История.
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это – самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлова. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
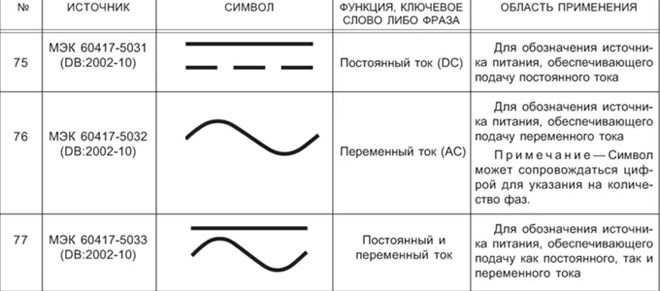
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
- Электродвигатели постоянного токаИспользуются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
- Электродвигатели переменного токаПользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
- Шаговые электродвигателиДействуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
- СерводвигателиОтносятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
- Линейные электродвигателиОбладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
- Синхронные двигателиЯвляются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
- Асинхронные двигателиТакже, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
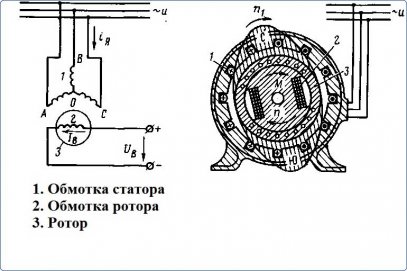
Иногда, в моей практике приходилось сталкиваться с одной проблемой, связанной с асинхронными электродвигателями — как определить количество оборотов ротора электродвигателя, если нет бирки и технической документации на электромотор?
Вопрос, на самом деле, решается просто — обороты можно определить по катушкам обмотки статора асинхронного электродвигателя.
Производители электродвигателей
- Российские производители электродвигателей
- Производители электродвигателей ближнего зарубежья
- Производители электродвигателей дальнего зарубежья
Российские производители электродвигателей
| Регион | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| АДКР | АДФР | СДОВ | СДПМ, серво | СРД, СГД | Шаговый | КДПТ ОВ | КДПТ ПМ | |||
| Краснодарский край | Армавирский электротехнический завод | |||||||||
| Свердловская область | Баранчинский электромеханический завод | |||||||||
| Владимир | Владимирский электромоторный завод | |||||||||
| Санкт-Петербург | ВНИТИ ЭМ | |||||||||
| Москва | ЗВИМосковский электромеханический завод имени Владимира Ильича | |||||||||
| Пермь | ИОЛЛА | |||||||||
| Республика Марий Эл | Красногорский завод “Электродвигатель” | |||||||||
| Воронеж | МЭЛ | |||||||||
| Новочеркасск | Новочеркасский электровозостроительный завод | |||||||||
| Санкт-Петербург | НПО “Электрические машины” | |||||||||
| Томская область | НПО Сибэлектромотор | |||||||||
| Новосибирск | НПО Элсиб | |||||||||
| Удмуртская республика | Сарапульский электрогенераторный завод | |||||||||
| Киров | Электромашиностроительный завод Лепсе | |||||||||
| Санкт-Петербург | Ленинградский электромашиностроительный завод | |||||||||
| Псков | Псковский электромашиностроительный завод | |||||||||
| Ярославль | Ярославский электромашиностроительный завод |
Производители электродвигателей дальнего зарубежья
| Страна | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| АДКР | АДФР | СДОВ | СДПМ, серво | СРД, СГД | Шаговый | КДПТ ОВ | КДПТ ПМ | |||
| Швейцария | ABB Limited | |||||||||
| США | Allied Motion Technologies Inc. | |||||||||
| США | Ametek Inc. | |||||||||
| США | Anaheim automation | |||||||||
| США | Arc System Inc. | |||||||||
| Германия | Baumueller | |||||||||
| Словения | Domel | |||||||||
| США | Emerson Electric Corporation | |||||||||
| США | General Electric | |||||||||
| США | Johnson Electric Holdings Limited | |||||||||
| Германия | Liebherr | |||||||||
| Швейцария | Maxon motor | |||||||||
| Япония | Nidec Corporation | |||||||||
| Германия | Nord | |||||||||
| США | Regal Beloit Corporation | |||||||||
| Германия | Rexroth Bosch Group | |||||||||
| Германия | Siemens AG | |||||||||
| Бразилия | WEG |
Библиографический список
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения. И.В.Савельев. Курс общей физики, том I. Механика, колебания и волны, молекулярная физика.-М.:Наука, 1970. ГОСТ 29322-92 (МЭК 38-83) Стандартные напряжения. ГОСТ 16264.0-85 Электродвигатели малой мощности А.И.Вольдек, В.В.Попов. Электрические машины. Машины переменного тока: Учебник для вузов.- СПб.: Питер, 2007. Paul Waide, Conrad U. Brunner. Energy-Efficiency Policy Opportunities for Electric Motor-Driven Systems. International Energy Agency Working Paper, Energy Efficiency Series.: Paris, 2011. Dr. J. Merwerth. The hybrid-synchronous machine of the new BMW i3 & i8 challenges with electric traction drives for vehicles. BMW Group, Workshop University Lund: Lund, 2014.
