2560R3 предназначаются для следующего:
- Имеющиеся цифровые пины могут служить входом-выходом. Напряжение на них – 5 вольт. Каждый пин обладает подтягивающим резистором.
- Аналоговые входы не оснащены подтягивающими резисторами. Работа основана на применении функции analog Read.
- Количество выводов ШИМ составляет 15. Это цифровые выводы №2 – №13, №44 – №46. Использование ШИМ производится через функцию analog Write.
- Последовательный интерфейс: выводы Serial: №0 (rx), №1 (tx); выводы Serial1: №19 (rx), №18 (tx); выводы Serial2: №17 (rx), №16 (tx); выводы Serial3: №15 (rx), №14 (tx).
- Интерфейс SPI оборудован выводами №53 (SS), №51 (MOSI), №50 (MISO), №52 (SCK).
- Вывод №13 – встроенный светодиод.
- Пины для осуществления связи с подключаемыми устройствами: №20 (SDA), №21 (SCL).
- Для внешних прерываний (низкий уровень сигнала, другие изменения сигнала) используются выводы №2 , №3, №18, №19, №20, №21.
- Вывод AREF задействуется командой analog Reference и предназначается для регулирования опорного напряжения аналоговых входных пинов.
- Вывод Reset. Предназначен для формирования незначительного уровня (LOW), что приводит к перезагрузке устройства (кнопка сброса).
Прошивка arduino pro mini
Прошивка arduino pro mini
Миниатюрные размеры платы не позволяют прошить ее без внешней помощи. Есть несколько способов заливки скетча в микроконтроллер:
- Через адаптер USB в TTL;
- Через Ардуино Уно;
- Через SPI интерфейс с помощью любой платы ардуино с разъемом для подключения к компьютеру.
Самым простым методом является первый.
Прошивка через адаптер USB в TTL
В продаже можно найти специальный адаптер – UART переходник. Видов таких переходников много, стоимость каждого изделия невысокая. Советуется приобретать переходники с контактами RST или DTR, они упрощают процесс прошивки.
Для прошивки нужно подключить адаптер в Ардуино: нужно соединить земли с одного и другого устройства, Vcc – на +5В или +3,3 В (в зависимости от модели), RX – TX, TX – RX. Затем конструкцию нужно подключить к компьютеру, установить драйвер и начать прошивку. Компьютер определит, к какому порту подключена плата. Драйвер можно скачать с официального сайта. Скачанный архив нужно распаковать и установить.
Затем нужно запустить среду разработки Adruino IDE, выбрать нужную плату и номер порта и загрузить микропрограмму. Это делается следующим образом:
- Нажать «Загрузить»;
- Затем начнется компиляция – появится надпись «Компиляция скетча»;
После появление надписи «Загружаем» нужно нажать на плате кнопку Reset (в переходниках с RST или DTR нажимать кнопку не нужно).
Важно! Нажатие на Reset должно быть кратковременным.
Скетч будет загружен в микроконтроллер. Об успешном окончании процедуры можно понять по мигающему светодиоду.
Прошивка через Ардуино Уно
Для прошивки потребуется классическая плата Ардуино Уно в DIP корпусе. На ней должен быть специальный разъем, из которого нужно вытащить аккуратно микроконтроллер
Важно делать все действия внимательно, чтобы не погнуть ножки процессора
Проводами нужно подключить arduino pro mini к разъему. Как подключить контакты – RX-RX, TX-TX, GND-GND, 5V-VCC, RST-RST.
После подключения можно начать стандартную загрузку скетча через Arduino IDE.
Прошивка через SPI интерфейс
Этот способ является самым неудобным и трудоемким. Прошивание платы производится в 2 этапа:
Прошивка микроконтроллера Ардуино Уно как ISP программатора;
Настройка среды разработки и загрузка кода в Arduino Pro Mini.
