ПУСК ЭЛЕКТРОДВИГАТЕЛЯ ЧЕРЕЗ ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ
Наиболее гибкий способ управления не только режимом пуска, но и рабочими характеристиками асинхронного электродвигателя – это применение частотного преобразователя. По своей сути частотный преобразователь представляет собой узкоспециализированный инвертор:
- входное напряжение в нем выпрямляется;
- затем заново преобразуется в переменное, но уже с заданной частотой и амплитудой.
Это происходит благодаря работе генератора широтно-импульсной модуляции (ШИМ), который создает серию прямоугольных импульсов заданной частоты и скважности (отношения длительности импульса к его периоду). Генерируемые импульсы управляют силовыми ключами, коммутирующими выпрямленное напряжение питания на обмотки выходного трансформатора.. Как осуществляется плавный пуск через частотный преобразователь?
Как осуществляется плавный пуск через частотный преобразователь?
В данном случае становится возможным плавное изменение не только напряжения, но и частоты питающего электродвигатель напряжения. Благодаря тому, что ШИМ-генератор частотного преобразователя легко может управляться с обратной связью по потребляемому току, становится возможным пусковой режим, в котором ток не превышает номинальный – таким образом перегрузка питающей сети фактически отсутствует.
Однако такой пусковой режим требует значительного усложнения частотного преобразователя, поэтому для управления асинхронными электродвигателями обычно используется комбинация с отдельным устройством плавного пуска (УПП).
2012-2021 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника
Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.
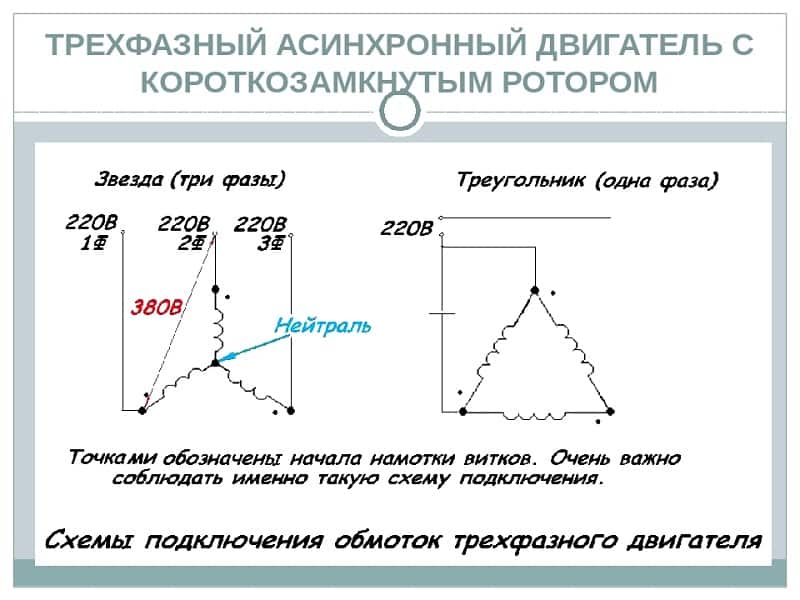
Рис. 4. Схемы подключения
Для подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы. Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
Рис. 5. Примеры схем подключений в однофазную сеть
С целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.
Источник
Как определить мощность и частоту оборотов электродвигателя
Возникла необходимость узнать мощность или частоту оборотов вала и другие параметры электродвигателя, но после внимательного осмотра на его корпусе не нашлось таблички (шылдика) с его наименованием и техническими параметрами. Придется определять самому, для этого есть несколько способов и мы их рассмотрим ниже.
Мощность электродвигателя представляет из себя скорость преобразования электрической энергии, ее принято определять в ваттах.
Чтоб осознать, как это работает, нам понадобится 2 величины: сила тока и напряжение.
Сила тока — численность тока, которое проходит через поперечное сечение за некий отрезок времени, ее принято определять в амперах.
Обратите внимание
Напряжение — значение, равная работе по перемещению заряда меж 2-мя точками цепи, ее принято определять в вольтах.