Гибридные конструкции
Сложность управления двигателями переменного тока подвигла инженеров-электриков на создание гибридных конструкций. Это так называемые синхронные машины, в которых ротор движется, не отставая от вращающегося магнитного поля.
Трехфазные синхронные машины
Статор состоит из трех обмоток со сдвигом в 120. На них подается трехфазное переменное напряжение. Ротор имеет несколько обмоток, но их концы выведены на токосъемный коллектор, поделенный диэлектрическими прокладками на сектора. Посредством графитовых щеток на него подается постоянное напряжение. Для постоянного магнита суммарный сдвиг фаз в 360 – это тот же ноль. Чтобы вал электродвигателя начал вращаться, его надо подтолкнуть – вручную, механическим (ДВС) или электрическим устройством. После набора номинальных оборотов инициирующее устройство останавливают. В итоге машина питается широко распространенным переменным, но имеет положительные свойства двигателя постоянного тока: стабильность оборотов, высокий КПД и, главное, возможность регулирования частоты вращения в широких пределах.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока. Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Рисунок 3. Ротор с тремя обмотками
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Работа двигателя заключается в том, что контроллер коммутирует определённое количество обмоток статора таким образом, что вектор магнитных полей ротора и статора ортогональны. При помощи ШИМ (широтно-импульсной модуляции) контроллер совершает управление протекающим через двигатель током и регулирует момент, оказывающий воздействие на ротор. Направление этого действующего момента определяет отметка угла между векторами. При расчётах используются электрические градусы.
В такой ситуации результирующий вектор сдвигается и становится неподвижным по отношению к потоку ротора, что, в свою очередь, создаёт необходимый момент на валу электродвигателя.
Применение асинхронных двигателей
Асинхронные в основном применяются в приводах крановых установок, в грузовых лебедках и других производственных устройствах, необходимых в производстве. К примеру, некоторые области применения асинхронных электродвигателей:
- рольганговые для производства рольгангов – роликовых конвейеров для перемещения несыпучих грузов.
- взрывозащищенные предназначены для работы во взрывоопасных средах химической, нефтеперерабатывающей, газовой и других областей промышленности.
- крановые в устройстве подъемных, поворотных и передвижных кранов.
Однофазные асинхронные электродвигатели широко применяются в бытовой технике.
Применение электродвигателей постоянного тока
Электродвигатели постоянного тока недолговечны из-за быстрого износа коллектора, однако они имеют лучшие пусковые и регулировочные свойства по сравнению с двигателями переменного тока.Этот тип двигателей применяется в приводах отличающихся высокой точностью, в которых необходимо плавное регулирование скорости вращения в широком диапазоне. В автомобилях, тракторах, самолетах с помощей двигателей постоянного тока приводится во вращение все вспомогательное оборудование.
Они задействованы в электроприводах подъемно-транспортных механизмов и механизмов экскаваторов, электрических стартерах автомобилей, тракторов и самосвалов, станков, прокатных станов, кранов, судовых установок. Миниатюрные низковольтные задействованы в производстве компьютерной техники, оргтехники, аккумуляторных электроинструментов и игрушек.
Компания Неринга-Сервис предлагает ремонт промышленных электродвигателей в Санкт-Петербурге! Обращайтесь прямо сейчас!
Особенности выбора электродвигателей
При выборе электродвигателей для конкретных целей необходимо учитывать:
– электромеханические параметры электродвигателей (номинальные напряжение и мощность, напряжение, продолжительность работы, частоту вращения и др.) и в первую очередь они должны соответствовать параметрам тех механизмов, в которых они будут использованы;
– если выбирается электродвигатель для механизмов, где не нужна регулировка частоты вращения, то обычно применяются синхронные или асинхронные электродвигатели с короткозамкнутым ротором. Для приводов механизмов, у которых тяжелые условия работы или пуска либо требуется изменение частоты вращения, необходимо выбирать двигатели с максимально возможно простыми методами пуска и регулирования частоты вращения для данной обстановки;
– для двигателей, работающих в сырых и влажных условиях, должна быть использована влагостойкая изоляция, рассчитанная на воздействие пыли и влаги, а исполнение двигателя должно быть не менее IP43;
– если планируется применение электродвигателя в местах с химически активными парами или газами, то такие двигатели должны иметь исполнение не менее IP44 или быть с подводом и продувом чистым воздухом;
– при выборе электродвигателя необходимо учитывать возможность его ремонта.
Виды электромеханических устройств
Статор — понятие и принцип действия
Используют ротор в таких электромеханических устройствах, как двигатели, работающие на постоянном и переменном электрическом токе, генераторы.
Агрегаты, работающие на переменном токе
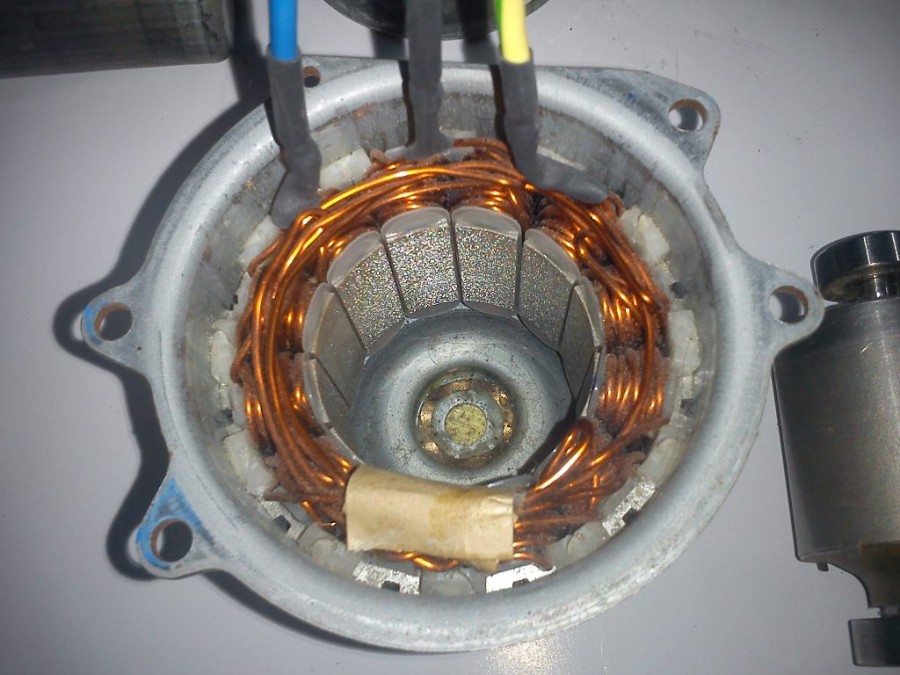
К таким агрегатам относятся различные электродвигатели. Наиболее распространенная модель данного устройства состоит из следующих частей:
- Алюминиевый или чугунный ребристый корпус с монтажной коробкой для подключения обмоток статора и ротора;
- Статор – неподвижная часть в виде полого цилиндра, расположенная внутри корпуса. Обмотка статора состоит из 3 пар расположенных друг напротив друга намотанных в пазы корпуса катушек из медного изолированного провода
- Цельнометаллический цилиндрический ротор с валом и пазами, в которые впаяны обладающие высокой токопроводящей способностью алюминиевые стержни.
