Что такое шаговый двигатель?
Прежде чем перейти к статье, давайте сразу договоримся, что статья не направлена на специалистов, а её цель – донести любознательным любителям техники и технологий о таком устройстве, как шаговый двигатель и об основах работы с ними. Поэтому умников и критиков, жаждущих поговорить о великом многообразии управляемого и регулируемого электропривода, прошу идти общаться на тематические ресурсы по ЧПУ-станкам и 3D-принтерам.
Формулировка достаточно понятна, но её последнее предложение может вызвать некоторое недопонимание. Поэтому я предлагаю провести небольшое сравнение.
Всем известно что ротор «обычного» электродвигателя, будь то асинхронного, синхронного, коллекторного или любого другого будет вращаться до тех пор, пока на него подают напряжение питания, и после отключения питания он будет вращаться еще какое-то время по инерции, если же не используются какие-либо средства для его торможения.
Ротор такого двигателя вращается просто вокруг своей оси без каких-либо ограничений, на 360 градусов, и остановится он в любом месте. Зафиксировать его положением можно только механически (тормозом). По этой причине не получится добиться точного позиционирования исполнительных механизмов, что требуется в робототехнике, ЧПУ-станках и другом автоматизированном оборудовании.
Но шаговые двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол.
Питание такого двигателя невозможно без системы управления, или как его еще называют, драйвера — он подаёт импульсы в нужные обмотки, чтобы повернуть ротор на нужный угол. Это наглядно иллюстрирует приведенная ниже анимация.
Кроме того, что можно поворачивать двигатель на определенный угол и фиксировать его в этом положении, делать это всё можно без схемы обратной связи (датчиков положения и прочего).
Рассматривать типы шаговых двигателей в пределах этой статьи мы не будем, лишь кратко перечислим, какими они бывают. По конструкции:
2. С постоянными магнитами.
По способу питания:
- Униполярные (однополярные — ток пропускают через обмотки только в одну сторону).
- Биполярные (ток пропускают через обмотки в обе стороны). Здесь драйвер должен подавать напряжение различной полярности, что несколько усложняет схемотехнику. При тех же размерах развивают бОльшую мощность по сравнению с униполярными.
В униполярном двигателе зачастую 5 проводов — 1 общий, от середины каждой из двух обмоток, и 4 от концов обмоток. Иногда говорят «4 обмотки» — это также правильно, поскольку фактически мы получаем 4 обмотки соединенных в общей точки.
Также ШД могут отличаться и по количеству проводов, это зависит от того, как соединены обмотки и какое питание предполагается, некоторые варианты вы видите в таблице ниже.
Управление шаговым двигателем
Различают два способа управления шаговым двигателем:
1. Полношаговое . Одновременно включается только пара обмоток (без перекрытия с другими). Достигается максимальный момент на валу, но точность установления угла меньше, чем в других способах.
2. Полушаговое . В этом случае увеличивается количество шагов, соответственно повышается точность установки положения вала. На каждый первый шаг включается одна обмотка, на каждый второй шагами (полушаг) – пара обмоток. Но когда включена одна обмотка момент на валу снижается вдвое.
На анимациях ниже наглядно продемонстрировано
В некоторых источниках отдельно обозначают микрошаговое управление. Используется, когда необходимо максимальное количество шагов и точность управления. По способу управления оно похоже на полушаговый режим, между шагами включаются две обмотки, а отличие в том, что токи в них распределяются не равномерно. Главный недостаток такого подхода — усложняется коммутация (система управления).
Микросхема К155ЛА3 и электронные самоделки на ней
Микросхема К155ЛА3,содержит четыре логических элемента 2И-НЕ,напряжение питания 5В,напряжение высокого уровня на выходе одного из элемента не ниже 2.4В,низкого уровня не более 0.4В.(на фото к55ла3,это полный аналог к155ла3,подходит по выводам и улучшенный)
Каждый элемент содержит четыре транзистора.VT1-двухэмиттерный транзистор,это транзистор входа,VT2-усиление,VT3-VT4 являются выходными транзисторами,каждый пропускает сигнал в своей фазе.Если VT3 открыт,то VT4 будет закрыт и наоборот.