Для расчета мощности используется формула N = A/t, где:
N – мощность;
А – работа;
t – время.
Часто электродвигатель поступает с завода с уже указанными техническими параметрами. Но заявленная мощность не всегда соответствует фактической, а скорее всего она может значить лишь максимальную мощность электропотока.
Так что если на вашем электроинструменте указана, например, мощность в 500 ват, это совсем не значит что инструмент будит потреблять точно 500 ват.
Электродвигатели производят стандартной дискретной мощности, линейки типа 1.5, 2.2, 4 кВт.
Помимо этого он сможет определить количество оборотов двигателя по размеру статора, количеству пар полюсов и диаметра вала.
Еще более опытным в этом деле окажется обмотчик, специалист который занимается перемоткой электродвигателей со 100%-ой уверенностью определит технические параметры вашего электродвигателя.
Если табличка с характеристиками двигателя потеряна для подсчета мощности двигателя нужно измерить силу тока на обмотках ротора и с помощью стандартной формулы найти потребляемую мощность электродвигателя.
Определение мощности по току. Для этого подключаем двигатель в сеть и контролируем напряжение. Затем поочередно, в цепь каждой из обмоток статора включаем амперметр и замеряем потребляемый ток. После того как мы нашли суму потребляемых токов, полученное число необходимо умножить на фиксированное напряжение в результате получим число определяющее мощность электродвигателя в ваттах.
Определяем мощность по габаритам. Нужно измерить диаметр сердечника (с внутренней стороны) и его длину.
Дальше если знаем частоту сети нужно узнать синхронную частоту вращения вала.
Умножаем синхронную частоту вращения вала на диаметр сердечника (в сантиметрах) полученную цифру умножаем на 3.14 затем разделяем на частоту сети умноженную на 120. Полученное значение мощности будит в киловаттах.
Замер по счетчику. Способ считается самым простым. Для этого, для чистоты эксперимента, отключаем все нагрузки в доме.
Важно
Дальше необходимо включить двигатель на определенное время (например 10 минут) На щетчике будит видно разницу в киловаттах по ней уже легко можно высчитать сколько киловаттах потребляет двигатель.
Удобней всего будит воспользоваться портативным электросчетчиком который показывает потребление в киловаттах (ваттах) в режиме реального времени.
Для определения реального показателя мощности, которую выдает двигатель, необходимо найти скорость валового вращения, измеряемую в числе оборотов за секунду, тяговое усилие двигателя.
