БИБЛИОТЕКА ACCELMOTOR
AccelMotor v1.2
Библиотека для расширенного управления и стабилизации мотора с энкодером
- Наследует все фишки из библиотеки GyverMotor (поддержка разных драйверов и режимов)
- Режим поддержания скорости с обратной связью
- Режим поворота на заданный угол с обратной связью
- Настраиваемые коэффициенты PID регулятора
- Ограничение ускорения и скорости
- Библиотека принимает любой тип обратной связи: энкодер, потенциометр, и т.д.
- Поддержка мотор-редукторов, настройка передаточного отношения энкодера
- Регулятор учитывает “мёртвую зону” мотора
- Все функции работают в градусах и “тиках” энкодера
Поддерживаемые платформы: все Arduino (используются стандартные Wiring-функции)
Сфера и цель применения
Энкодер – это датчик, применяемый в промышленной области с целью преобразования подконтрольной величины в электрический сигнал. При помощи него определяется, например, положение вала электрического двигателя. В связи с тем что каждое устройство, в котором применяется вращение, обязательно должно быть оснащено прибором, контролирующим точность вращательного момента, популярными сферами использования подобных преобразователей являются системы точного перемещения. Основная цель, с которой применяется энкодер, – это измерение угла поворота объекта во время вращения. Энкодеры незаменимы в процессе производства на станкостроительных предприятиях, в работотехнических комплексах. Используют их также во многих современных измерительных приборах, которые нуждаются в регистрации высокоточных измерений углов, вращения, поворотов и наклонов.

Подключение поворотного энкодера с Ардуино
Теперь, когда принципы работы различных энкодеров изучены, можно приступить к описанию схемы подключения к Ардуино.
Для этого понадобятся:
- любое устройство Ардуино, например, Arduino UNO, Arduino Mega, Arduino Leonardo, Arduino 101, Arduino Due;
- любой энкодер Ардуино.
Обзор поворотного энкодера
Поворотный энкодер — это датчик, используемый для определения углового положения вала, подобный потенциометру.
Пины, и что они означают:
- CLK: выход A (цифровой);
- DT: выход B (цифровой);
- SW: нажатие кнопки (цифровой);
- + : VCC-напряжение питания;
- GND: заземление.
Поворотный прибор может быть использован в основном для тех же целей, что и потенциометр. Однако потенциометр обычно имеет точку, за которую вал не может вращаться, в то время как энкодер может вращаться в одном направлении без ограничений. Чтобы сбросить показания положения, нужно нажать на вал вниз.
Данное устройство определяет угловое положение вращающегося вала с помощью серии прямоугольных импульсов. Он по существу имеет равномерно расположенные контактные зоны, соединенные с общим узлом, а также два дополнительных контакта, называемых A и B, которые находятся на 90 градусов вне фазы. Когда вал вращается вручную, контакты A и B синхронизируются с общим контактом и генерируют импульс. Подсчитав количество импульсов любого из этих выходов, можно определить положение вращения.
Чтобы определить направление и проверить, вращается ли штифт по часовой стрелке или против часовой стрелки, нужно сделать следующее:
- Если вращающийся вал движется по часовой стрелке, то сигнал A опережает B. В одни и те же моменты времени, A и B будут находиться на противоположных частях прямоугольной волновой функции.
- Если вал движется против часовой стрелки, то сигнал B опережает A.
Подключение
Если говорить в общем, то CLK, DT и SW, должны быть подключены к цифровым выводам на Ардуино, + должен быть подключен к 5V, а GND заземлен.
Пошаговая инструкция подключения проводов энкодера к Ардуино:
- CLK: подключите конец провода к пину CLK на поворотном энкодере, затем к любому цифровому выводу на Arduino (оранжевый провод).
- DT: подключите конец провода к пину DT, затем к любому цифровому контакту на Arduino (желтый провод).
- SW: подключите конец провода к пину SW, далее к любому цифровому контакту на Arduino (голубой провод).
- + : подключите провод к пину +, затем к контакту +5V на Arduino (красный провод).
- GND: подключите конец провода к пину GND на энкодер с контактом GND на Arduino. (Черный провод).
Как кодировать
Код изменяет высоту тона в зависимости от того, в каком направлении повернут энкодер. Когда он поворачивается против часовой стрелки, шаг уменьшается, а когда он поворачивается по часовой стрелке, шаг увеличивается.
