Принцип работы и элементы системы автоматического регулирования
В случае системы автоматического регулирования наблюдение и регулирование производится автоматически при помощи заранее настроенных приборов. Аппаратура способна выполнять все действия быстрее и точнее, чем в случае ручного регулирования.
Действие системы может быть разделено на две части: система определяет изменение значения переменной процесса и затем производит корректирующее воздействие, вынуждающее переменную процесса вернуться к заданному значению.
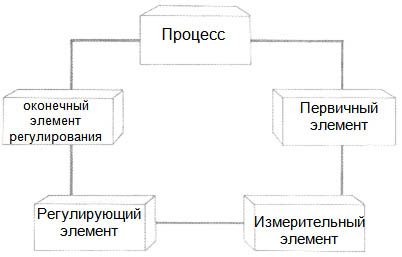
Система автоматического регулирования содержит четыре основных элемента: первичный элемент, измерительный элемент, регулирующий элемент и конечный элемент.
 Элементы системы автоматического регулирования
Элементы системы автоматического регулирования
Первичный элемент воспринимает величину переменной процесса и превращает его в физическую величину, которое передается в измерительный элемент. Измерительный элемент преобразовывает физическое изменение, произведенное первичным элементом, в сигнал, представляющий величину переменной процесса.
Выходной сигнал от измерительного элемента посылается к регулирующему элементу. Регулирующий элемент сравнивает сигнал от измерительного элемента с опорным сигналом, который представляет собой заданное значение и вычисляет разницу между этими двумя сигналами. Затем регулирующий элемент производит корректирующий сигнал, который представляет собой разницу между действительной величиной переменной процесса и ее заданным значением.
Выходной сигнал от регулирующего элемента посылается к конечному элементу регулирования. Конечный элемент регулирования преобразовывает получаемый им сигнал в корректирующее воздействие, которое вынуждает переменную процесса возвратиться к заданному значению.
В дополнение к четырем основным элементам, системы регулирования процессами могут иметь вспомогательное оборудование, которое обеспечивает информацией о величине переменной процесса. Это оборудование может включать такие приборы как самописцы, измерители и устройства сигнализации.
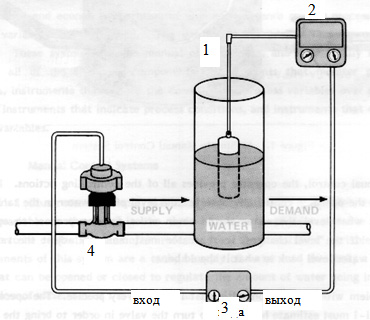 Схема простой системы автоматического регулирования
Схема простой системы автоматического регулирования
Одноконтурная система — регулирование
Одноконтурная система регулирования характеризуется наличием только одних главных связей между звеньями и отсутствием обратных и дополнительных связей. Обратная связь между объектом регулирования и чувствительным элементом является главной связью.
Одноконтурные системы регулирования — это системы стабилизации отдельных участков установки по сигналу от изменения какого-либо одного параметра процесса. Структура таких систем представляет собой последовательное соединение всех входящих в них элементов, образующих один контур регулирования.
Подобные одноконтурные системы регулирования были описаны в главе V. Отличие этой схемы заключается в отсутствии функционального преобразователя на входе регулятора. Объясняется это тем, что допустимый диапазон колебаний рН на выходе смесителя в процессах водоподготовки значительно уже: значение рН обработанной воды не должно отклоняться более чем на 0 2 — 0 3 единицы. Поэтому введение здесь нелинейной связи не является обязательным.
Кроме одноконтурных систем регулирования с одним регулируемым параметром, применяются схемы каскадного регулирования, в которых задание основному регулятору корректируется дополнительным регулятором.
|
Совмещенные частотный и амплитудный годографы, служащие для определения устойчивости релейной следящей системы. |
Рассмотрим одноконтурную систему регулирования с жесткой обратной связью.
В одноконтурных системах регулирования это может быть нежелательным — может сузить область устойчивости системы, создав расходящиеся колебания при больших начальных отклонениях там, где чисто линейная система с коэффициентом kl была бы устойчивой.
Для переключения одноконтурной системы регулирования с автоматического режима управления на ручной в модуле 1 на каждый контур регулирования предусмотрен нормально закрытый клапан, к которому подводятся выходной сигнал автоматического регулятора ИМ ( из блока типа БР) и выходные сигналы задатчика дистанционного управления ДУ и тумблера ОС со столешницы пульта.
Одним из основных недостатков одноконтурных систем регулирования является то, что любые возмущения в такой системе отрабатываются лишь через внешнюю цепь регулирования заданного параметра. К другим недостаткам следует отнести необходимость, индивидуальных расчетов переходных процессов для выбора корректирующих устройств и наладки каждой системы с определенными параметрами электропривода. Подобные задачи значительно проще решаются в системах подчиненного регулирования.