Алгоритм проведения первого этапа:
- Запуск среды разработки Arduino IDE;
- Открытие «Файл» – «Примеры» – «11. ArduinoISP» – «ArduinoISP»;
- Далее «Инструменты» – «Плата» – «Ардуино уно»;
- «Инструменты» – «Порт», и выбирается нужный номер COM порта;
- Далее нужно произвести компиляцию и загрузить код в Ардуино Уно.
Затем обе платы нужно соединить проводниками по приведенной схеме: 5V – VCC, GND – GND, MOSI (11) – MOSI (11), MISO (12) – MISO (12), SCK (13) – SCK (13).
Теперь нужно настроить Arduino IDE для Arduino Pro Mini. Это делается следующим образом:
«Инструменты» – «Плата» – выбор нужной платы Arduino Pro Mini;
- В том же меню выбирается «Процессор» – выбор соответствующего процессора с нужной тактовой частотой;
- Затем нужно установить порт, к которому подключена плата;
- «Инструменты» – «Программатор» – Arduino as ISP;
- Затем нужно загрузить скетч через программатор.
Важно отметить, что загрузка кода должна происходить через специальное меню «загрузить через программатор». Здесь можно запутаться, потому такой способ и неудобен
Загрузка обычным способом приведет тому, что код зальется в Ардуино Уно.
После проведенной загрузки перепрошить микроконтроллер через переходник больше не получится. Придется заливать новый bootloader через «записать загрузчик».
Если при каком-либо виде загрузки прошивки возникают проблемы, нужно проверить подключение платы.
Чип Atmega2560
Atmega2560 – это очень мощный чип. В распоряжении разработчика целых 256 кб Flash (в ардуино 8 кб занимает загрузчик), 8 кб SRAM и 1 кб EEPROM. Работает ардуино с таким сердцем на частоте 16 мГц, впрочем, как и младшие платы – UNO и многие другие.
Питание платы может осуществляться как от круглого разъёма питания 2.1 мм с плюсом по центру, так и от USB порта, источник выбирается автоматически.
Стоит отметить, что при напряжении питания 7-20 вольт, плата работает отлично, а при меньшем, например, 5 вольт, могут возникнуть ситуации с нестабильной работой. Примите это к сведению.
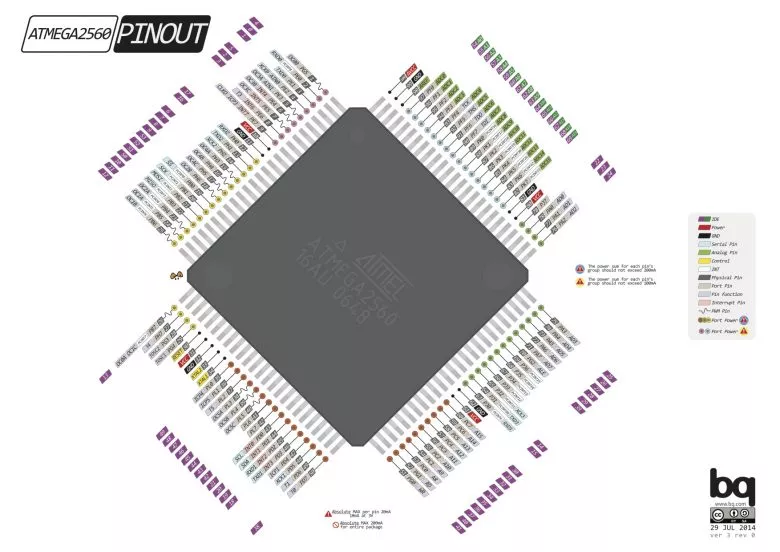
Распиновка процессора
Ниже диаграмма распиновка чипа, для увеличения — нажмите на изображение:
В качестве источника годятся, как сетевые AC/DC преобразователи, такие как для светодиодной ленты (12 В), например, отлично подойдут, так и батареи аккумуляторов или одна ячейка Li-ion аккумулятора с повышающим преобразователем до нужных значений напряжения.
Описание пинов платы
Микроконтроллер имеет 14 цифровых пинов, они могут быть использованы, как вход или выход. Из них 6 могут выдавать ШИМ-сигнал. Они нужны для регулировки мощности в нагрузке и других функций.
| Пин ардуино | Адресация в скетче | Специальное назначение | ШИМ |
|---|---|---|---|
| Цифровой пин 0 | RX | ||
| Цифровой пин 1 | 1 | TX | |
| Цифровой пин 2 | 2 | Вход для прерываний | |
| Цифровой пин 3 | 3 | Вход для прерываний | ШИМ |
| Цифровой пин 4 | 4 | ||
| Цифровой пин 5 | 5 | ШИМ | |
| Цифровой пин 6 | 6 | ШИМ | |
| Цифровой пин 7 | 7 | ||
| Цифровой пин 8 | 8 | ||
| Цифровой пин 9 | 9 | ШИМ | |
| Цифровой пин 10 | 10 | SPI (SS) | ШИМ |
| Цифровой пин 11 | 11 | SPI (MOSI) | ШИМ |
| Цифровой пин 12 | 12 | SPI (MISO) | |
| Цифровой пин 13 | 13 | SPI (SCK) К выходу дополнительно подсоединен встроенный светодиод |
Вызов ШИМ-сигнала осуществляется через команду AnalogWrite (номер ножки, значение от 0 до 255). Для работы с аналоговыми датчиками присутствует 6 аналоговых входов/выходов.
| Пин | Адресация в скетче | Специальное назначение |
|---|---|---|
| Аналоговый пин A0 | A0 или 14 | |
| Аналоговый пин A1 | A1 или 15 | |
| Аналоговый пин A2 | A2 или 16 | |
| Аналоговый пин A3 | A3 или 17 | |
| Аналоговый пин A4 | A4 или 18 | I2C (SCA) |
| Аналоговый пин A5 | A5 или 19 | I2C (SCL) |
Их тоже можно использовать, как цифровые.
Аналоговый сигнал обрабатывается 10 битным аналогово-цифровым преобразователем (АЦП), а при чтении микроконтроллер выдаёт численное значение от 0 до 1024. Это равно максимальному значению, которое можно записать в 10 битах. Каждый из выводов способен выдать постоянный ток до 40 мА.
Принципиальная схема платы выглядит так (нажмите для увеличения):
Подключение Arduino Shields
Для подключения шилда нужно просто аккуратно «надеть» его на основную плату. Обычно контакты шилда типа гребенки (папа) легко вставляются в разъемы платы ардуино. В некоторых случаях требуется аккуратно подправить штырки, если сама плата спаяна неаккуратно. Тут главное действовать аккуратно и не прилагаться излишней силы.
Как правило, шилд предназначен для вполне конкретной версии контроллера, хотя, например, многие шилды для Arduino Uno вполне нормально работают с платами Arduino Mega. Распиновка контактов на меге выполнена так, что первые 14 цифровых контактов и контакты с противоположной стороны платы совпадают с расположением контактов на UNO, поэтому в нее легко становится шилд от ардуино.
БИБЛИОТЕКА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ ARDUINO
Для подключения шаговых моторов к Arduino нужно использовать драйверы. Очень дешёвые и популярные моторы 28byj-48-5v часто продаются вместе со своим драйвером (транзисторная сборка ULN2003), подключить можно к любым 4-м пинам Ардуино и использовать.
Для работы с большими шаговиками (типа Nema 17) нужно использовать специализированные драйверы, ниже вы найдёте описания и схемы подключения для A4988, DRV8825 и TMC2208, драйверы такого формата подключаются и работают практически одинаково, т.к. разработаны для CNC шилдов и взаимозаменяемы. У этих драйверов нужно настроить ток при помощи крутилки на плате. Это можно сделать “на глаз”, заставив мотор вращаться и регулируя крутилку. Мотор должен вращаться, но не вибрировать как перфоратор и сильно не нагреваться. Лучше настроить ток по опорному напряжению Vref, у каждого драйвера оно считается по своей формуле (см. картинки ниже). Берём ток своего мотора из описания, подставляем в формулу вместо current, считаем, и накручиваем полученное напряжение крутилкой. Для измерения опорного напряжения нужно подключить щупы вольтметра к самой крутилке и пину GND.