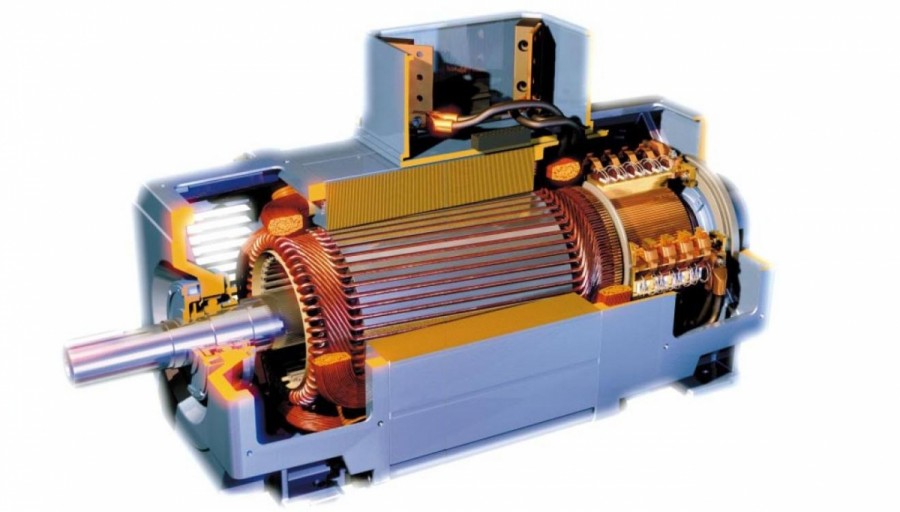
Двигатель, запитываемый от переменного тока
Вращается ротор на двух опорных подшипниках, запрессованных на его валу. Охлаждение работающего на больших оборотах электродвигателя происходит, благодаря крыльчатке – небольшому вентилятору, состоящему из множества лопастей и расположенному на одном из концов вала ротора. Также эффективному охлаждению работающего агрегата способствует ребристая структура алюминиевого корпуса.
Принцип работы подобного двигателя заключается в следующем:
- При подключении тока к агрегату он попеременно проходит через одну из трех пар катушек статора.
- При протекании по парам статорных катушек электрического тока они создают магнитное поле, силовые линии которого пересекают ротор.
- Попеременно запитываемые пары катушек создают подвижное магнитное поле, которое по закону электромагнитной индукции провоцирует появление в неподвижных металлических стержнях ротора электрического тока.
- Индуцированный ток в роторе приводит к появлению силы, выталкивающей его из магнитного поля статора. Так как частота подачи тока на катушки статора в среднем составляет порядка 30 импульсов в секунду, появившаяся в роторе выталкивающая сила приводит к его вращению с большой скоростью.
Важно! В зависимости от одновременности вращения ротора и порождающего это движение магнитного поля электрический двигатель переменного тока может быть синхронный (ротор агрегата вращается синхронно с магнитным полем статора) и асинхронный (вращение якоря не синхронизировано с движением магнитного поля статора). Первый вид отличается высокой мощностью и надежностью, в то время как второй характеризуется большим разнообразием конструкций и областей применения
Машины постоянного тока
Наиболее распространенный электродвигатель постоянного тока щеточного вида представляет собой электрический агрегат, состоящий из:
- Чугунного корпуса с ребрами охлаждения и специальным монтажным коробом для подключения обмоток агрегата;
- Вала из прочной инструментальной стали с двумя подшипниками;
- Якоря, состоящего из сердечника (набора пластин из специальной электротехнической стали), якорной обмотки (размещенных в пазах сердечника катушек из медного провода);
- Индуктора, состоящего из полюсов возбуждения с намотанными на них катушками из медного провода;
- Коллектора – расположенных на валу медных пластин, к которым подключаются выводы катушек якорной обмотки;
- Подпружиненных графитовых или металлографитовых щеток (щеточной группы).