Таким образом, для одноконтурной системы регулирования скорости и в данном случае необходим ИПД-регуля-тор.
|
Параллельное согласованное ( а и встречное ( б соединения двух звеньев. |
На последовательном соединении звеньев основаны одноконтурные системы регулирования.
Удовлетворить требования структурной устойчивости для одноконтурных систем регулирования не всегда представляется практически возможным. Такие устройства называются стабилизирующими, а применение этих устройств с указанной целью — стабилизацией.
При автоматизации простых объектов обычно используют одноконтурные системы регулирования с одним регулятором, отрабатывающим сравнительно простой закон регулирования. При автоматизации сложных объектов ввиду наличия взаимосвязи между параметрами приходится применять сложные законы регулирования и включать в систему несколько регуляторов и вычислительных устройств.
Для системы с конденсацией пара при простой одноконтурной системе регулирования температуры, когда измерительный элемент устанавливается в реакторе, а регулирующий орган — на паровой линии, настройки регулятора могут быть определены экстраполяцией теоретических кривых на фиг. Например, при фазовом сдвиге в объекте 180 отношение амплитуд, а следовательно коэффициент усиления, который должен быть установлен на регуляторе, при пропорциональном регулировании будет 400 — 500, при этом период составит — 30 сек. Это должно дать вполне удовлетворительное регулирование и без использования каскадной системы. После установки вышеуказанной настройки действительно было получено очень хорошее регулирование, причем качество регулирования ограничивалось только наличием люфта в регуляторе.
История развития автоматического регулирования
Даты изобретения первых регулирующих устройств, так же как и имена их изобретателей, не установлены. Например, поплавковый регулятор уровня водяных часов, основанный на принципе регулирования по отклонению, был известен арабам ещё в начале н. э. На мукомольных мельницах в средние века применялись центробежные маятники для регулирования частоты вращения жерновов. Однако первыми регуляторами, получившими широкое практическое применение в промышленности, стали регулятор питания котла паровой машины И. И. Ползунова () и центробежный регулятор частоты вращения паровой машины Дж. Уатта (1784).
Первые регуляторы осуществляли прямое регулирование, при котором измерительный орган непосредственно воздействовал на регулирующий орган. Такое Р. а. было возможно только на машинах малой мощности, где для перемещения регулирующих органов (рычага, колеса) не требовалось больших затрат энергии. В 1873 французский инженер Ж. Фарко впервые осуществил непрямое Р. а., введя в цепь регулирования усилитель — гидравлический сервомотор с жёсткой обратной связью. Это дало возможность не только повысить мощность воздействия регулятора, но и получить более гибкие алгоритмы Р. а. В 1884 появился регулятор непрямого действия с дополнительной релейной обратной связью, действовавшей до тех пор, пока отклонение было отлично от нуля. Затем релейная связь была заменена непрерывной дифференциальной связью, получившей название изодромной.
Со 2-й половины 19 в. Р. а. применяется в самых различных технических устройствах— паровых котлах, компрессорных установках, электрических машинах и др. К этому же периоду относится и становление науки о Р. а. В статье Дж. К. Максвелла «О регулировании» () впервые рассмотрена математическая задача об устойчивости линейной CAP. Трудом И. А. Вышнеградского «О регуляторах прямого действия» (1877) заложена основа ТАР как новой научно-технической дисциплины. Дальнейшее её развитие и систематическое изложение дано А. Стодолой, Я. И. Грдиной и Н. Е. Жуковским.
Новый этап в развитии Р. а. наступил с применением в регуляторах электронных элементов, в частности вычислительных устройств, что существенно расширило возможность усовершенствования алгоритмов регулирования введением воздействий по высшим производным, интегралам и более сложным функциям. Преимущества электронных регуляторов особенно проявились в самонастраивающихся системах, первыми из которых были экстремальные регуляторы: регулятор топки парового котла (1926), электрический регулятор кпд (1940), авиационные регуляторы (1944). Однако подобные регуляторы применяют лишь в простейших случаях, например для поддержания экстремума функции одной переменной. В более сложных САР целесообразно разделить систему регулирования на две части: вычислительное устройство, определяющее оптимальную настройку регулятора, и собственно регулятор. В сложных системах управления Р. а. используется лишь на низшей ступени иерархического управления — регуляторы воздействуют непосредственно на управляемый объект, являясь исполнителями команд ЭВМ (или операторов), находящихся на более высоких ступенях управления.
