Введение. Понятие ШИМ
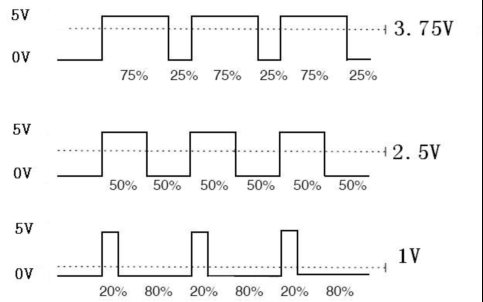
Широко-импульсная модуляция (сокращенно ШИП) — это техника, используемая для преобразования аналогового сигнала в цифровой. Ведь компьютер не может выдавать аналоговый сигнал: выходы цифровой техники могут принимать только одно из двух значений – например, 0V или 5V. Поэтому используется счетчик высокой точности для кодирования аналогового сигнала в ШИМ-сигнал, которые – уже цифровой, поскольку в любой момент времени он принимает значение либо 5V (ВКЛ), либо 0V (ВЫКЛ). Напряжение подается на аналоговую нагрузку (например, светодиод, или сервопривод) в виде повторяющейся последовательности ВКЛ и ВЫКЛ. Получаемое выходное напряжение вычисляется по продолжительности сигналов ВКЛ и ВЫКЛ, по следующей формуле: Выходное напряжение = (Время ВКЛ / время импульса) * максимальное напряжение.
Взгляните на рисунок ниже для лучшего понимания.
ШИМ имеет множество применений, например:
- регулирование яркость свечения ламп,
- скорости вращения мотора,
- генерация звука и т.д.
ШИМ имеет 3 параметра:
Период
Скважность
Величина
У Ардуино 6 портов, поддерживающие ШИМ: это цифровые пины 3, 5, 6, 9, 10 и 11.
В предыдущем примере мы подключили LED к цифровому пину. Теперь мы будем менять его яркость с помощью ШИМ-сигнала.
История
Некоторым машинам (например, двигателю швейной машины ) требуется частичная или регулируемая мощность. В прошлом управление (например, ножной педалью швейной машины) реализовывалось с помощью реостата, подключенного последовательно с двигателем, чтобы регулировать количество тока, протекающего через двигатель. Это была неэффективная схема, так как это также тратило впустую мощность в виде тепла в резистивном элементе реостата, но терпимо, потому что общая мощность была низкой. Хотя реостат был одним из нескольких методов управления мощностью (см. Автотрансформаторы и Variac для получения дополнительной информации), дешевый и эффективный метод переключения / регулировки мощности еще не был найден. Этот механизм также должен был иметь возможность приводить в действие двигатели для вентиляторов, насосов и роботизированных сервоприводов и должен был быть достаточно компактным, чтобы взаимодействовать с регуляторами яркости ламп. ШИМ возник как решение этой сложной проблемы.
Одно из первых применений ШИМ было в Sinclair X10, аудиоусилителе мощностью 10 Вт, доступном в виде комплекта в 1960-х годах. Примерно в то же время ШИМ начал использоваться в управлении двигателями переменного тока.
Следует отметить, что в течение примерно столетия некоторые электродвигатели с регулируемой скоростью имели приличный КПД, но они были несколько более сложными, чем электродвигатели с постоянной скоростью, и иногда требовали громоздких внешних электрических устройств, таких как группа резисторов с регулируемой мощностью или вращающиеся преобразователи. например, диск Уорда Леонарда .
Практический тест — Уменьшается ли мерцание с DC dimming?
У AMOLED дисплеев частота ШИМ зачастую лежит в пределах 200 — 250 Гц на всех уровнях яркости до 99%.
Первый вывод, к которому мы пришли, изучая показатели на осциллографе — эффект от применения DC dimming действительно есть. Амплитуда сигнала становится намного более плоской, частоте варьируется гораздо меньше. Уже только за счет данной особенности нагрузка на глаза кардинально снижается.
Результат OnePlus 7 Pro еще более интересен. При 50% яркости мерцания нет вообще, а появляется оно лишь на низкой яркости. У Xiaomi Black Shark 2 все немного по другому: частота мерцания принудительно ограничивается до 60 Гц на всем диапазоне яркости.
От коэффициента заполнения к аналоговому напряжению
Номинальное напряжение ЦАП, наблюдаемое на выходе фильтра нижних частот, определяется только двумя параметрами: коэффициентом заполнения и напряжением высокого логического уровня ШИМ сигнала; на схеме это напряжение высокого логического уровня обозначено буквой A как «амплитуда». Связь между коэффициентом заполнения, амплитудой и номинальным напряжением ЦАП довольно интуитивно понятна: в частотной области фильтр нижних частот подавляет высокочастотные составляющие входного сигнала. Эквивалентом этого эффекта во временной области является сглаживание или усреднение – таким образом, посредством фильтрации нижних частот ШИМ сигнала мы извлекаем его среднее значение. Предположим, что коэффициент заполнения составляет 50% (т.е. длительность активного состояния равна длительности неактивного состояния), и мы работаем с логикой 3,3 В. Вы, вероятно, можете догадаться, какое будет номинальное напряжение ЦАП: 1,65 В, потому что сигнал половину своего времени равен 3,3 В и половину 0 В, и, таким образом, сглаженная версия окажется прямо посередине. Мы можем обобщить это следующим образом:
\
Что такое ШИМ?
Для получения на выходе сигнала требуемой формы силовой ключ должен открываться всего лишь на определенное время, пропорциональное вычисленным показателям выходного напряжения. В этом и заключается принцип широтно-импульсной модуляции (ШИМ, PWM). Далее сигнал такой формы, состоящий из импульсов, разнящихся по своей ширине, поступает в область фильтра на основе дросселя и конденсатора. После преобразования на выходе будет практически идеальный сигнал требуемой формы.
Область применения ШИМ не ограничивается импульсными стабилизаторами и преобразователями напряжения. Использование данного принципа при проектировании мощного усилителя звуковой частоты дает возможность существенно снизить потребление устройством электроэнергии, приводит к миниатюризации схемы и оптимизирует систему теплоотдачи. К недостаткам можно причислить посредственное качество сигнала на выходе.
Причины и области применения ШИМ
Принцип широтно-импульсной модуляции используется в регуляторах частоты вращения мощных асинхронных двигателей. В этом случае модулирующий сигнал регулируемой частоты (однофазный или трехфазный) формируется маломощным генератором синусоиды и накладывается на несущую аналоговым способом. На выходе получается ШИМ-сигнал, который подается на ключи потребной мощности. Дальше можно пропустить получившуюся последовательность импульсов через фильтр низкой частоты, например через простую RC-цепочку, и выделить исходную синусоиду. Или можно обойтись без нее – фильтрация произойдет естественным образом за счёт инерции двигателя. Очевидно, что чем выше частота несущей, тем больше форма выходного сигнала близка к исходной синусоиде.
Возникает естественный вопрос – а почему нельзя усилить сигнал генератора сразу, например, применением мощных транзисторов? Потому что регулирующий элемент, работающий в линейном режиме, будет перераспределять мощность между нагрузкой и ключом. При этом на ключевом элементе впустую рассеивается значительная мощность. Если же мощный регулирующий элемент работает в ключевом режиме (тринистор, симистор, RGBT-транзистор), то мощность распределяется во времени. Потери будут намного ниже, а КПД – намного выше.
В цифровой технике особой альтернативы широтно-импульсному регулированию нет. Амплитуда сигнала там постоянна, менять напряжение и ток можно лишь промодулировав несущую по ширине импульса и впоследствии усреднив её. Поэтому ШИМ применяют для регулирования напряжения и тока на тех объектах, которые могут усреднять импульсный сигнал. Усреднение происходит разными способами:
- За счет инерции нагрузки. Так, тепловая инерция термоэлектронагревателей и ламп накаливания позволяет объектам регулирования заметно не остывать в паузах между импульсами.
- За счёт инерции восприятия. Светодиод успевает погаснуть от импульса к импульсу, но человеческий глаз этого не замечает и воспринимает как постоянное свечение с различной интенсивностью. На этом принципе построено управление яркостью точек LED-мониторов. Но незаметное мигание с частотой несколько сот герц все же присутствует и служит причиной усталости глаз.
- За счет механической инерции. Это свойство используется при управлении коллекторными двигателями постоянного тока. При правильно выбранной частоте регулирования двигатель не успевает затормозиться в бестоковых паузах.