Главное преимущество дорогущих драйверов TMC – отсутствие шума/свиста/вибраций при работе, так как драйвер своими силами интерполирует сигнал до микрошага 1/256.
Установка драйверов
Если вы использовали установщик, Windows — от XP до 10 — автоматически установит драйверы, как только вы подключите свою плату. Если вы загрузили и распаковали Zip архив или по какой-то причине плата неправильно распознана, выполните приведенную ниже процедуру.
- Нажмите на меню «Пуск» и откройте панель управления.
- Перейдите в раздел «Система и безопасность» (System and Security). Затем нажмите «Система» (System). Затем откройте диспетчер устройств (Device manager).
- Посмотрите под Порты (COM и LPT) (Ports (COM & LPT)). Вы должны увидеть открытый порт с именем «USB Serial Device». Если раздел COM и LPT отсутствует, просмотрите раздел «Другие устройства», «Неизвестное устройство».
- Щелкните правой кнопкой мыши по порту USB Serial Device и выберите опцию «Обновить драйверы…».
- Затем выберите опцию «Выполнить поиск драйверов на этом компьютере».
- Наконец, найдите файл драйвера с именем «arduino.inf», который находится в папке «Drivers» программы Arduino (а не подкаталог «FTDI USB Drivers»).
- После этого Windows завершит установку драйвера.
Как преодолеть аппаратные ограничения
Большинство распространённых плат имеют аналогичные характеристики, среди них:
- Uno;
- Nano;
- Pro mini;
- и подобные.
Но с развитием ваших навыков разработки в этой среде появляется проблема нехватки мощности и быстродействия этой платформы. Первым шагом для преодоления ограничений является использование языка C AVR.
С его помощью вы ускорите на порядок скорость обращения к портам, частоту ШИМ и размер кода. Если вам и этого недостаточно, то вы можете воспользоваться мощными моделями с аналогичным подходом к разработке. Для этого подойдёт плата Arduino Mega2560. Еще более мощная – модель Due. В противном случае вам стоит ознакомиться с разновидностями одноплатных компьютеров и STM микроконтроллеров.
Ардуино Uno R3 – отличная плата для большинства проектов, которая служит для изучения устройств цифровой электроники.
Плата Arduino Uno R3
Устройство построено на микроконтроллере АTmega16U2 и имеет повышенный уровень помехоустойчивости по цепи сброса.
Устройство отличается от предыдущей версии лишь тем, что в этом случае не используется интерфейс USB-UART FTDI при подключении к компьютеру. Эту задачу выполняет выполняет сам микроконтроллер ATmega 16U2.
Изменения распиновки платы выглядят следующим образом:
- Возле вывода AREF добавлены два пина: SDA, SCL.
- Возле пина RESET также добавлены два вывода: IOREF, позволяющий подключать платы расширения с подстройкой под необходимое напряжение; второй вывод не используется и находится в резерве.
Характеристики
В основе платы лежит процессор ATmega 328. Кроме него на плате находится модуль USB для связи с компьютером и прошивки. Этот модуль называется «USB-TTL преобразователь». На фирменных платах Arduino Uno для этой целей используется дополнительный микроконтроллер ATmega16U2.
| Характеристики | Arduino Uno R3 |
|---|---|
| Микроконтроллер | ATmega328 |
| Рабочее напряжение | 5В |
| Напряжение питания (рекомендуемое) | 7-12В |
| Напряжение питания (предельное) | 6-20В |
| Цифровые входы/выходы | 14 (из них 6 могут использоваться в качестве ШИМ-выходов) |
| Аналоговые входы | 6 |
| Максимальный ток одного вывода | 40 мА |
| Максимальный выходной ток вывода 3.3V | 50 мА |
| Flash-память | 32 КБ (ATmega328) из которых 0.5 КБ используются загрузчиком |
| SRAM | 2 КБ (ATmega328) |
| EEPROM | 1 КБ (ATmega328) |
| Тактовая частота | 16 МГц |
Особенность этого чипа заключается в аппаратной поддержке USB, что позволяет организовывать связь без дополнительных преобразователей. В то время как ATmega328 не поддерживает такой функции, поэтому 16u2 выступает в роли преобразователя данных из USB в последовательный порт для МК AVR. В него залита программа для выполнения этой задачи.
Однако так происходит не всегда: в более мелких платах, таких как Arduino Nano, используют преобразователи уровней на базе различных микросхем, например FT232, CP21XX, Ch340g и подобных. Это решение является более дешевым и не требует прошивки дополнительного связывающего контроллера, как описано выше.
Внимание! Не всё так однозначно с DCcduino UNO r3 на ch340g. В ней как раз и использован более дешевый, чем в оригинале, вариант преобразователя USB-TTL.. На плате есть выход 3.3 В, он нужен для подключения периферии и некоторых датчиков, его пропускная способность по току равна 50 мА
На плате есть выход 3.3 В, он нужен для подключения периферии и некоторых датчиков, его пропускная способность по току равна 50 мА.
ATmega328 работает на частоте 16 МГц. Она фиксирована кварцевым резонатором, который вы можете, по желанию, заменить, тем самым ускорив работу Uno r3.
Важно! После замены кварцевого резонатора функции, связанные со временем, такие как Delay, не будут соответствовать введенным значениям. Это функция задержки времени, по умолчанию её аргументом является требуемое время задержки в мс
Функция прописана в библиотеках Ардуино, с учетом стандартной тактовой частоты в 16 МГц. Поэтому после замены кварца заданное время не будет соответствовать написанному. Для этого нужно либо подбирать опытным путем и устанавливать зависимости, либо править файлы библиотек.
О плате
Ардуино Нано — это аналог Arduino Uno, которая также работает на чипе ATmega328P, но отличается формфактором платы, которая в 2-2,5 раза меньше, чем Уно (53 х 69 мм). Размеры подобны пачке сигарет, и позволяют легко собирать сложные схемы навесным монтажом, но после стадии создания макета идёт сборка действующих экземпляров, а для этого лучше подходит как раз Нано.
Размер Arduino Nano: 19 x 43 мм
Сравнение плат Arduino Uno и Arduino Nano
Отличие такой миниатюрной платы, заключается в отсутствии вынесенного гнезда для внешнего питания, но вместо него с легкостью можно подключиться напрямую к пинам. В плате используется чип FTDI FT232RL для USB-Serial преобразования и примененяется mini-USB кабель для связи с ардуино вместо стандартного. Связь с различными устройствами обеспечивают UART, I2C и SPI интерфейсы.
В остальном, способы взаимодействия и характеристики чипов совпадают с базовой моделью Уно, которая больше подходит для экспериментов, чем для реальных проектов. Нет более насущной проблемы для любителя электроники, чем желание красиво и компактно оформить своё устройство.
Платформа имеет контакты в виде пинов, поэтому ее легко устанавливать на макетную плату. Arduino Nano используется там где важна компактность, а возможностей Mini либо не хватает, либо не хочется заниматься пайкой.
Смотрите по теме: Индикатор уровня воды c помощью Arduino Nano
Похожие записи:
 Эквиваленты транзистора, динистора, тиристора, варикапа, замена деталей
Эквиваленты транзистора, динистора, тиристора, варикапа, замена деталей
 12 примеров расположения розеток на кухне — встроенные, выдвижные и угловые
12 примеров расположения розеток на кухне — встроенные, выдвижные и угловые
 Ангельские глазки: нюансы самостоятельной установки
Ангельские глазки: нюансы самостоятельной установки
 Сколько по времени нужно заряжать аккумулятор автомобиля?
Сколько по времени нужно заряжать аккумулятор автомобиля?
 Принцип работы электромагнитного клапана карбюратора
Принцип работы электромагнитного клапана карбюратора
 Действительно ли светодиодные лампы экономят ваши деньги. реальный расчет
Действительно ли светодиодные лампы экономят ваши деньги. реальный расчет