Как работает микросхема.Высокий уровень-это единица и это соответствует напряжению от 2.4В и выше.Низкий уровень-это ноль,соответствует напряжению нескольких сотен милливольт.При подаче питания на микросхему 5В,на входах микросхемы вольтметр покажет высокий уровень примерно 3.5В,на выходах будет низкий уровень сотни или десятки мВ,так проверяют эту микросхему.
Если хоть на одном из входов элемента будет низкий уровень(вывод 1 или 2 подключен к минусу питания),то на выходе всегда будет высокий уровень или единица.Если на два входа подать высокий уровень,то на выходе будет низкий уровень или ноль.Инвертор-это когда на входе единица,а на выходе будет ноль и наоборот.
На двух элементах можно собрать простой генератор прямоугольных импульсов или мигалку.При подаче питания,на выводе 3 будет высокий уровень,а это значит,что на выводе 6 будет низкий уровень.Конденсатор С1 начнет заряжаться через резистор R1.Как только напряжение на конденсаторе достигнет пороговой величины,элемент DD1.1 инвертирует сигнал, на выводе 3 теперь будет ноль,а на выводе 6 будет единица.Конденсатор начнет разряжаться и вновь на выводе 3 появится единица и все будет повторяться.Светодиод будет мигать,частота вспышек зависит от емкости С1 и резистора R1.
На трех элементах можно собрать генератор прямоугольного сигнала на частоты десятки и сотни кГц,на частотах примерно 20-40МГц на выходе генератора будет синус.Генератор можно промодулировать звуком,надо на выводы 1-2 подать сигнал с плеера,тогда на FM приемнике можно будет поймать свой сигнал,но такой передатчик сгодится лишь для эксперимента.
Прерывистый звуковой генератор можно собрать на четырех элементах.На элементах DD1.3-DD1.4 собран звуковой генератор,на DD1.1-DD1.2 собран включатель-выключатель этого генератора.
Простая музыкальная игрушка.Звуковой генератор,тональность которого можно изменять резисторами разного сопротивления.Нажимая кнопку,подключаем резистор и генератор издает однотональный сигнал определенной частоты,на другую кнопку-сигнал другой частоты.Разных резисторов на разные номиналы должно быть штук десять,столько и кнопок.
Управление шаговым двигателем с реверсом на микросхемах серии к155.
С помощью простого устройства выполненного на микросхемах серии к155,можно управлять или проверять униполярный шаговый двигатель,изменять его частоту вращения с функцией реверса.
На микросхеме к155ла3 выполнен генератор,частоту которого можно изменять переменным резистором и соответственно обороты двигателя.Сигнал с буферного каскада на DD2.4 поступает на вход микросхемы к155тм2. На ней реализован кольцевой двухразрядный счетчик,который вырабатывает четыре сигнала сдвинутые по фазе для управления шаговым двигателем.Эти сигналы поступают на транзисторные ключи,которые реализованы на микросхеме к1109кт23,ее полный аналог ULN2003.Эти ключи коммутируют обмотки двигателя.На микросхеме к155лп5 собран инвертор счетчика,который при нажатии кнопки SA1 изменяет направление вращения двигателя(вправо-влево).
Шаговый двигатель применил из старого флоппи дисковода.Желтый вывод подключен к плюсу питания,остальные четыре к выходам ключей.
При емкости конденсатора С1 470мкФ,двигатель будет вращаться медленно небольшими шагами.При емкости в 10мкФ,вращение будет уже быстрее.
На фото представлены осциллограммы сигнала с различных точек.Если нет осциллографа,эти сигналы можно услышать динамиком.Один вывод динамика подключен к плюсу питания,а другой через электролитический конденсатор подключают к точкам.Из динамика будет слышен сигнал с определенной частотой и мощностью звука.
По фото видно,что сигнал с генератора частотой 409.8 Гц счетчик поделил на четыре.Теперь частота каждого из четырех сигналов с выхода счетчика составляет 102.4 Гц
Драйвер шагового двигателя для станка с ЧПУ
Вот довольно таки простой драйвер ШД для самодельного станка с ЧПУ на 3 оси + управление питанием шпинделя. Сам такой собрал, прост в сборке, не требует прошивки. Микросхемы использовал SN74LS75. Стабилизатор 78L05 не использовал, т.к. запитал микросхемы (и сам драйвер) от компьютерного БП (самый оптимальный вариант). При сборке не повторите мою ошибку, под транзисторы обязательно нужна изоляционная тепло-отводная прокладка! А то я замкнул все транзисторы на радиатор и долго не мог понять почему оно не работает… Позже я вовсе убрал радиатор, так как с двигателями типа ПБМГ-200-265 транзисторы не греются совсем.
Разводка печатной платы:
Микросхемы которые можно применить в драйвере:
- К555ТМ7
- К155ТМ7
- КР1533ТМ7
- SN74ALS75 (аналог КР1533ТМ7)
- SN74LS75 (аналог К555ТМ7)
- SN7475 (аналог К155ТМ7)
Datasheet (Даташит) к зарубежным аналогам (SN74ALS75, SN74LS75, SN7475): SN74LS75_datasheet.zip (220кб)
Скачать печатную плату в формате SprintLayout: UR3VCD_V2.0 (34кб)
Позже будет видео, и статья о самом станке.
Применение шаговых двигателей. Простые схемы
Шаговые двигателя в настоящее время широко применяются в качестве приводов в принтерах, сканерах, DVD-проигрывателях и многих других . В случае выхода из строя такого прибора, из него можно извлечь некоторые полезные узлы и, если они работоспособны, использовать по другому подходящему назначению. Статья предназначена для любителей делать что-нибудь своими руками и не претендует на оригинальность, но содержит некоторые сведения, которые могут быть полезны.
Во-первых, все эти приборы имеют в своём составе блок питания, как правило — импульсный, на несколько напряжений. В основном это выходы с постоянными напряжениями +5, +12 и +24 … 36 вольт с токами до 2 … 3 ампер. Такие блоки питания можно использовать, например, для зарядных устройств, питания светодиодных лент или электроинструмента небольшой мощности. Но в данной статье будут даны примеры использования шаговых двигателей из подобных аппаратов.
Для питания и управления шаговым двигателем, конечно, требуется специальная схема-драйвер, это обеспечит его полную функциональность. Но если вам нужен «просто двигатель» без управления частотой вращения и шагом поворота вала, то вполне можно обойтись простейшей схемой питания с применением конденсатора:
— эта схема предполагает использование двигателей с двумя обмотками и отводами от их середины (всего 6 проводов). Обмотка 1 имеет выводы красного и белого цвета, обмотка 2 — синего и жёлтого. Средние выводы (коричневого цвета) здесь не используются. В зависимости от напряжения питания и мощности двигателя может потребоваться подбор элементов С* и R*.
При использовании такой схемы нельзя будет менять частоту (скорость) вращения, но можно менять его направление — при помощи переключателя S1. Вместо трансформатора и выпрямительного моста в схеме можно использовать как раз «родной» блок питания, который стоял в аппаратуре, где использовался этот двигатель.
Другой вариант использования шагового двигателя — в качестве генератора. При вращении вала такого двигателя на его обмотках наводится напряжение, которое можно использовать, например, для питания низковольтной лампы или светодиодов. В интернете можно найти множество схем-вариантов автономных фонариков с использованием шагового двигателя в качестве генератора энергии. Ниже приводятся их простейшие примеры :
При использовании ламп вместо светодиодов (маломощных на 3 . 12 вольт) их можно подключать к обмоткам напрямую, без использования выпрямителей.