Что понадобится:
- датчик поворотного энкодера;
- Ардуино;
- пьезодатчик;
- провода.
Вот сам код:
Описание кода
Итак, сначала нужно определить контакты, к которым подключен кодер, и назначить некоторые переменные, необходимые для работы программы. В разделе «Настройки» нужно определить два контакта в качестве входных данных, и запустить последовательную связь для печати результатов на последовательном мониторе. Также нужно прочитать начальное значение вывода A, затем поместить это значение в переменную aLastState.
Далее в разделе цикла снова изменить вывод A, но теперь поместить значение в переменную aState. Таким образом, если повернуть вал и сгенерировать импульс, эти два значения будут отличаться. Сразу после этого, используя второй параметр «if», определить направление вращения. Если выходное состояние B отличается от A, счетчик будет увеличен на единицу, в противном случае он будет уменьшен. В конце, после вывода результатов на мониторе, нужно обновить переменную aLastState с помощью переменной aState.
Это все, что нужно для этого примера. Если загрузить код, запустить монитор и начать вращать вал, значения станут отображаться на мониторе.
Упрощенный пример
Следующий пример кода продемонстрирует, как считывает сигналы Arduino на датчике энкодера. Он просто обновляет счетчик (encoder0Pos) каждый раз, когда энкодер поворачивается на один шаг, а параметры вращения отправляются на порт ПК.
Код:
Следует обратить внимание на то, что приведенный выше код не является высокопроизводительным. Он предоставлен для демонстрационных целей
Возможности подключения
Поскольку абсолютные энкодеры передают комбинации цифровых символов, а не аналоговые сигналы, они предлагают множество различных вариантов связи, в том числе:
Параллельная разводка: это пара проводов для каждого бита данных. Параллельная разводка отправляет каждый бит за раз, но для этого требуется больше проводов, что усложняет систему и требует дополнительных затрат;
Последовательные интерфейсы: они отправляют все биты информации через общий интерфейс, но последовательно, по одному. Это снижает количество необходимых проводов, стоимость, сложность и возможность ошибок;
Подключение к шине: полевые шины, такие как CAN, Profibus, Modbus и т. д., позволяют подключать несколько управляемых устройств по принципу Master / Slaves;
Industrial Ethernet (промышленный): поддерживает подключение очень большого количества устройств с очень высокой скоростью передачи данных. Существует широкий выбор протоколов, включая Ethernet / IP, EtherCAT, ProfiNET, DeviceNet, CANopen, IO LINK и др.
Абсолютные энкодеры
Преимущество абсолютных поворотных энкодеров заключается в том, что они дают возможность сразу определить положения объекта после включения питания устройства управления, не теряя драгоценного времени на выполнение поиска механизмами нулевых меток, то есть привязки объекта к системе отсчёта положения.
Абсолютные энкодеры имеют диск, на котором кроме меток обычного инкрементального датчика имеются дополнительные метки или прорези, для вычисления абсолютного положения. Каждая позиция соответствует уникальному коду, и даже движения, которые происходят, когда нет питания, записываются в точные значения положения и могут быть восстановлены сразу после подключения питания.
Существует два типа абсолютных датчиков: однооборотные и многооборотные энкодеры. Однооборотные датчики измеряют перемещения за один оборот или поворот на 360 градусов от начального положения. Процесс повторяется после каждого оборота. Многооборотные датчики измеряют то же самое, что и однооборотные, но также отслеживают количество полных оборотов вала, используя уникальное слово для каждой позиции и количества оборотов.
Абсолютные поворотные датчики предпочтительнее, когда актуальны вопросы безопасности, поскольку они «позиционируют» себя при включении машины. Однооборотные датчики более полезны для коротких перемещений. Многооборотные лучше подходят для более сложных или более длинных перемещений. Последние записывают данные позиции в электронном виде, как правило, в двоичном формате. Еще одним преимуществом является устойчивость к электронному шуму. Однако абсолютные поворотные датчики обычно стоят дороже, чем инкрементальные.
Где применяют энкодеры
На вопрос, что это за устройство такое — энкодер, можно ответить перечислением того, где используют данные приборы. Сферы применения угловых датчиков зависят от их сложности и способности выдерживать нагрузки.
Датчики поворота используют наиболее часто на станкостроительных заводах, в системах точного перемещения, робототехнических комплексах, в измерительных устройствах, где требуется точная фиксация поворотов, наклонов, вращений.
В промышленности и сложных механизмах, используют высокопроизводительные энкодеры, устойчивые к тепловому воздействию и взрывам.
Другие области и механизмы, в которых применяют эти датчики:
- в печатной промышленности: устройства устанавливают на валах, по которым движется бумага;
- в автомобилестроении: с их помощью определяют угол поворота колес (иногда взаимодействуют с движками);
- на металлообрабатывающих предприятиях для контроля вращения валов с металлическими лентами;
- в химической и пищевой промышленности: на оборудовании автоматизированной фасовки;
- в электротехнике.
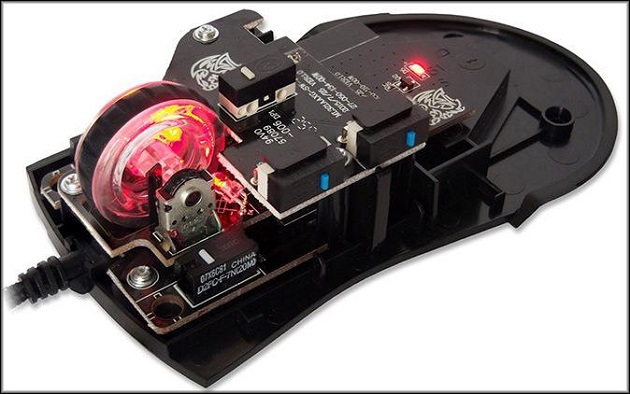
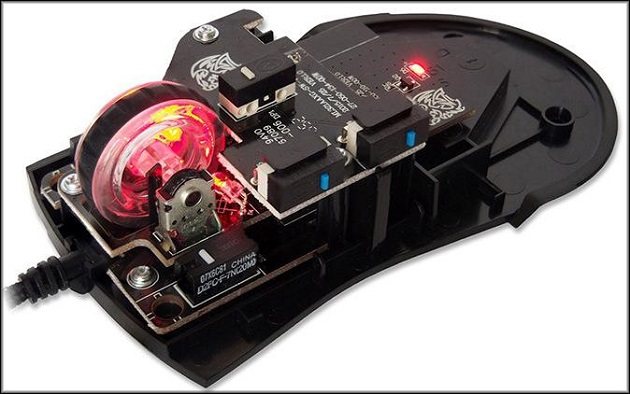
Пример использования прибора есть почти в каждом современном доме. Это обычная компьютерная мышь, в которой также установлен такой датчик.
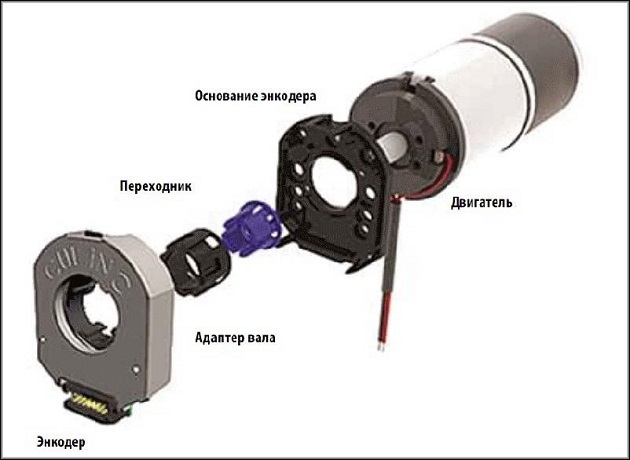
Монтаж и подключение датчиков поворота
Как правило, энкодеры устанавливают на валах, с которых нужно считывать информацию. Чтобы компенсировать различия в размерах, используют переходные муфты
Важно прочно закрепить корпус датчика при монтаже
Чаще всего угловые энкодеры работают вместе с контроллерами. Преобразователь подключают к нужным выходам. Затем программа определяет положение объекта в текущий момент, его скорость и ускорение.
Варианты подключения
В самом простом варианте, энкодер подключают к счетчику, запрограммированному измерять скорость.
Однако чаще работа энкодера осуществляется вместе с контроллером. Примером служат датчики поворота на валах двигателей, совмещающих какие-либо детали между собой. С помощью вычислений на основе поступающих данных, система отслеживает зазор между деталями. Когда достигнуто некоторое минимальное значение, совмещение деталей останавливается, чтобы их не повредить.