Литература:
- Теория автоматического регулирования, под ред. В. В. Солодовникова, книга 1—3, М., 1967—69;
- Воронов А. А., Основы теории автоматического управления, ч. 1—3, М. — Л., 1965—70;
- Заде Л., Дезоер Ч., Теория линейных систем. Метод пространства состояний, пер. с англ., М., 1970;
- Бесекерский В. А., Попов Е, П., Теория систем автоматического регулирования, М., 1972;
- Сю Д., Мейер А., Современная теория автоматического управления и её применение, пер. с англ., М., 1972;
- Основы автоматического управления, под ред. В. С. Пугачева, 3 изд., М., 1974.
А. А. Воронов.
- Эта статья или раздел использует текст Большой советской энциклопедии.
Виды систем автоматического регулирования
Имеются два основных вида автоматических систем регулирования: замкнутые и разомкнутые, которые различаются по своим характеристикам и следовательно — по уместности применения.
Замкнутая система автоматического регулирования
В замкнутой системе информация о значении регулируемой переменной процесса проходит через всю цепочку приборов и устройств, предназначенных для контроля и регулирования этой переменной. Таким образом, в замкнутой системе производится постоянное измерение регулируемой величины, её сравнение с задающей величиной и оказывается соответствующее воздействие на процесс для приведения регулируемой величины в соответствие с задающей величиной.
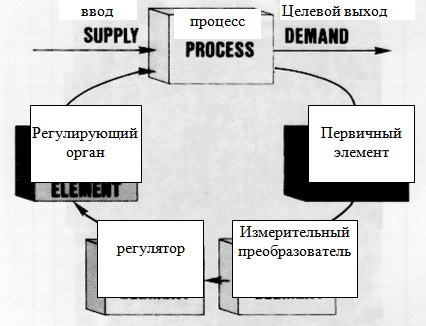 Схема замкнутой системы автоматического регулирования
Схема замкнутой системы автоматического регулирования
Например, подобная система хорошо подходит для контроля и поддержания необходимого уровня жидкости в резервуаре. Буек воспринимает изменение уровня жидкости. Измерительный преобразователь преобразует изменения уровня в сигнал, который отправляет на регулятор. Который, в свою очередь, сравнивает полученный сигнал с необходимым уровнем, заданным заранее. После регулятор вырабатывает корректирующий сигнал и отправляет его на регулирующий клапан, который корректирует поток воды.
Разомкнутая система автоматического регулирования
В разомкнутой системе нет замкнутой цепочки измерительных и обрабатывающих сигнал приборов и устройств от выхода до входа процесса, и воздействие регулятора на процесс не зависит от результирующего значения регулируемой переменной. Здесь не производится сравнение между текущим и желаемым значением переменной процесса и не вырабатывается корректирующее воздействие.
 Схема разомкнутой системы автоматического регулирования
Схема разомкнутой системы автоматического регулирования
Один из примеров разомкнутой системы регулирования — автоматическая мойка автомобилей. Это технологический процесс по мойке автомобилей и все необходимые операции чётко определены. Когда автомобиль выходит с мойки предполагается, что он должен быть чистым. Если автомобиль недостаточно чист, то система этого не обнаруживает. Здесь нет никакого элемента, который бы давал информацию об этом и корректировал процесс.
На производстве некоторые разомкнутые системы используют таймеры, чтобы гарантировать, что ряд последовательных операций выполнен. Этот вид разомкнутого регулирования может быть приемлем, если процесс не очень ответственный. Однако, если процесс требует, чтобы выполнение некоторых условий было проверено и при необходимости были бы сделаны корректировки, разомкнутая система не приемлема. В таких ситуациях необходимо применить замкнутую систему.
Система — прямое регулирование
Системы прямого регулирования являются простейшими системами. Не во всех, однако, случаях удается обеспечить заданный процесс регулирования, необходимую точность поддержания параметра в пределах схемы прямого регулирования. Зачастую исполнительное устройство должно развивать большое усилие для перестановки регулирующего органа. В таких случаях, чтобы обеспечить реализацию этого усилия, необходимо выбрать мощный измерительный орган.
Система прямого регулирования всегда может быть сделана устойчивой выбором Гк, и следовательно, плоскость Гй обязательно должна содержать область устойчивости.
Система прямого регулирования ( рис. 2 и 121) состоит из двух элементов: самого регулируемого объекта и автоматического регулятора прямого действия, воздействующего непосредственно на орган управления объектом.
Система прямого регулирования, измеритель которой имеет пренебрежимо малую массу, но существенное вязкое трение.
Системами прямого регулирования называются такие системы регулирования, у которых датчик воздействует непосредственно на изменение положения регулирующего органа. Регуляторы в этих системах называются регуляторами прямого действия.
Системами прямого регулирования называются системы, в которых регулирующий орган перемещается непосредственно чувствительным элементом системы. Дополнительные источники энергии в таких системах отсутствуют; вся энергия, необходимая для перемещения регулирующего органа, доставляется чувствительным элементом.