Частота вращения умножается последовательно на 6,28, показатель силы и радиус вала, который можно вычислить при помощи штангенциркуля. Найденное значение мощности выражается в ваттах.
Определяем рабочее количество оборотов двигателя.
Самый быстрый способ – посчитать количество катушек (катушечных групп)Определяем мощность по расчетным таблицам. С помощью штангенциркуля замеряем диаметр вала, длину мотора (без выступающего вала) и расстояние до оси.Замеряем вылет вала и его выступающую часть, диаметр фланца если он есть, а также расстояние крепежных отверстий.По этим данным с помощью сводной таблицы можно легко определить мощность двигателя и другие характеристики
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
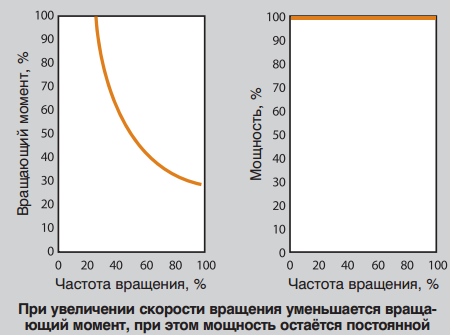
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
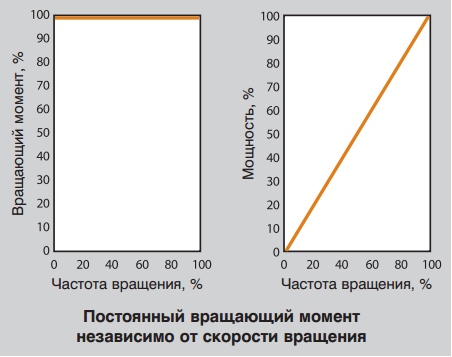
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
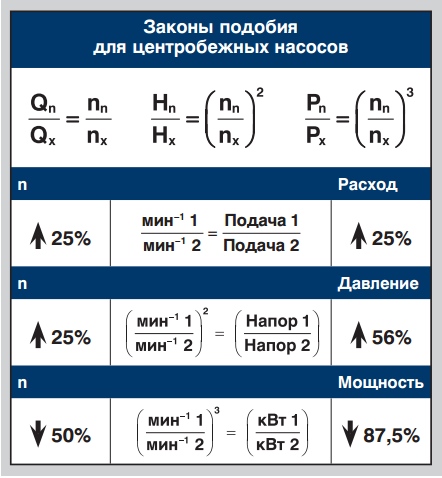
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
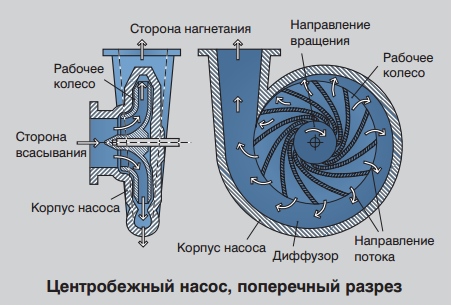
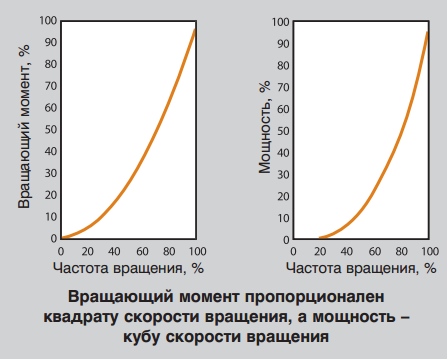
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
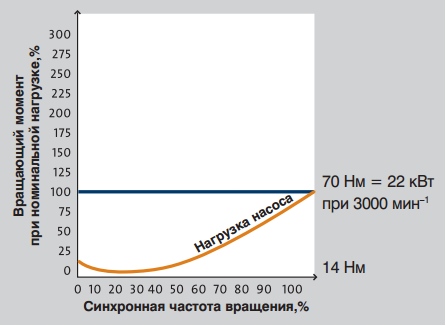
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Методы увеличения Мпуск
Из формулы видно, от чего зависит пусковой момент асинхронного двигателя и как увеличить его, изменяя параметры. Он зависит от мощности трехфазного двигателя и величины скольжения.
Мощность определяется по формуле, корень из 3 умноженный на напряжение и ток. Скольжение изменяет свое значение в зависимости от оборотов вала механизма. При оборотах двигателя равных нулю, скольжение принимает значение равное 1.
При разгоне электродвигателя оно уменьшается и стремится к нулю при достижении номинальных оборотов ротора. Для того чтобы увеличить пусковой момент, достаточно увеличить пусковой ток или питающее напряжение. Величину скольжения изменить нельзя.
Для примера приведем расчет пускового момента, используя паспортные данные некоторых двигателей. Результат сведен в нижеприведенную таблицу:
При этом следует помнить, что использование электродвигателя в механизмах с пусковым моментом, превышающим усилие двигателя на валу – недопустимо. В этом случае электродвигатель не сможет преодолеть потери в двигателе и тормозной момент механизма. Он просто выйдет из строя. Т.е. усилие электродвигателя недостаточно для нормальной работы устройства.