Поэтому ШИМ применяют там, где решающую роль играет среднее значение напряжения или тока. Кроме упомянутых распространенных случаев, методом PWM регулируют средний ток в сварочных аппаратах и зарядных устройствах для аккумуляторных батарей и т.д.
Если естественное усреднение невозможно, во многих случаях эту роль на себя может взять уже упомянутый фильтр низкой частоты (ФНЧ) в виде RC-цепочки. Для практических целей этого достаточно, но надо понимать, что без искажений выделить исходный сигнал из ШИМ с помощью ФНЧ невозможно. Ведь спектр PWM содержит бесконечно большое количество гармоник, которые неизбежно попадут в полосу пропускания фильтра. Поэтому не стоит строить иллюзий по поводу формы восстановленной синусоиды.
Очень эффективно и эффектно управление методом ШИМ RGB-светодиодом. Этот прибор имеет три p-n перехода – красный, синий, зеленый. Изменяя раздельно яркость свечения каждого канала, можно получить практически любой цвет свечения LED (за исключением чистого белого). Возможности по созданию световых эффектов с помощью PWM безграничны.
Наиболее употребительная сфера применения цифрового сигнала, промодулированного по длительности импульса – регулирование среднего тока или напряжения, протекающего через нагрузку. Но возможно и нестандартное использование этого вида модуляции. Все зависит от фантазии разработчика.
Что такое импульсный блок питания и где применяется
Что такое аттенюатор, принцип его работы и где применяется
Что такое частотный преобразователь, основные виды и какой принцип работы
Преобразователи напряжения с 12 на 220 вольт
Что такое диодный мост, принцип его работы и схема подключения
Что такое триггер, для чего он нужен, их классификация и принцип работы
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
https://youtube.com/watch?v=6OPdstU6MP4
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства
Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления
Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Как сделать ШИМ блок питания (контроллер)
Как вы уже поняли, сердцем ШИМ контроллера будет мультивибратор или модулятор. Мультивибратор можно сделать даже на двух транзисторах, в виде самого рядового мультивибратора. А модулятор можно сделать на базе микроконтроллера. Чаще всего применяются именно микроконтроллеры. После остается лишь преобразовать низкий сигнал в управляющий силовой. Скажем с помощью транзистора. Пример для светодиода.
Если наша нагрузка имеет индуктивную составляющую, то транзистор защищается с помощью диода, который подключается параллельно нагрузке.
Это вроде того, как диод используется при управлении транзистором реле. В данном случае обмотка двигателя также может выдать высокий ток, который будет теперь идти не только через транзистор, но и через диод. О конкретных примерах БП ШИМ можно узнать из статьи «Драйвер для светодиодов».
Как проверить ШИМ-контроллер
Есть несколько способов как сделать проверку ШИМ-контроллера. Можно, конечно это сделать без мультиметра, но зачем так мучаться, если можно воспользоваться нормальным прибором.
Прежде, чем проверять работу ШИМ-контроллера, необходимо выполнить базовую диагностику самого блока питания. Она выполняется так:
Шаг 1. Внимательно осмотреть в выключенном состоянии сам источник питания, в котором установлен PWM. В частности надо тщательно осмотреть электролитические конденсаторы на предмет вздутости.
Шаг 2. Провести проверку предохранителя и элементов входного фильтра блока питания на исправность.
Шаг 3. Провести проверку на короткое замыкание или обрыв диодов выпрямительного моста. Прозвонить их можно не выпаивая из платы. При этом надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором. Если есть на это подозрение, то всё таки придётся выпаивать элементы и проверять уже по отдельности.
Шаг 4. Провести проверку исправностм выходных цепей, а именно электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов, диодных сборок и т.п.
Шаг 5. Провести проверку силовых транзисторов высокочастотного преобразователя и транзисторов каскада управления. При этом в обязательном порядке проверьте возвратные диоды, которые включенны параллельно электродам коллектор-эмиттер силовых транзисторов.
Проверка ШИМ-контроллера — видео инструкции:
https://youtube.com/watch?v=igS7mn50x2Q
https://youtube.com/watch?v=2jn4sYBS9Nw
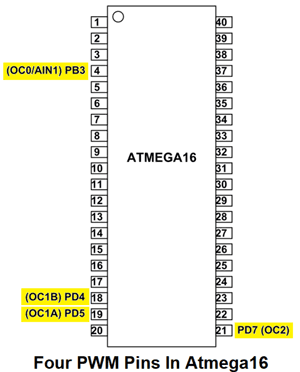
Контакты ШИМ в микроконтроллере AVR ATmega16
Микроконтроллер Atmega16 имеет 4 контакта для использования ШИМ модуляции — PB3(OC0), PD4(OC1B), PD5(OC1A), PD7(OC2). Более наглядно они представлены на следующем рисунке.
Также ATmega16 имеет два 8-битных (Timer0 и Timer2) и один 16-битный таймер (Timer1). Для понимания принципов формирования ШИМ мы должны понимать основы работы с этими таймерами. Как известно, частота представляет собой количество циклов в секунду поэтому она однозначно связано зависимостью с временем. То есть чем более высокая частота нам нужна, тем более быстрый таймер мы должны использовать. Чем выше частота ШИМ, тем более точно мы можем управлять ее параметрами.
В данной статье для управления ШИМ в микроконтроллере ATmega16 мы будем использовать его Timer2
С его помощью можно выбрать коэффициент заполнения/скважность (duty cycle) ШИМ в широких пределах. Кратко рассмотрим основы этого процесса
ШИМ – основы
Вы, наверное, уже знаете, что такое широтно-импульсная модуляция; тем не менее, мы кратко рассмотрим основные концепции, чтобы убедиться, что у нас есть прочная основа, когда будем рассматривать, как именно фильтр нижних частот превращает цифровой сигнал в программируемое аналоговое напряжение.
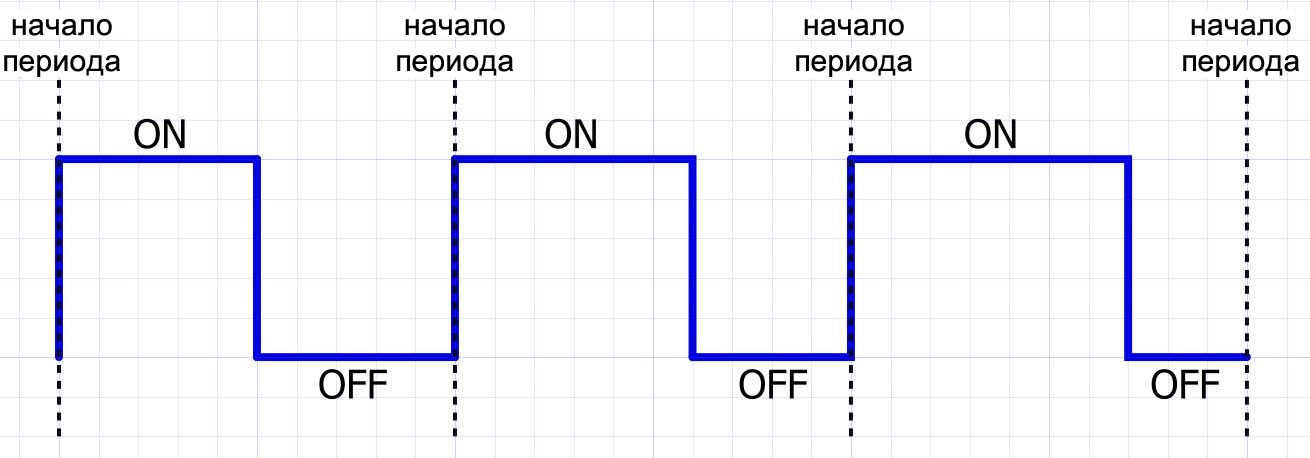 Рисунок 1 – ШИМ сигнал
Рисунок 1 – ШИМ сигнал
Типовой цифровой тактовый сигнал представляет собой последовательность периодов, в которых длительность напряжения высокого логического уровня равна длительности напряжения низкого логического уровня. ШИМ сигнал, напротив, представляет собой последовательность периодов, в которых длительность напряжения высокого логического (или низкого логического) уровня изменяется в зависимости от внешних условий, и эти изменения могут использоваться для передачи информации. Если вы знакомы с радиочастотными схемами, вы знаете, что информация передается с помощью синусоидальных сигналов, к которым применяется некоторый тип модуляции. Эта ситуация аналогична работе ШИМ – вместо амплитудной или частотной модуляции мы имеем широтно-импульсную модуляцию. Возможно, вам будет полезно подумать об этом концептуальном сходстве: мы все знаем, что аналоговый аудиосигнал может быть передан от антенны до радиоприемника для чего, несущая сначала модулируется, а затем полученный сигнал обрабатывается таким образом, чтобы устранить несущую и восстановить оригинальную аудиоинформацию. Аналогично, мы можем генерировать программируемое аналоговое напряжение путем широтно-импульсной модуляции цифровой несущей и затем «передавать» этот модулированный сигнал на фильтр нижних частот.
На приведенной выше диаграмме высокий логический уровень обозначен как «ON» (включен) или активное состояние, а низкий логический уровень обозначен «OFF» (выключен) или неактивное состояние. В первом периоде продолжительность активного состояния равна продолжительности неактивного состояния. Затем в течение следующих двух периодов длительность активного состояния увеличивается на ширину одной клетки; это означает, что длительность неактивного состояния должна уменьшиться на ширину одной клетки, потому что несущая частота ШИМ (и, следовательно, период ШИМ) постоянна
В контексте нашего ЦАП на базе ШИМ нам не нужно знать абсолютное значение длительности активного и неактивного состояния; важно соотношение между этими длительностями, то есть коэффициент заполнения ШИМ сигнала:
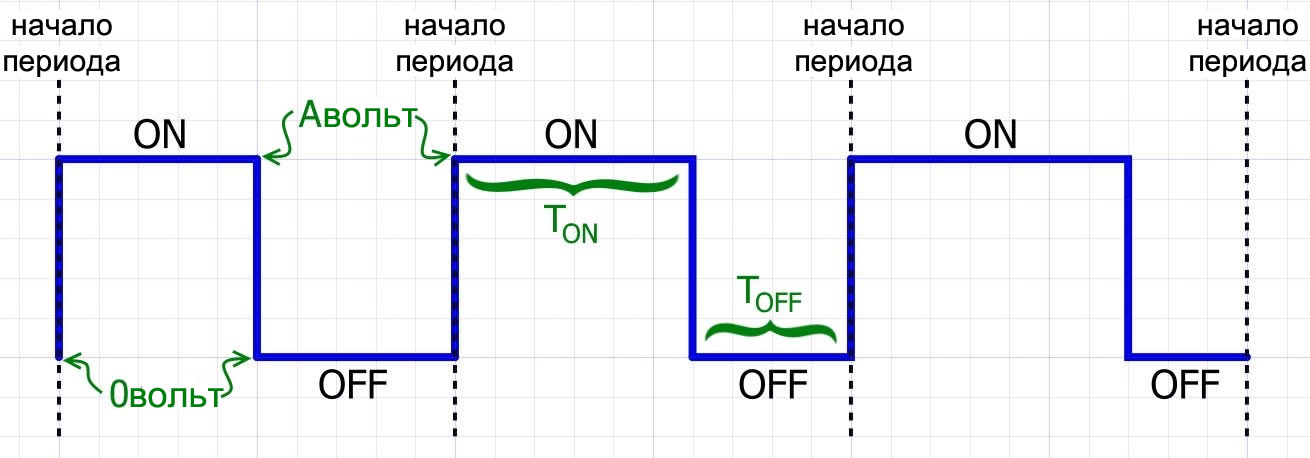 Рисунок 2 – ШИМ сигнал
Рисунок 2 – ШИМ сигнал
\
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T. D = t/T. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения
S = T/t.
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Похожие записи:
 Как подключить микросхему тда 7384
Транзистор кт803а
Как подключить микросхему тда 7384
Транзистор кт803а
 На сколько времени хватает аккумулятора: практические расчеты
На сколько времени хватает аккумулятора: практические расчеты
 2n2222 транзистор характеристики и его российские аналоги
2n2222 транзистор характеристики и его российские аналоги
 Реле времени механическое
Реле времени механическое
 Что потребуется для самостоятельной установки инфракрасных обогревателей: способы монтажа, советы, правила
Что потребуется для самостоятельной установки инфракрасных обогревателей: способы монтажа, советы, правила