Примерами систем прямого регулирования могут быть приведенные ьыше системы регулирования уровня, скорости вращения двигателя и регулирования давления газа в резервуаре.
|
Система регулирования прямого действия. |
Достоинством систем прямого регулирования является простота и надежность. Они, как правило, органично вписываются в конструкцию управляемых объектов, не требуя посторонних источников энергии. Недостатком этих систем является невысокая точность при необходимости обеспечивать большие усилия для перемещения управляющих органов. Например, при стабилизации уровня жидкости в большом резервуаре с помощью регулятора прямого действия пришлось бы сильно увеличивать объем поплавка. Для точного регулирования частоты вращения паровой машины большой мощности, пар в которую подается через регулирующий клапан с большим усилием перестановки штока, необходимо увеличивать вращающиеся массы центробежного датчика, что приводит к ухудшению качества переходных процессов.
Простота систем прямого регулирования, выражающаяся в небольшом числе элементов и связей, определяет их высокую надежность в работе. Однако в ряде случаев применение системы прямого регулирования может привести к существенному ухудшению показателей автоматического регулирования объекта, а иногда ее применение вообще невозможно.
Недостаток системы прямого регулирования также в том, что всегда имеющаяся в таких системах обратная реакция z ( f) реагирующего элемента на чувствительный элемент ( пунктир на рис. 1.24, а) снижает чувствительность последнего, что ухудшает качество и точность регулирования.
Рассмотрим систему прямого регулирования с идеальными измерителями угловой скорости и углового ускорения.
Исследуем систему прямого регулирования, имея в виду конический регулятор, при движении которого не возникают силы постоянного трения.
|
Схемы систем прямого ( а и непрямого ( б регулирования напряжения на сварочном генераторе. |
В системах прямого регулирования чувствительный элемент ( датчик) непосредственно воздействуя на РО, сам поставляет ему необходимую энергию. Прямое регулирование возможно только тогда, когда датчик сам достаточно мощный.
Замкнутый принцип управления
Такая система отличается от предыдущей лишь наличием обратной связи по скорости. Схема ниже:
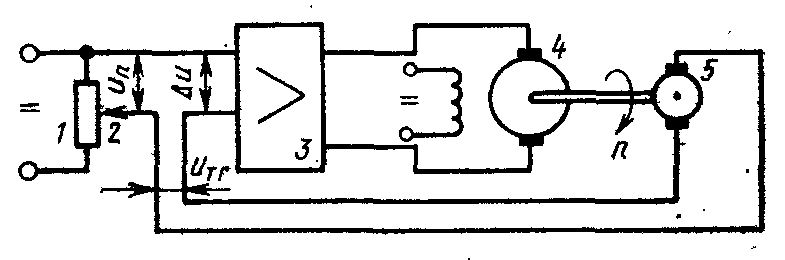
Наличие обратной связи с тахогенератора 5 сравнивать заданную скорость вращения с реальной и в итоге возникает ошибка ∆U = UП – UТГ. При этом сигнал ошибки будет подаваться на усилитель, который в свою очередь будет увеличивать скорость якоря машины до тех пор, пока ошибка ∆U не станет равной нулю или значению допустимой ошибки. Допустимая ошибка в таких системах определяется необходимой точностью, задаваемой технологическим процессом.
При автоматическом регулировании могут сочетать оба принципа управления и замкнутый и разомкнутый в сочетании друг с другом.
Ключевое понятие: коэффициент передачи
Коэффициент передачи – это отношение изменения выходной величины к изменению входной. Стабильность системы автоматического регулирования в первую очередь определяется коэффициентами передачи. Каждый элемент системы – контроллер, исполнительный механизм, регулируемый процесс и датчик – имеет собственный коэффициент передачи. Если наклон графика зависимости выходной величины от входной не меняется, коэффициент передачи элемента постоянен, и такой элемент можно называть линейным. Если же отклик элемента на изменение входного значения зависит от рабочей точки, то существует нелинейность и коэффициент передачи элемента непостоянен.
Произведение коэффициентов передачи всех элементов называется коэффициентом обратной связи замкнутой системы. Если его значение превышает единицу, то контур является неустойчивым, и небольшое возмущение вызывает нарастающие колебания. Если же коэффициент обратной связи меньше единицы, колебания затухают и система переходит в устойчивое состояние. Настройка контроллера – это выбор коэффициента передачи контроллера таким образом, чтобы коэффициент обратной связи был не слишком большим и не приводил бы к колебаниям, и не слишком малым, что сильно замедлило бы реакцию системы.
Если хотя бы один из коэффициентов передачи непостоянен, коэффициент обратной связи тоже непостоянен, и устойчивость системы может меняться. