6.4. РЕАКТИВНЫЙ СИНХРОННЫЙ ДВИГАТЕЛЬ
В лабораторной практике, в быту и в маломощных механизмах применяют
так называемые реактивные синхронные двигатели.
От обычных классических машин они отличаются лишь конструкцией ротора.
Ротор здесь не является магнитом или электромагнитом, хотя по форме
напоминает собой полюсную систему.
Принцип действия реактивного синхронного двигателя отличен от рассмотренного
выше. Здесь работа двигателя основана, на свободной ориентации ротора
таким образом, чтобы обеспечить магнитному потоку статора лучшую магнитную
проводимость (рис. 6.4.1).
Действительно, если в какой-то момент времени максимальный магнитный
поток будет в фазе А — X, то ротор займет положение вдоль потока ФА.
Через 1/3 периода максимальным будет поток в фазе В — У. Тогда ротор
развернется вдоль потока ФВ. Еще через 1/3 периода произойдет ориентация
ротора вдоль потока. ФС. Так непрерывно и синхронно ротор будет вращаться
с вращающимся магнитным полем статора.
В школьной практике иногда, при отсутствии специальных синхронных двигателей,
возникает необходимость в синхронной передаче.
Эту проблему можно решить с помощью обычного асинхронного двигателя,
если придать ротору следующую геометрическую форму (рис. 6.4.2).
Угловая скорость в спорте
Угловая скорость часто используется в спорте. Например, спортсмены уменьшают или увеличивают угловую скорость движения клюшки для гольфа, биты или ракетки, чтобы улучшить результаты. Угловая скорость связана с линейной скоростью так, что из всех точек на отрезке, вращающемся вокруг точки на этом отрезке, то есть вокруг центра вращения, самая отдаленная точка от этого центра движется с самой высокой линейной скоростью. Так, например, если клюшка для гольфа вращается, то конец этой клюшки, больше всего удаленный от центра вращения двигается с самой высокой линейной скоростью. В то же время все точки на этом отрезке движутся с одинаковой угловой скоростью. Поэтому удлиняя клюшку, биту, или ракетку, спортсмен также увеличивает линейную скорость, а соответственно скорость удара, передающуюся мячу, так что он может пролететь на большее расстояние. Укорачивая ракетку или клюшку, даже перехватив ее ниже, чем обычно, наоборот замедляют скорость удара.
При первобытнообщинном строе главными охотниками были мужчины
У высоких людей с длинными конечностями есть преимущество в отношении линейной скорости. То есть, передвигая ноги с одинаковой угловой скоростью, они двигают ступни с более высокой линейной скоростью. То же происходит и с их руками. Такое преимущество может быть одной из причин того, что в первобытных обществах мужчины занимались охотой чаще, чем женщины. Вероятно, что из-за этого также в процессе эволюции выиграли более высокие люди. Длинные конечности помогали не только в беге, но и во время охоты — длинные руки бросали копья и камни с большей линейной скоростью. С другой стороны, длинные руки и ноги могут быть неудобством. Длинные конечности имеют больший вес и для их перемещения нужна дополнительная энергия. Кроме этого, когда человек быстро бежит, длинные ноги быстрее двигаются, а значит, при столкновении с препятствием удар будет сильнее, чем у людей с короткими ногами, которые двигаются с той же линейной скоростью.
В гимнастике, фигурном катании и нырянии также используют угловую скорость. Если спортсмен знает угловую скорость, то легко вычислить количество переворотов и других акробатических трюков во время прыжка. Во время кувырков спортсмены обычно прижимают ноги и руки как можно ближе к корпусу, чтобы уменьшить инерцию и увеличить ускорение, а значит и угловую скорость. С другой стороны, во время ныряния или приземления, судьи смотрят, как ровно спортсмен приземлился. На высокой скорости трудно регулировать направление полета, поэтому спортсмены специально замедляют угловую скорость, немного вытягивая от корпуса руки и ноги.
Спортсмены, которые занимаются метанием диска или молота, тоже контролируют линейную скорость с помощью угловой. Если просто бросить молот, не вращая его по кругу на длинной стальной проволоке, увеличивающей линейную скорость, то бросок будет не таким сильным, поэтому молот сначала раскручивают. Олимпийские спортсмены поворачиваются вокруг своей оси от трех до четырех раз, чтобы увеличить угловую скорость до максимально возможной.
Как подключить частотный преобразователь
Если кабель для подключения на 220 В с 1-й фазой, применяется схема «треугольника». Нельзя подключать частотник, если выходной ток выше 50% от номинального значения.
Если кабель питания на три фазы 380 В, то делается схема «звезды». Чтобы проще было подключать питание, предусмотрены контакты и клеммы с буквенными обозначениями.
- Контакты R, S, T предназначены для подключения сети питания по фазам.
- Клеммы U , V , W служат соединением электродвигателя. Для реверса достаточно изменить подключение двух проводов между собой.
В приборе должна быть колодка с клеммой подключения к земле. Подробней, как подключить, здесь.
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр = nобр = f1 × 60 ÷ p = n1
где:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Асинхронный или коллекторный: как отличить
Вообще, отличить тип двигателя можно по табличке — шильдику — на которой написаны его данные и тип. Но это только в том случае, если его не ремонтировали. Ведь под кожухом может быть что угодно. Так что если вы не уверены, лучше определить тип самостоятельно.
Так выглядит новый однофазный конденсаторный двигатель
Как устроены коллекторные движки
Отличить асинхронный и коллекторный двигатели можно по строению. У коллекторных обязательно есть щетки. Они расположены возле коллектора. Еще обязательный атрибут движка этого типа — наличие медного барабана, разделенного на секции.
Такие двигатели выпускаются только однофазные, они часто устанавливаются в бытовой технике, так как позволяют получить большое число оборотов на старте и после разгона. Также они удобны тем, что легко позволяют менять направление вращения — необходимо только поменять полярность. Несложно также организовать изменение скорости вращения — изменением амплитуды питающего напряжения или угла его отсечки. Потому и используются подобные двигатели в большей части бытовой и строительной техники.
Строение коллекторного двигателя
Недостатки коллекторных двигателей — высокая шумность работы на больших оборотах. Вспомните дрель, болгарку, пылесос, стиральную машину и т.д.. Шум при их работе стоит приличный. На малых оборотах коллекторные двигатели не так шумят (стиральная машина), но не все инструменты работают в таком режиме.
Второй неприятный момент — наличие щеток и постоянного трения приводит к необходимости регулярного технического обслуживания. Если токосъемник не чистить, загрязнение графитом (от стирающихся щеток) может привести к тому, что соседние секции в барабане соединятся, мотор попросту перестанет работать.
Асинхронные
Асинхронный двигатель имеет статор и ротор, может быть одно и трёхфазным. В данной статье рассматриваем подключение однофазных двигателей, потому речь пойдет только о них.
Асинхронные двигатели отличаются невысоким уровнем шумов при работе, потому устанавливаются в технике, шум работы которой критичен. Это кондиционеры, сплит-системы, холодильники.
Строение асинхронного двигателя
Есть два типа однофазных асинхронных двигателей — бифилярные (с пусковой обмоткой) и конденсаторные. Вся разница состоит в том, что в бифилярных однофазных двигателях пусковая обмотка работает только до разгона мотора. После она выключается специальным устройством — центробежным выключателем или пускозащитным реле (в холодильниках). Это необходимо, так как после разгона она только снижает КПД.
В конденсаторных однофазных двигателях конденсаторная обмотка работает все время. Две обмотки — основная и вспомогательная — смещены относительно друг друга на 90°. Благодаря этому можно менять направление вращения. Конденсатор на таких двигателях обычно крепится к корпусу и по этому признаку его несложно опознать.
Более точно определить бифилярный или конденсаторный двигатель перед вами, можно при помощи измерений сопротивления обмоток. Если сопротивление вспомогательной обмотки больше в два раза (разница может быть еще более значительная), скорее всего, это бифилярный двигатель и эта вспомогательная обмотка пусковая, а значит, в схеме должен присутствовать выключатель или пусковое реле. В конденсаторных двигателях обе обмотки постоянно находятся в работе и подключение однофазного двигателя возможно через обычную кнопку, тумблер, автомат.
Подписка на рассылку
Решив заменить вышедший из строя советский электродвигатель на новый агрегат, вы можете столкнуться с тем, что на старом устройстве не сохранилась табличка. Может оказаться и так, что информация на шильдике нечитаемая. Хорошо если сохранилась техническая документация. Но вероятность этого крайне мала. Выход есть и из такой ситуации. Рассмотрим методы установления мощности электрического агрегата.
Возможен ли расчет по габаритам?
Можно установить мощность электрического мотора по размерам, току, показанию счетчика, диаметру вала. Итак, как определить мощность электродвигателя без бирки по габаритам устройства.
Между собой электромоторы различаются, прежде всего, габаритами. Указанный способ применяют преимущественно для установления мощности 3-хфазных агрегатов.
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
Pэл = U × I, где
I — сила тока, А;
U — напряжение, В;
Pэл — подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Pэл = U × I × cos(alpha).
Кроме активной (подведенной) мощности существует также:
- S — реактивная, ВА. S = P ÷ cos(alpha).
- Q — полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = Pмех + Ртеп +Ринд + Ртр, где
Рмех — полезная вырабатываемая мощность, Вт;
Ртеп — потери на образование тепла, ВТ;
Ринд — затраты на заряд в индукционной катушке, Вт;
Рт — потери в результате трения, Вт.
Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
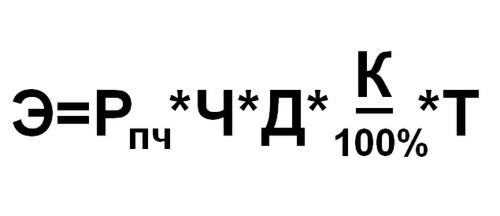
Экономия рассчитывается:
где Э – экономия денег в рублях;
Рпч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Модуль №4. Частотное регулирование скорости асинхронного двигателя

Виды электромеханических устройств
Статор — понятие и принцип действия
Используют ротор в таких электромеханических устройствах, как двигатели, работающие на постоянном и переменном электрическом токе, генераторы.
Агрегаты, работающие на переменном токе
К таким агрегатам относятся различные электродвигатели. Наиболее распространенная модель данного устройства состоит из следующих частей:
- Алюминиевый или чугунный ребристый корпус с монтажной коробкой для подключения обмоток статора и ротора;
- Статор – неподвижная часть в виде полого цилиндра, расположенная внутри корпуса. Обмотка статора состоит из 3 пар расположенных друг напротив друга намотанных в пазы корпуса катушек из медного изолированного провода
- Цельнометаллический цилиндрический ротор с валом и пазами, в которые впаяны обладающие высокой токопроводящей способностью алюминиевые стержни.
Двигатель, запитываемый от переменного тока
Вращается ротор на двух опорных подшипниках, запрессованных на его валу. Охлаждение работающего на больших оборотах электродвигателя происходит, благодаря крыльчатке – небольшому вентилятору, состоящему из множества лопастей и расположенному на одном из концов вала ротора. Также эффективному охлаждению работающего агрегата способствует ребристая структура алюминиевого корпуса.
Принцип работы подобного двигателя заключается в следующем:
- При подключении тока к агрегату он попеременно проходит через одну из трех пар катушек статора.
- При протекании по парам статорных катушек электрического тока они создают магнитное поле, силовые линии которого пересекают ротор.
- Попеременно запитываемые пары катушек создают подвижное магнитное поле, которое по закону электромагнитной индукции провоцирует появление в неподвижных металлических стержнях ротора электрического тока.
- Индуцированный ток в роторе приводит к появлению силы, выталкивающей его из магнитного поля статора. Так как частота подачи тока на катушки статора в среднем составляет порядка 30 импульсов в секунду, появившаяся в роторе выталкивающая сила приводит к его вращению с большой скоростью.
Важно! В зависимости от одновременности вращения ротора и порождающего это движение магнитного поля электрический двигатель переменного тока может быть синхронный (ротор агрегата вращается синхронно с магнитным полем статора) и асинхронный (вращение якоря не синхронизировано с движением магнитного поля статора). Первый вид отличается высокой мощностью и надежностью, в то время как второй характеризуется большим разнообразием конструкций и областей применения
Машины постоянного тока
Наиболее распространенный электродвигатель постоянного тока щеточного вида представляет собой электрический агрегат, состоящий из:
- Чугунного корпуса с ребрами охлаждения и специальным монтажным коробом для подключения обмоток агрегата;
- Вала из прочной инструментальной стали с двумя подшипниками;
- Якоря, состоящего из сердечника (набора пластин из специальной электротехнической стали), якорной обмотки (размещенных в пазах сердечника катушек из медного провода);
- Индуктора, состоящего из полюсов возбуждения с намотанными на них катушками из медного провода;
- Коллектора – расположенных на валу медных пластин, к которым подключаются выводы катушек якорной обмотки;
- Подпружиненных графитовых или металлографитовых щеток (щеточной группы).
Охлаждается такой двигатель, как и аналог, работающий от переменного тока, – расположенной на валу крыльчаткой.
Двигатель, работающий от постоянного тока
Важно! В отличие от электродвигателя переменного тока частотой вращения ротора в таком силовом агрегате управляет специальный блок, который при помощи установленного на валу датчика Холла определяет положение ротора и его скорость. Работает подобный агрегат следующим образом:
Работает подобный агрегат следующим образом:
- На обмотку возбуждения подается напряжение, создавая тем самым постоянное магнитное поле;
- Через щетки и коллектор напряжение подается на катушки сердечника якоря – возникающее при этом магнитное поле отталкивается от такого же, образованного индуктором, вследствие чего двигатель начинает вращаться («запускается»);
- Впоследствии при вращении через щетки запитываются остальные катушки якорной обмотки, что приводит к равномерному вращению якоря с определённой скоростью.
Останавливают вращение такого агрегата прекращением подачи напряжения на щеточную группу.
Помимо описанных выше электромоторов, к машинам, работающим на постоянном токе, относится также роторный стартер – устройство, необходимое для запуска бензиновых и дизельных автомобильных двигателей внутреннего сгорания.
Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
Экономия рассчитывается:
где Э – экономия денег в рублях;
Рпч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Типы роторов
Генератор тока переменного
В зависимости от области применения и строения, роторы бывают следующих типов:
- Фазный – якоря данного типа представляют собой совокупность намотанных на сердечник катушек, расположенных относительно друг другу под углом 1200. Концы проводов катушек выводятся к пластинам коллектора и запитываются при помощи щёточного узла.
- Короткозамкнутый –ротор такого типа состоит из цельного цилиндра с пазами, в которые укладываются стержни из электролитической меди или алюминия. Концы таких стержней соединяются между собой кольцом. Коллектора и щеточного узла в агрегатах, оборудованных подобным якорем, не имеется.
Двигатели с фазным типом якоря отличаются большими размерами и весом, но при этом обладают прекрасным пуском и регулировкой. Агрегаты с короткозамкнутыми роторами имеют меньшие размеры, меньшую подверженность поломкам, простоту в эксплуатации.
Разобравшись в том, что такое собой представляют ротор и статор, можно получить не только полезные теоретические знания, но и практические навыки: зная устройство агрегатов, работающих на постоянном и переменном токе, можно при наличии неисправности проверить работоспособность их основных узлов, определить, виноваты ли в поломке намотка якоря, статор, щеточный или коллекторный узел.
Также ответив на вопрос «ротор что это такое» и углубившись в устройство данной детали, можно производить перемотку сгоревших обмоток самостоятельно, что, в свою очередь, является достаточно востребованной и высокооплачиваемой работой.
Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
- Электродвигатели постоянного токаИспользуются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
- Электродвигатели переменного токаПользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
- Шаговые электродвигателиДействуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
- СерводвигателиОтносятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
- Линейные электродвигателиОбладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
- Синхронные двигателиЯвляются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
- Асинхронные двигателиТакже, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.