Для увеличения мощности такого фонарика можно использовать все имеющиеся в нём обмотки, используя суммирование их мощностей на выходе (параллельное включение):
Конденсатор на выходе служит для сглаживания колебаний напряжения при неравномерной скорости вращения вала двигателя. Также на выходе можно включить аккумулятор (например от сотового телефона), который будет подзаряжаться при вращении вала двигателя . А вращать вал можно любым удобным и подходящим способом — с помощью надетого на него шкива с ручкой, привода от ветряной или гидро-«вертушки» и т. д…
В статье приведён минимум необходимой информации и простейшие примеры. Более сложные схемы включения с реализацией всех возможностей шаговых двигателей ( с возможностью полноценного управления) можно найти на специализированных сайтах в интернете или справочной литературе.
Благодарю за уделённое время.
Прошу поставить «палец-вверх», если статья была полезна
УКАЗАНИЯ ПО ЭКСПЛУАТАЦИИ
6.1. Запрещается подведение каких-либо
электрических сигналов (в том числе шин «питание» и «земля») к выводам
микросхем, не используемым согласно принципиальной электрической схеме.
6.2. При ремонте аппаратуры замену микросхем
необходимо производить при отключенных источниках питания.
6.3. Крепление микросхем к печатной плате в
аппаратуре производится методом припайки выводов. Расстояние от основания
корпуса до места пайки должно быть не менее 1,5 мм.
6.4. При монтаже аппаратуры необходимо
руководствоваться черт. 1.
6.5. После монтажа микросхемы должны быть
защищены от непосредственного воздействия влаги.
6.6. С целью повышения надежности рекомендуется
принимать меры, обеспечивающие минимальную температуру нагрева корпуса
микросхем и защиту от воздействия климатических факторов.
Такими мерами являются:
обеспечение работы микросхем в номинальных электрических и
температурных режимах;
улучшение вентиляции, рациональное размещение микросхем в
блоках, применение теплоотводящих панелей и экранов, заливка компаундами.
6.7. При работе с микросхемами необходимо
предусматривать меры защиты от воздействия статического электричества.
6.8. При определении потребителем на входном
контроле соответствия микросхем нормам стандарта испытания должны проводиться в
режимах и по методикам, указанным в настоящем стандарте.
На входном контроле у потребителей микросхемы не должны
подвергаться испытаниям на устойчивость к смене температур, ударной тряске,
удару и другим испытаниям.
6.9. Значения нагрузочной способности
микросхем приведены в табл. 10.
Таблица 10
|
Управляющая микросхема |
Микросхемы — нагрузки |
||
|
К155ЛА2, К155ЛА3 |
Вход установки 1, |
Вход установки С (K155TM2) |
|
|
К155ЛА2 К155ЛА3 К155ТМ2 |
10 |
5 |
3 |
6.10. Микросхемы должны использоваться в облегченных
условиях и режимах работы по сравнению с предельно допустимыми. Работа
микросхем в предельно допустимых условиях и режимах должна быть исключена как в
процессе изготовления, настройки, испытаний аппаратуры, так и в процессе ее
эксплуатации.
6.11. Недопустим отбор микросхем по
каким-либо параметрам и характеристикам с целью применения только лучших по
параметрам образцов.
6.12. Значения напряжений UIH³ 2 В и UIL£ 0,8 В гарантируются совокупностью
параметров Uoh³2,4 B,UOI
£ 0,4
В и величиной помехоустойчивости не менее 0,4 В.
6.13. Свободные входы микросхемы, не
используемые согласно электрической схеме аппаратуры, должны быть подключены к
источнику напряжения 5 В ± 5 % через резистор с сопротивлением не менее 1 кОм.
Одновременно подключается до 20 входов.
Если допускается увеличение значений динамических
параметров, обеспечивается отсутствие наводок на свободные входы, которые могут
снизить помехоустойчивость, и исключаются случайные электрические воздействия
на эти выводы, то допускается свободные входы оставлять незадействованными.
6.14. При монтаже микросхем в аппаратуру
усилие в направлении оси вывода не должно превышать 1 Н на один вывод и 5 Н на
группу выводов.
Допустимое количество изгибов выводов в соответствии с черт.
1 не
должно превышать 2.