Способы возбуждения синхронных генераторов
Самым распространенным способом создания основного магнитного потока синхронных генераторов является электромагнитное возбуждение, состоящее в том, что на полюсах ротора располагают обмотку возбуждения, при прохождении по которой постоянного тока, возникает МДС, создающая в генераторе магнитное поле. До последнего времени для питания обмотки возбуждения применялись преимущественно специальные генераторы постоянного тока независимого возбуждения, называемые возбудителями В (рис. 1.3, а). Обмотка возбуждения (ОВ ) получает питание от другого генератора (параллельного возбуждения), называемого подвозбудителем (ПВ ). Ротор синхронного генератора, возбудителя и подвозбудителя располагаются на общем валу и вращаются одновременно. При этом ток в обмотку возбуждения синхронного генератора поступает через контактные кольца и щётки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителяr 1 и подвозбудителяr 2 . В синхронных генераторах средней и большой мощности процесс регулирования тока возбуждения автоматизируют.
В синхронных генераторах получила применение также бесконтактная система электромагнитного возбуждения, при которой синхронный генератор не имеет контактных колец на роторе. В качестве возбудителя в этом случае применяют обращенный синхронный генератор переменного тока В
(рис. 1.3, б). Трехфазная обмотка2 возбудителя, в которой наводится переменная ЭДС, расположена на роторе и вращается вместе с обмоткой возбуждения синхронного генератора и их электрическое соединение осуществляется через вращающийся выпрямитель3 непосредственно, без контактных колец и щёток. Питание постоянным током обмотки возбуждения1 возбудителя В осуществляется от подвозбудителяПВ – генератора постоянного тока. Отсутствие скользящих контактов в цепи возбуждения синхронного генератора позволяет повысить её эксплуатационную надёжность и увеличить КПД.
В синхронных генераторах, в этом числе гидрогенераторах, получил распространение принцип самовозбуждения (рис. 1.4, а), когда энергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающий трансформатор и выпрямительный полупроводниковый преобразователь ПП
преобразуется в энергию постоянного тока. Принцип самовозбуждения основан на том, что первоначальное возбуждение генератора происходит за счёт остаточного магнетизма машины.
На рис. 1.4, б представлена структурная схема автоматической системы самовозбуждения синхронного генератора (СГ
) с выпрямительным трансформатором (ВТ ) и тиристорным преобразователем (ТП ), через которые электроэнергия переменного тока из цепи статораСГ после преобразования в постоянный ток подаётся в обмотку возбуждения. Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбужденияАРВ , на вход которого поступают сигналы напряжения на входеСГ (через трансформатор напряженияТН ) и тока нагрузкиСГ (от трансформатора токаТТ ). Схема содержит блок защиты (БЗ ), обеспечивающий защиту обмотки возбуждения (ОВ ) от перенапряжения и токовой перегрузки.
Мощность, затрачиваемая на возбуждение, обычно составляет от 0,2 до 5 % полезной мощности (меньшее значение относится к генераторам большой мощности). В генераторах малой мощности находит применение принцип возбуждения постоянными магнитами, расположенными на роторе машины. Такой способ возбуждения даёт возможность избавить генератор от обмотки возбуждения. В результате конструкция генератора существенно упрощается, становится более экономичной и надёжной. Однако, из-за высокой стоимости материалов для изготовления постоянных магнитов с большим запасом магнитной энергии и сложности их обработки применение возбуждения постоянными магнитами ограничено машинами мощностью не более нескольких киловатт.
Синхронные генераторы
составляют основу электроэнергетики, так как практически вся электроэнергия во всём мире вырабатывается посредством синхронных турбо- или гидрогенераторов.
Так же синхронные генераторы находят широкое применение в составе стационарных и передвижных электроустановок или станций в комплекте с дизельными и бензиновыми двигателями.
Виды электромеханических устройств
Статор — понятие и принцип действия
Используют ротор в таких электромеханических устройствах, как двигатели, работающие на постоянном и переменном электрическом токе, генераторы.
Агрегаты, работающие на переменном токе
К таким агрегатам относятся различные электродвигатели. Наиболее распространенная модель данного устройства состоит из следующих частей:
- Алюминиевый или чугунный ребристый корпус с монтажной коробкой для подключения обмоток статора и ротора;
- Статор – неподвижная часть в виде полого цилиндра, расположенная внутри корпуса. Обмотка статора состоит из 3 пар расположенных друг напротив друга намотанных в пазы корпуса катушек из медного изолированного провода
- Цельнометаллический цилиндрический ротор с валом и пазами, в которые впаяны обладающие высокой токопроводящей способностью алюминиевые стержни.