Охлаждается такой двигатель, как и аналог, работающий от переменного тока, – расположенной на валу крыльчаткой.
Двигатель, работающий от постоянного тока
Важно! В отличие от электродвигателя переменного тока частотой вращения ротора в таком силовом агрегате управляет специальный блок, который при помощи установленного на валу датчика Холла определяет положение ротора и его скорость. Работает подобный агрегат следующим образом:
Работает подобный агрегат следующим образом:
- На обмотку возбуждения подается напряжение, создавая тем самым постоянное магнитное поле;
- Через щетки и коллектор напряжение подается на катушки сердечника якоря – возникающее при этом магнитное поле отталкивается от такого же, образованного индуктором, вследствие чего двигатель начинает вращаться («запускается»);
- Впоследствии при вращении через щетки запитываются остальные катушки якорной обмотки, что приводит к равномерному вращению якоря с определённой скоростью.
Останавливают вращение такого агрегата прекращением подачи напряжения на щеточную группу.
Помимо описанных выше электромоторов, к машинам, работающим на постоянном токе, относится также роторный стартер – устройство, необходимое для запуска бензиновых и дизельных автомобильных двигателей внутреннего сгорания.
Всыпные, шаблонные, стержневые обмотки
По технологии изготовления и конструктивным особенностям также различают шаблонные, стержневые и всыпные обмотки.
- Всыпные обмотки используются в статерах низковольтных электродвигателей; в зависимости от мощности применяются однослойные (до 7 кВт) или двухслойные (до 10 кВт) обмотки. Их использование характерно и для роторов мощностью до 100 кВт. Всыпные обмотки не имеют формы с точно установленными размерами. Такие обмотки всыпаются по одному проводнику (круглый изолированный провод) через узкие шлицы в полузакрытые пазы сердечников.
- Шаблонные, или жесткие обмотки производятся из прямоугольных или круглых проводов определенных размеров. Они формуются, при этом проводники изолируются общей изоляцией. Укладка происходит в открытые или полуоткрытые пазы. Использование данного вида обмоток характерно для статоров свыше 100 кВт и фазных роторов от 10 до 100 кВт.
- Применение стержневых обмоток характерно, в основном, для роторных машин с двигателями мощностью более 100 кВт.
В маломощных машинах постоянного тока (до 10 кВт) используются, в основном, всыпные якорные обмотки, укладываемые в полузакрытые пазы. Для якорей более мощных двигателей применяются многовитковые или одновитковые катушки с шаблонной обмоткой, для двигателей еще большей мощности используются стержневые обмотки с высокой электрической и механической прочностью и дополнительной витковой изоляцией. В процессе перемотки трансформаторов или электродвигателей, специалисты точно определяют тип обмотки для дальнейшей надлежащей работы.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Благодаря удобству передачи на большие расстояния и легкости преобразования переменный ток успешно стал стандартом электроснабжения.
В сфере же производства электродвигателей его способность возбуждать переменное магнитное поле в статоре и соответственно индуцировать ток в короткозамкнутой обмотке ротора позволила создать асинхронные электродвигатели. В этом типе двигателей единственным испытывающим трение узлом остаются коренные подшипники якоря.
Ротор такого электродвигателя – это металлический цилиндр, в пазы которого под углом к оси вращения запрессованы или залиты токопроводящие жилы, на торцах ротора объединенные кольцами в одно целое. Переменное магнитное поле статора возбуждает в роторе, напоминающем беличье колесо, противоток и, соответственно, отталкивающее его от статора магнитное поле.
В зависимости от числа обмоток статора асинхронный двигатель может быть:
Однофазным – в этом случае главным недостатком двигателя становится невозможность самостоятельного запуска, так как вектор силы отталкивания проходит строго через ось вращения.
Для начала работы двигателю необходим или стартовый толчок, или включение отдельной пусковой обмотки, создающей дополнительный момент силы, смещающий их суммарный вектор относительно оси якоря.
Двухфазный электродвигатель имеет две обмотки, в которых фазы смещены на угол, соответствующий геометрическому углу между обмотками. В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
Такой двигатель становится способным к самостоятельному запуску, однако имеет трудности с реверсом. Поскольку в современном электроснабжении не используются двухфазные сети, фактически электродвигатели этого рода применяются в однофазных сетях с включением второй фазы через фазовращающий элемент (обычно – конденсатор).
Трехфазный асинхронный электродвигатель – наиболее совершенный тип асинхронного мотора, так как в нем появляется возможность легкого реверса – изменение порядка включения фазных обмоток изменяет направление вращения магнитного поля, а соответственно и ротора.
Коллекторные двигатели переменного тока используются в тех случаях, когда требуется получение высоких частот вращения (асинхронные электродвигатели не могут превышать скорость вращения магнитного потока в статоре – для промышленной сети 50 Гц это 3000 об/мин).
Кроме того, они выигрывают в пусковом крутящем моменте (здесь он пропорционален току, а не оборотам) и имеют меньший пусковой ток, меньше перегружая электросеть при запуске. Также они позволяют легко управлять своими оборотами.
Обратной стороной этих достоинств становится дороговизна (требуется изготовление ротора с наборным сердечником, несколькими обмотками и коллектором, который к тому же сложнее балансировать) и меньший ресурс. Помимо необходимости в регулярной замене стирающихся щеток, со временем изнашивается и сам коллектор.
Синхронный электродвигатель имеет ту особенность, что магнитное поле ротора индуцируется не магнитным полем статора, а собственной намоткой, подключенной к отдельному источнику постоянного тока.
Благодаря этому частота его вращения равна частоте вращения магнитного поля статора, откуда и происходит сам термин «синхронный».
Как и двигатель постоянного тока, синхронный двигатель переменного тока является обратимым:
- при подаче напряжения на статор он работает как электродвигатель;
- при вращении от внешнего источника он сам начинает возбуждать в фазных обмотках переменный ток.
Основная область использования синхронных электродвигателей – высокомощные приводы. Здесь увеличение КПД относительно асинхронных электромоторов означает значительное снижение потерь электроэнергии.
Также синхронные двигатели используются в электротранспорте. Однако, для управления скоростью в этом случае требуются мощные частотные преобразователи, зато при торможении возможен возврат энергии в сеть.
Ремонт
Ремонтные работы всего устройства выполняются с целью восстановления его функциональности и работоспособности. Иногда требуется замена некоторых деталей. Например, при нагреве статора по разным причинам, может образоваться нагар на конструкции якоря электродвигателя.

Последовательность шагов тогда следующая:
- демонтаж двигателя;
- очистные работы;
- разборка всех узлов;
- восстановление поврежденных частей;
- покраска;
- сборка двигателя и проверка его в нагрузочном режиме.

Если стержень имеет трещины, то он подлежит восстановлению или замене. Делается это так: на месте трещины проводится надрез и высверливание отверстий от точки этого надреза до торца замыкающего кольца. Та часть, которая оказалась высверленной, заполняется медным сплавом.

Не стоит забывать и о проверке двигателя на обрыв и короткое замыкание. Сопротивление ротора и статора проверяются при помощи омметра, сверяясь при этом с техническими характеристиками в инструкции по эксплуатации. Однако прибор должен быть крайне чувствителен ввиду стремления сопротивления к нулю в обмотках мощных моделей моторов.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Похожие записи:
 Синусоидальный ток и его основные параметры
Синусоидальный ток и его основные параметры
 Лампы для растений: какие бывают и для чего нужны
Лампы для растений: какие бывают и для чего нужны
 Все, что нужно знать о подсвечивании рассады: чем, когда и нужно ли досвечивать сеянцы
Все, что нужно знать о подсвечивании рассады: чем, когда и нужно ли досвечивать сеянцы
 Какое напряжение в электрической сети компьютерного класса
Какое напряжение в электрической сети компьютерного класса
 Как штробить стены под проводку болгаркой своими руками без пыли
Как штробить стены под проводку болгаркой своими руками без пыли
 Определение направления вектора магнитной индукции с помощью правила буравчика и правила правой руки
Определение направления вектора магнитной индукции с помощью правила буравчика и правила правой руки