6.15. Микросхемы в блоках аппаратуры
покрывают влагозащитными лаками, обеспечивающими лучшую работоспособность
микросхем в условиях повышенной влажности.
6.16. Для микросхем типа К155ТМ2 гарантируется
работоспособность на тактовой частоте до 15 МГц включительно.
6.17. В процессе эксплуатации допускается
воздействие следующих механических факторов:
синусоидальная вибрация в диапазоне частот от 10 до 2000 Гц
при максимальном ускорении 98 м/с2;
ускорение (постоянный режим) 490 м/с2.
Таблица истинности
Что такое таблица истинности? Это специальный набор данных, который описывает логическую функцию. Что под ней понимают? В данном случае имеют в виду функцию, в которой значения параметров и её самой выражают логическую истинность. В качестве примера очень к месту будет вспомнить двузначную логику, где можно дать только два определения: ложь или истина. В качестве заменителей, когда говорят о компьютерных технологиях, часто вводят понятие 0 или 1. Причем использование данного инструментария оказалось удобным не только с позиции логики, но и при изображении в табличном варианте. Особенно часто их можно встретить в булевой алгебре или аналогичных системах логики. Но хватит информации, давайте посмотрим, как выглядит таблица JK-триггера.
ИНФОРМАЦИОННОЕ ПРИЛОЖЕНИЕ 5
СПРАВОЧНЫЕ ДАННЫЕ
1. Зависимости UOH,UOL,IOS,
IIL,IIH,tPHL,tPLH= f
(t °С),tPHL,tPLH =
f (С∑H) для микросхем К155ЛА2 приведены на черт. 25
— 27, 29
— 34.
2. Зависимости UOH,UOL, Ios,
IIL,IIH, tPHL, tPLH = f (t
°С)tPHL, tPLH= f (С∑H), ICCL,
ICCHдля микросхем
К155ЛА3 приведены на черт. 25
— 27, 29
— 36.
3. Зависимости UOH, UOL, Ios, Iss=
F (f),tpHL, tPLH =
f (t °C)tpHL, tPLH=f
(C∑H)для микросхем К155ТМ2 приведены на черт. 25
— 28, 37
— 40.
4. Ожидаемая интенсивность отказов при
эксплуатации в ЭВМ 1 ∙ 10-7 1/ч.
5. Типовое значение тактовой частоты для
микросхем К155ТМ2 20 МГц.
6. Типовые значения динамических
параметров:
время задержки распространения сигнала при включении tPHL, нc:
К155ЛА2 11;
К155ЛА3 7;
К155ТМ2 20;
время задержки распространения сигнала при выключении tPLH, нc:
К155ЛА2 13;
К155ЛА3 12;
К155ТМ2 15.
График зависимости UOH = f (t °C)для микросхем типов К155ЛА2, К155ЛА3,
К155ТМ2
Uсс = 5,25В; UIL
= 0,40 В; N = 10
Черт. 28
График зависимости UOL= f (t °C)для микросхем типов
К155ЛА2, К155ЛА3, К155ТМ2
Uсс= 5,25В; UIH= 2,40 В; N = 10
Черт. 29
График зависимости IOSf
(t °C) для микросхем типов
К155ЛА2, К155ЛА3, К155ТМ2 при Ucc
= 5,25
Черт. 30
График зависимости ICC=
F (f)для микросхем
типа К155ТМ2 при Uсс
= 5,25
Черт. 31
График зависимости IIL
= f (t °C)для микросхем типов
К155ЛА2, К155ЛА3
Ucc= 5,25 В; UIL = 0,40 В
Черт. 32
График зависимости IIH= f (t °C)для микросхем типов
К155ЛА2, К155ЛА3
Uсс = 5,25 В; UIH= 2,40 В
Черт. 33
График зависимости tPHL
= f (t °C)для
микросхем типов К155ЛА2, К155ЛА3 при Ucc= 5,0 В, С∑H = 15 пФ, N = 10
Черт. 34
График
зависимости tPLH=
f (t °C)для микросхем типов К155ЛА2, К155ЛА3 при Uсс = 5,0 В, С∑H = 15 пФ, N = 10
Черт.
35
График
зависимости tPHL= f (С∑H)
для микросхем типов К155ЛА2, К155ЛА3 при UCC= 5,0 В, N =
10, t = 293 К (20 °C)
Черт. 36
График зависимости tPLH= f
(C∑H)для микросхем типов К155ЛА2, К155ЛА3 при Uсс=
5,0 В, N =10,t
= 293 K
(20 °C)
Черт. 37
График зависимости ICCL
= f (t °C)для
микросхем типа К155ЛА3 при Uсс= 5,25 В
Черт. 38
График
зависимости ICCL = f
(t °C)для микросхем типа К155ЛА3 при Ucc= 5,25 В
Черт. 39
График зависимости tPHL
= f (t °C)для
микросхем типа К155ТМ2 при
Uсс=
5,0 В, N =10, C∑H = 15 пФ
Черт. 40
График зависимости tPLH=
f (t °C)для микросхем
типа К155ТМ2 при Uсс
= 5,0 В, N = 10, С∑H
= 15 пФ
Черт. 41
График зависимости tPHL = f
(С∑H)для микросхем типа К155ТМ2 при Ucc=
5,0В,
N = 10, t
= 293 K
(20 °C)
Черт. 42
График зависимости tPLH= f
(С∑H)для микросхем типа К155ТМ2 при UCC = 5,0 В, N = 10, t
= 293 К (20 °С)
Черт. 43
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. Автор — делегация СССР в Постоянной
Комиссии по радиотехнической и электронной промышленности.
2. Тема — 18.820.01-74.
3. Стандарт СЭВ утвержден на 41-м заседании
ПКС.
4. Сроки начала применения стандарта СЭВ:
|
Страны |
Срок начала применения стандарта СЭВ в |
Срок начала применения стандарта СЭВ в |
|
НРБ |
Январь 1979 г. |
Январь 1981 г. |
|
ВНР |
Январь 1980 г. |
— |
|
ГДР |
||
|
Республика Куба |
||
|
МНР |
||
|
ПНР |
Январь 1979 г. |
Январь 1979 г. |
|
СРР |
Июль 1979 г. |
— |
|
СССР |
Январь 1978 г. |
Июль 1979 г. |
|
ЧССР |
— |
— |
5. Срок первой проверки — 1983 г.,
периодичность проверки — 5 лет.
|
1. Общие положения. 1 2. Технические требования. 1 2.1. Требования к конструкции. 1 2.2. Требования к электрическим параметрам и режимам.. 2 2.3. Требования к устойчивости при механических 2.4. Требования к устойчивости при климатических 2.5. Дополнительные требования. 4 2.6. Требования к надежности. 5 2.7. Требования к маркировке. 5 2.8. Требования к упаковке. 5 3. Правила приемки. 5 4. Методы испытаний. 7 5. Транспортирование и хранение. 35 6. Указания по эксплуатации. 36 Информационное приложение 1. 37 Информационное приложение 2. 37 Информационное приложение 3. 38 Информационное приложение 4. 39 Информационное приложение 5. 40 |
Устройство управления шаговым электродвигателем
А. ЛОЗОВОЙ, г. Казань
Шаговые электродвигатели незаменимы при конструировании точных устройств позиционирования. Многие из подобных двигателей имеют на статоре по две многополюсные сдвинутые относительно друг друга обмотки, каждая из них — со средним выводом. Последние обычно соединяют с плюсом источника питания, а остальные выводы в определенной последовательности — с минусом.
Когда через одну из половин обмотки течет ток, ее вторая половина обесточена. Устройство, схема которого показана на рисунке, управляет шаговым двигателем, заставляя его ротор вращаться в одну или другую сторону. Каждый из импульсов генератора на элементах микросхемы DD1 поворачивает ротор на один шаг Частоту импульсов (и шагов) изменяют переменным оезистооом R3. Нужную последовательность уровней напряжения, подаваемых на обмотки дви гателя, формирует кол ьцево й двухразрядный счетчик на D-триггерах DD3.1 и DD3.2. С помощью двух элементов «Исключающее ИЛИ» (DD2.2 и DD2.3) при необходимости инвертируют сигналы обратной связи счетчика, изменяя таким образом направления счета и вращения ротора двигателя М1 в зависимости от положения выключателя SA1. Элементы DD2.1 и DD2.4 — буферные.
Непосредственно коммутируют обмотки двигателя транзисторные ключи с открытым коллектором, входящие в состав микросхемы DD4 (использованы лишь четыре из семи имеющихся ключей). Все выходы микросхемы снабжены внутренними защитными диодами, общий катод которых — вывод 9. Таким образом, каждая полуобмотка зашунтирована диодом, устраняющим коммутационные выбросы напряжения.
Мощность электродвигателя М1 ограничена максимальным током через один ключ — 300 мА и суммарной мощностью, рассеиваемой микросхемой DD4, 2 Вт при температуре окружающей среды 25 °С. Микросхему К1109КТ23 можно заменить импортной — ULN2004A.
От редакции. Входные цепи ключей микросхемы К1109КТ23 рассчитаны и на непосредственное подключение к выходам микросхем структуры КМОП. Поэтому микросхемы DD1—DD3 можно заменить функциональными аналогами из серии К561: К155ЛАЗ на К561ЛА7, К155ЛП5 на К561ЛП2, К155ТМ2 на К561ТМ2, учтя различия а назначении их выводов, уменьшив в 500 раз емкость конденсатора С1 и увеличив во столько же раз сопротивление резисторов R2 и R3. После такой замены устройство можно питать от одного источника напряжением 12 В. Цепи питания микросхем следует зашунтировать конденсаторами.
Что такое JK-триггер?
Это триггер, который в случае получения на свои оба входа логической единицы меняет состояние своего выхода на противоположное значение. Одно из отличий от других подобных приборов – отсутствие запрещенных состояний, которые могут быть на основных входах. Как выглядит JK-триггер? Схема изображения может быть представлена с разной детализацией, а также зависимо от дополнений, которые были добавлены человеком. Как видите, в статье присутствуют различные изображения устройства. Также, используя базу JK-триггера, можно создать D- или Т-модель. Как вы сможете убедиться, просмотрев таблицу истинности, данный механизм в инверсное состояние переходит всегда, когда на оба входа осуществляется подача логической единицы. Различают два вида JK-триггеров:
- Универсальные.
- Комбинированные.
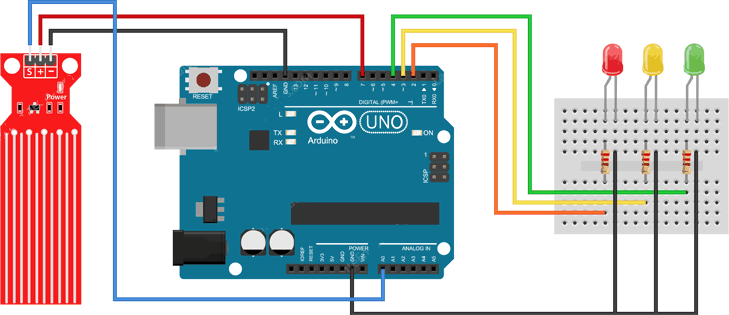
Как управлять шаговым двигателем через Arduino: схема подключения
Шаговый двигатель — один из основных компонентов роботехники, ЧПУ-станко, 3D-принетеров и других автоматических систем. В этой статье рассмотрим что это такое, как его подключить и как управлять шаговым двигателем с помощью Arduino.
На производстве и в быту при автоматической работе каких-либо механизмов часто требуется точное позиционирование рабочего органа или оснастки. Для этого могут использоваться серво приводы и шаговые двигатели. Эти два вида электропривода значительно отличаются, как по конструкции, так и по особенности работы и управления. В этой статье мы затронем тему работы с шаговыми двигателями с помощью Arduino и модуля для управления электродвигателями на базе ИМС ULN2003.