Другой случай — подключение энкодеров на двигателях с частотными преобразователями, где они служат элементами обратной связи. Здесь принцип того, как подключить устройство, еще проще. Датчик угла поворота подключается к ним с помощью платы сопряжения. Это позволяет точно поддерживать скорость и момент двигателя.
При использовании самодельного энкодера, сделанного своими руками, способ подключения может быть другим. Желательно проверить оба перечисленных варианта, доведя устройство до исправной работы.
После подключения желательно проверить все мультиметром.
WDG145H — Энкодер инкрементальный, оптический.Сквозной полый вал. Корпус Ø 145 мм
Документация на сайте производителя:английский >> немецкий >>
- Количества импульсов: 1024, 2500
- Корпус: диаметр 145 мм, длина 50 мм
- Сквозной полый вал: диаметр 45, 48, 50, 55, 60, 65 или 72 мм
- Максимальное число оборотов: 1600 об/мин
- Нагрузка на подшипник: макс. 200 N радиальная, 100 N аксиальная
- Выходные каналы: ABN, ABN, инвертированные AB, ABN
- Предельная частота: 200 кГц
- Рабочее напряжение: 4,75 — 5,5 В DC, 10 — 30 В DC
- Рабочая температура:-20 — +80°C
- Класс защиты: IP65
Общие технические данные на сайте производителяанглийский >> немецкий >>
Обзор инкрементальных энкодеров с полым валом на сайте производителяанглийский >> немецкий >>
Производители энкодеров
Среди российских производителей энкодеров мне известен лишь только Питерский СКБ ИС, который производит энкодеры марки ЛИР. К сожалению, российского промышленного оборудования сейчас почти не производится, и ЛИРы применяются лишь в военном и лабораторном оборудовании.
По этой причине я имею дело только с энкодерами зарубежного производства. Производителей энкодеров много – их производят почти все производители полупроводниковых датчиков. Чаще всего я встречаюсь с энкодерами Autonics – как и в случае с датчиками, в России представлен большой ассортимент. Другие известные мне производители энкодеров – немецкий Sick, японский Omron, и несколько китайских брендов.
Эффект Виганда
Эффект Виганда — это нелинейный магнитный эффект, названный в честь его первооткрывателя Джона Р. Виганда. Данное явление происходит в специально отожженной и закаленной проволоке, называемой проволокой Виганда.
Проволока Виганда изготавливается из низкоуглеродистого викаллоя, ферромагнитного сплава кобальта, железа и ванадия. Вначале проволока отжигается. Она притягивается к магнитам, и силовые линии магнитного поля «втягиваются» в провод. Но проволока сохраняет лишь очень небольшое остаточное магнитное поле, когда внешнее поле снимается.
Затем проволоку скручивают и раскручивают для холодной обработки внешней оболочки, пока сердечник остается мягким. Затем проволока выдерживается. Это делает магнитную коэрцитивную силу внешней оболочки намного выше, чем у внутреннего сердечника. Высокая коэрцитивность
оболочки позволяет ей сохранять внешнее магнитное поле, даже когда
первоначальный источник поля удален.
Теперь на проводе будет наблюдаться большой магнитный гистерезис: если к проводу поднести магнит, внешняя оболочка с высокой коэрцитивной силой удерживает магнитное поле от внутреннего мягкого сердечника. Но если магнитное поле превышает заданный порог, весь провод — как внешняя оболочка, так и внутренний сердечник — быстро меняет полярность
намагничивания. Это переключение (эффект Виганда) происходит за несколько
микросекунд.
Основные типы
Абсолютный
Абсолютный датчик сохраняет информацию о местоположении при отключении питания от кодера. Положение энкодера доступно сразу после подачи питания. Взаимосвязь между значением энкодера и физическим положением управляемого оборудования устанавливается при сборке; Системе не нужно возвращаться к точке калибровки для поддержания точности положения.
Абсолютный энкодер имеет несколько кодовых колец с различными двоичными весами, которые обеспечивают слово данных, представляющее абсолютное положение энкодера в пределах одного оборота. Этот тип энкодера часто называют параллельным абсолютным энкодером.
Многооборотный абсолютный угловой энкодер включает дополнительные кодовые колеса и зубчатые колеса. Колесо с высоким разрешением измеряет частичное вращение, а кодовые колеса с редуктором с низким разрешением записывают количество полных оборотов вала.
Инкрементальный
Инкрементальный энкодер
Инкрементный датчик будет немедленно сообщать об изменениях в положении, которое является одним из важнейших возможностей в некоторых приложениях. Однако он не сообщает и не отслеживает абсолютное положение. В результате механическая система, контролируемая инкрементным энкодером, может быть переведена в исходное положение (перемещена в фиксированную контрольную точку) для инициализации измерений абсолютного положения.
WDG53V — Энкодер инкрементальный, оптический. Цельный вал. Винтовой фланец Ø 53 мм
Технические данные WDG 53V:— Количества импульсов: 4, 9, 10, 15, 20, 25, 28, 30, 40, 50, 60, 90, 100, 120, 125, 128, 150, 160, 180, 200, 235, 250, 300, 314, 318, 360, 400, 500, 600, 625, 635, 720, 900, 1000, 1024, 1080, 1200, 1250, 1500— Корпус: диаметр 53 мм, длина 44 мм — Вал: диаметр 6 мм, длина 13 мм— Максимальное число оборотов: 6000 об/мин.— Нагрузка на подшипник: макс. 30 N радиальная, 45 N аксиальная— Выходные каналы: AB, ABN, инвертированные AB, ABN— Предельная частота: 200 кГц — Рабочее напряжение: 4,75 — 5,5 В DC, 10 — 30 В DC— Рабочая температура: -20 — +80°C, опционально -40 — +80°C— Класс защиты: IP68
Документация на сайте производителя:
английский >> немецкий >>
Что такое энкодер?
Широко распространены датчики положения, преобразующие угол поворота вала в электрический сигнал. Принципы работы их различны, но среди них есть группа датчиков, в которых для определения положения используется модуляция света, электрического или магнитного поля при помощи периодических структур (решётки, зубчатые колёса и т.п.), закреплённых на валу датчика и вращающихся вместе с ним. Такие датчики называют энкодеры . В процессе детектирования и обработки изменений модулированного сигнала, как правило, получают две импульсные последовательности, сдвинутые относительно друг друга, которые подаются на выход датчика непосредственно, либо с преобразованием в сигналы другой формы.
Принципы работы инкрементального энкодера
Инкрементальный энкодер представляет собой устройство кодирования по углу поворота (в отличие от линейного кодирования). По мере поворота входного вала он генерирует поток импульсов, по числу которых определяется угол поворота. Обычно применяется для определения углового перемещения двигателя или вала (оси). Часто используется для замены аналоговых потенциометров и конденсаторов переменной ёмкости. Имеет от трех до пяти контактов. Внешний вид типового инкрементального энкодера представлен на следующем рисунке.

Представленный на рисунке инкрементальный энкодер имеет следующие контакты:
- земля;
- контакт для подачи питающего напряжения 5В;
- контакт выходного сигнала A;
- контакт выходного сигнала B;
- контакт шкалы или контакт общего назначения.
Если на инкрементальный энкодер подано питающее напряжение и осуществляется вращение его ручки, то он генерирует следующую последовательность импульсов, показанную в следующей таблице.
То есть если мы вращаем ручку кодера по часовой стрелке, то мы будем иметь отрицательный перепад сигнала сначала на контакте A, а потом на контакте B.
Если же мы вращаем ручку кодера против часовой стрелки, то мы будем иметь отрицательный перепад сигнала сначала на контакте B, а потом на контакте A.
Если угловой кодер имеет 20 позиций, то перепад сигнала будет происходить один раз за 360/20 = 18 градусов. Если число позиций инкрементального кодера больше, то и его точность будет также увеличиваться.
Таким образом, мы будем иметь сведения о направлении вращения и угле поворота энкодера. Следовательно мы сможем определить и положение ручки энкодера в каждый момент времени.
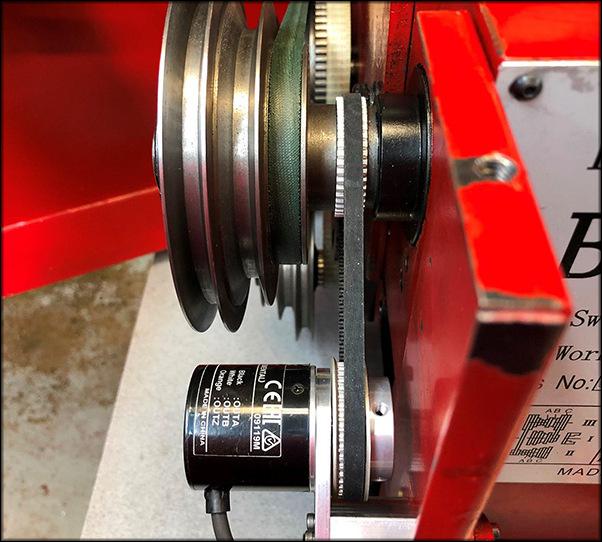
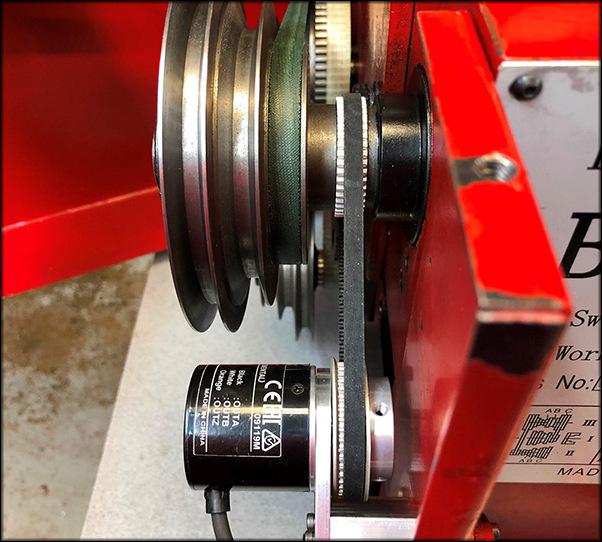
Монтаж
Энкодер крепится на валу, параметры вращения которого измеряются. Для монтажа используется специальная переходная муфта, позволяющая компенсировать возможную несоосность с валом энкодера, при этом его корпус должен быть жестко зафиксирован.
Другой вариант крепежа подходит для преобразователей с полым валом. В этом случае вал, параметры вращения которого подлежат измерению, непосредственно входит внутрь преобразователя и фиксируется в полой втулке либо в сквозном отверстии. В данном случае корпус энкодера не фиксируется, за исключением какой-либо пластины или ограничителя, не позволяющей ему вращаться.
Занимательная промавтоматика. Часть 4. Энкодеры. Установка и монтаж
Типы валов
По типу валов все энкодеры делятся на 2 основных типа, это:
2. С полым (сквозным или односторонним).
У первого типа датчика угла поворота связь с объектом контроля осуществляется с помощью прямого вала, который имеет специальный шлицевой выступ для крепления.
Второй тип не имеет выступающего вала, при этом крепление происходит за счет вала контролируемого объекта с помощью зажимной цанги или штифта.
Энкодеры с полым валом за счет своей конструкции обладают рядом преимуществ, таких как:
- Меньше стоимость, за счёт меньшего количества деталей;
- Занимает меньше места, за счет отсутствия выпирающего вала;
- Простая установка – нет необходимости сочленять 2 вала.
Установка. Фланцы: виды и особенности.
Крепление энкодера к валу двигателя может осуществляться следующими способами:
1. Корпус устройства закреплён жёстко за боковую фаску или торцевой фланец, а оси соединяются с помощью гибкой муфты – для прямых валов;
2. Оси соединены жёстко цанговым зажимом, корпус преобразователя угловых перемещений крепится через гибкую скобу, либо штифт – для полых валов.
Фланцы для крепления могут быть круглыми или квадратными :
- Круглые фланцы или гибкие способны гасить микробиения, возникающие из-за небольшого отклонения между осями энкодера и двигателя;
- Квадратные фланцы используются, когда необходимо обеспечить максимально жёсткое крепление устройства к корпусу двигателя.
Возможные ошибки в точности считывания
При монтаже следует помнить, что любая вращающаяся ось будет подвержена вибрации как с энкодером, так и без него. При этом неточность работы устройства может возникнуть из-за постоянного пружинящего воздействия на узел сопряжения из-за рассогласования подшипников и влияния момента инерции, а также воздействия пружинящего фланца.
Другая причина неточной работы энкодера может быть связана с асимметрией узла сопряжения – муфтой. Это приводит к радиальному зазору между валами, который вследствие влияния вибраций может только увеличиваться, что также приводит к неточной работе энкодера.
Для устранения неточностей работы из-за описанных проблем, могут быть использованы:
· Гибкая муфта – компенсирует непараллельность валов и угловое рассогласование;
· Гибкие фланцы — фланцевые адаптеры отлично компенсируют асимметрию валов относительно друг друга и гасят вибраций.
Что влияет на срок службы энкодера?
На срок эксплуатации датчика угла поворота могут повлиять следующие факторы:
- Скорость вращения;
- Температура;
- Вибрация;
- Нагрузка на вал.
Первое и второе воздействие невозможно компенсировать непосредственно, так как это диктуется технологической задачей. А значит, эти параметры надо предусмотреть на стадии покупки, выбрав модель в необходимом исполнении.
Влияния вибрации можно скомпенсировать, применив специальные гибкие муфты и фланцы, описанные ранее.
Нагрузка на вал в первую очередь будет зависеть от правильной установки — от того насколько точно совпадают оси валов энкодера и двигателя. Для этого надо четко представлять, где и как будет установлен датчика угла поворота.
Для правильного выбора модели энкодера, обратитесь за консультацией к нашим специалистам. Их помощь позволит не только подобрать необходимый датчик, но также сэкономит материальные и временные ресурсы.
Где применяют энкодеры
На вопрос, что это за устройство такое — энкодер, можно ответить перечислением того, где используют данные приборы. Сферы применения угловых датчиков зависят от их сложности и способности выдерживать нагрузки.
Датчики поворота используют наиболее часто на станкостроительных заводах, в системах точного перемещения, робототехнических комплексах, в измерительных устройствах, где требуется точная фиксация поворотов, наклонов, вращений.
В промышленности и сложных механизмах, используют высокопроизводительные энкодеры, устойчивые к тепловому воздействию и взрывам.
Другие области и механизмы, в которых применяют эти датчики:
- в печатной промышленности: устройства устанавливают на валах, по которым движется бумага;
- в автомобилестроении: с их помощью определяют угол поворота колес (иногда взаимодействуют с движками);
- на металлообрабатывающих предприятиях для контроля вращения валов с металлическими лентами;
- в химической и пищевой промышленности: на оборудовании автоматизированной фасовки;
- в электротехнике.
Пример использования прибора есть почти в каждом современном доме. Это обычная компьютерная мышь, в которой также установлен такой датчик.
Типы приборов
Устройства бывают нескольких типов. Типы энкодеров: инкрементальные и абсолютные, оптические и механические. Далее будет рассмотрено, что такое энкодер инкрементального типа, а затем обозрены другие типы.
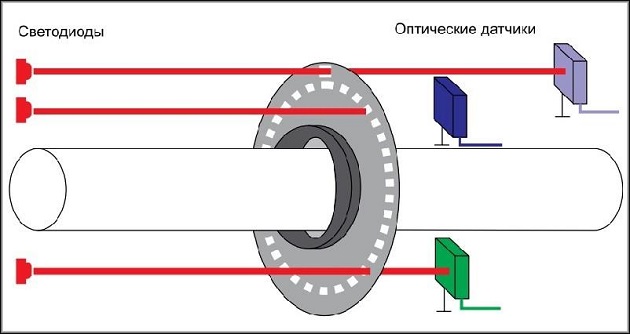
Инкрементальные энкодеры
Они распространены больше всего. В инкрементальном варианте вращательное движение вала преобразовывается в электрические импульсы. Его конструкция состоит из диска с прорезями и оптических датчиков.
Конструкция датчиков поворота данного типа, не позволяет им сообщать свое абсолютное состояние, а только величину изменения положения. Простой образец инкрементального устройства — шайба регулировки громкости автомобильной магнитолы.
Этот вид работает следующим образом. У него есть начальная нуль-метка, или выход Z, и два дополнительных выхода — A и B. Датчик создает две линии сигналов со смещенными на четверть фазы импульсами относительно друг друга. Разница импульсов указывает на направление вращения, а их количество — на угол поворота.

Разновидность инкрементальных энкодеров — сдвоенные, или квадратурные. Они состоят из двух датчиков, которые срабатывают со смещением в полшага. Квадратурные считают количество импульсов и учитывают направление.
У инкрементальных два главных минуса. Во-первых, нужно постоянно обрабатывать и анализировать сигнал, для чего используют контроллер и специальную программу. Во-вторых, они требуют синхронизации с нулевой меткой после включения. Для этого требуется инициализация для поиска выхода Z.
Абсолютные энкодеры
Датчики такого типа устроены более сложно. Но они позволяют определить величину угла поворота сразу после включения, не требуя синхронизации с нулевой меткой.
В основе конструкции поворотный круг, разделенный на одинаковые по размеру пронумерованные секторы. После включения устройства определяется номер сектора, на котором оно находится. Такое решение позволяет сразу зафиксировать положение, угол и направление вращения.
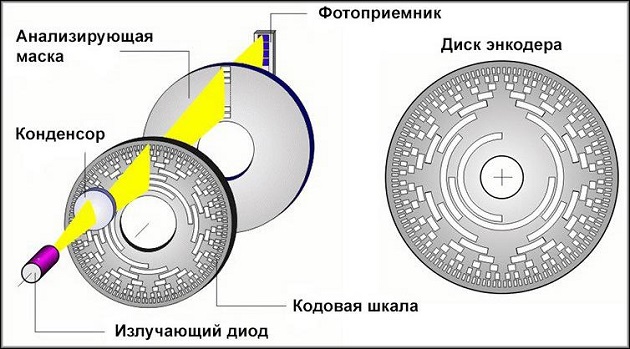
Принцип работы абсолютного энкодера основан на использовании кода Грея для определения текущего положения и других параметров. В них не требуется синхронизация с нулевым значением.
Единственный существенный недостаток этого типа угловых датчиков — необходимость все время переводить код Грея в двоичный код для регистрации положения датчика.
Многооборотные датчики поворота
Абсолютные энкодеры могут быть однооборотными и многооборотными.
Однооборотные показывают абсолютное значение после одного оборота. После этого код возвращается к начальному значению. Такие датчики используют в основном для измерения угла поворота.
Если нужно измерять обороты в системах с линейным перемещением, используют многооборотные энкодеры. В них есть дополнительный передаточный механизм, благодаря чему они регистрируют, помимо угла поворота, количество оборотов.
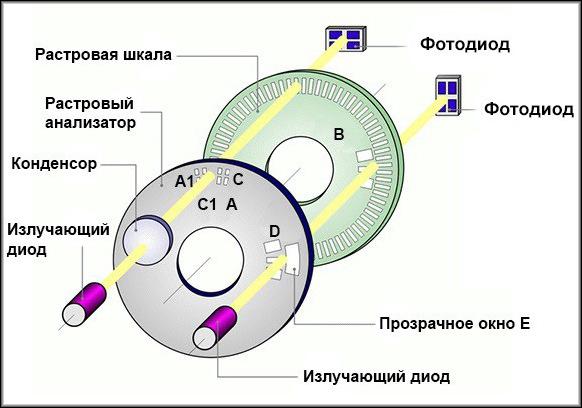
Оптические энкодеры
Диск оптического энкодера изготавливают из стекла. Отличие этого типа угловых датчиков, в наличии оптического растора, перемещающегося при вращении вала. При этом он создает поток света, который регистрирует фотодатчик.
Каждому положению энкодера соответствует определенный цифровой код, который вместе с количеством оборотов составляет единицу измерения устройства.
Оптические угловые датчики бывают фотоэлектрическими и магнитными.
В основе работающих датчиков лежит магнитный эффект Холла. Их точность и разрешение ниже, однако, и конструкция проще. Они лучше переносят сложные условия работы и занимают меньше места.
Фотоэлектрические датчики основаны на том же принципе. В них свет преобразуется в электрические сигналы.
Механические энкодеры
Также называются аналоговыми. Их диск изготавливают из диэлектрика и наносят на него выпуклые или непрозрачные области. Набор контактов и переключателей, позволяет вычислить значение абсолютного угла. Механические энкодеры также используют код Грея.
Один из недостатков этих энкодеров в том, что со временем контакты разбалтываются. В результате сигнал искажается, и прибор выдает неточные значения. А это сказывается на общей работоспособности. Оптические и магнитные энкодеры не имеют такого недостатка.