Двигатель, запитываемый от переменного тока
Вращается ротор на двух опорных подшипниках, запрессованных на его валу. Охлаждение работающего на больших оборотах электродвигателя происходит, благодаря крыльчатке – небольшому вентилятору, состоящему из множества лопастей и расположенному на одном из концов вала ротора. Также эффективному охлаждению работающего агрегата способствует ребристая структура алюминиевого корпуса.
Принцип работы подобного двигателя заключается в следующем:
- При подключении тока к агрегату он попеременно проходит через одну из трех пар катушек статора.
- При протекании по парам статорных катушек электрического тока они создают магнитное поле, силовые линии которого пересекают ротор.
- Попеременно запитываемые пары катушек создают подвижное магнитное поле, которое по закону электромагнитной индукции провоцирует появление в неподвижных металлических стержнях ротора электрического тока.
- Индуцированный ток в роторе приводит к появлению силы, выталкивающей его из магнитного поля статора. Так как частота подачи тока на катушки статора в среднем составляет порядка 30 импульсов в секунду, появившаяся в роторе выталкивающая сила приводит к его вращению с большой скоростью.
Важно! В зависимости от одновременности вращения ротора и порождающего это движение магнитного поля электрический двигатель переменного тока может быть синхронный (ротор агрегата вращается синхронно с магнитным полем статора) и асинхронный (вращение якоря не синхронизировано с движением магнитного поля статора). Первый вид отличается высокой мощностью и надежностью, в то время как второй характеризуется большим разнообразием конструкций и областей применения
Машины постоянного тока
Наиболее распространенный электродвигатель постоянного тока щеточного вида представляет собой электрический агрегат, состоящий из:
- Чугунного корпуса с ребрами охлаждения и специальным монтажным коробом для подключения обмоток агрегата;
- Вала из прочной инструментальной стали с двумя подшипниками;
- Якоря, состоящего из сердечника (набора пластин из специальной электротехнической стали), якорной обмотки (размещенных в пазах сердечника катушек из медного провода);
- Индуктора, состоящего из полюсов возбуждения с намотанными на них катушками из медного провода;
- Коллектора – расположенных на валу медных пластин, к которым подключаются выводы катушек якорной обмотки;
- Подпружиненных графитовых или металлографитовых щеток (щеточной группы).
Охлаждается такой двигатель, как и аналог, работающий от переменного тока, – расположенной на валу крыльчаткой.
Двигатель, работающий от постоянного тока
Важно! В отличие от электродвигателя переменного тока частотой вращения ротора в таком силовом агрегате управляет специальный блок, который при помощи установленного на валу датчика Холла определяет положение ротора и его скорость. Работает подобный агрегат следующим образом:
Работает подобный агрегат следующим образом:
- На обмотку возбуждения подается напряжение, создавая тем самым постоянное магнитное поле;
- Через щетки и коллектор напряжение подается на катушки сердечника якоря – возникающее при этом магнитное поле отталкивается от такого же, образованного индуктором, вследствие чего двигатель начинает вращаться («запускается»);
- Впоследствии при вращении через щетки запитываются остальные катушки якорной обмотки, что приводит к равномерному вращению якоря с определённой скоростью.
Останавливают вращение такого агрегата прекращением подачи напряжения на щеточную группу.
Помимо описанных выше электромоторов, к машинам, работающим на постоянном токе, относится также роторный стартер – устройство, необходимое для запуска бензиновых и дизельных автомобильных двигателей внутреннего сгорания.
Прямой пуск
Это наиболее популярный способ включения асинхронного электрического двигателя. Требуется всего одно действие – включение мотора в электросеть на зафиксированной частоте и номинальном напряжении тока. После прямого запуска электромотор начинает набирать обороты с высокой скоростью. Главное достоинство этой схемы – выгода с экономической точки зрения. Прямой пуск можно выполнять без использования иных устройств, на установку которых нужны дополнительные средства. Есть у этого типа запуска и недостатки.
Прямой пуск подходит исключительно для маломощных моторов, т. к. их пусковые токи не настолько большие, как у более мощных собратьев (моторов, приводов и т.д.). Тем не менее, даже эти токи оказывают большую нагрузку на электрическую сеть, ведь они могут в 10 и более раз превышать номинальные, что негативно сказывается на кабелях, питающих мотор, и на электросети в целом. Высокие токи плохо влияют и на обмотку самого мотора
Высокий пусковой момент
Высокий пусковой момент при малом входном получается при пусковой клетке с большим сопротивлением, а небольшой пусковой и высокий входной моменты — при малом активном и большом реактивном сопротивлениях.
Необходимость обеспечения высоких пусковых моментов для нормальной работы ряда приводов привела к довольно широкому распространению асинхронных двигателей с роторами, имеющими двойную беличью клетку со вставными стержнями, или фигурные пазы, залитые алюминием.
Если не требуется высокий пусковой момент, то за счет увеличения сопротивления реостата пусковой ток может быть снижен в большей мере.
ГЦН приводит к чрезмерно высоким пусковым моментам, которые уже не могут быть преодолены приводным электродвигателем обычной конструкции. Поэтому с помощью конструктивных мероприятий стараются понизить величину пускового момента. Это достигается, например, путем впрыска под высоким давлением масла между несущими колодками и пятой и обеспечения за счет этого необходимой для легкого пуска Смазочной пленки. Применяется также гидравлическая или электромагнитная разгрузка.
Еще лучшие характеристики ( высокий пусковой момент и возможность регулирования скоростей) можно получить, применяя шунтовые двигатели постоянного тока или коллекторные двигатели переменного тока. Однако значительно большая их стоимость, необходимость в более квалифицированном обслуживании, меньшая надежность работы этих двигателей в условиях химических производств, необходимость постоянного тока ( для шунтовых двигателей) препятствуют их широкому применению для центрифуг.
Кроме того, они отличаются относительно высоким пусковым моментом.
|
Схема пластинчатого пневмомотора. |
Достоинствами пневмодвигателя являются высокая приемистость; высокий пусковой момент; малая масса, приходящаяся на единицу мощности; взрывобезопасность.
Для вращения печей используют электродвигатели с высоким пусковым моментом и числом оборотов в 1 33 раза большим, чем максимально необходимое при проведении процесса. Для печей с переменным по длине диаметром установочная мощность рассчитывается отдельно для каждого диаметра и затем суммируется. Вспомогательные двигатели должны обеспечивать вращение печи в случае аварии. В этих целях применяют бензиновые двигатели или дизели.
При необходимости плавного запуска электродвигателя и сохранения сравнительно высокого пускового момента используют асинхронные двигатели с фазной обмоткой ротора и контактными кольцами. Пуск такого двигателя осуществляют с помощью реостата, сопротивления которого в момент пуска вводят в цепь обмотки ротора.
|
Привод вращательного движения. |
Для сдвига арматуры с конечного положения часто требуется особо высокий пусковой момент. Это обеспечивается специальными двигателями. Для защиты обмотки предусмотрены три термореле. Включенные в устройство управления они защищают двигатель ( например, приперегруз-ке или стопорении ротора) от недопустимо высоких температур. Термореле прерывают токовую цепь, как только превышается максимально допустимая температура обмотки 140 С. Внутреннее подключение двигателя осуществляют через штекерное соединение в корпусе редуктора.
|
Характеристики электродвигателей NEMA. |
Как видно из рисунка, электродвигатели конструкции С имеют довольно высокий пусковой момент и низкий пусковой ток. Скоростные характеристики их жестки: варьирование нагрузки очень мало изменяет скорость вращения вала электродвигателя.
|
Схема вентильного привода-с бесконтактным возбудителем. |




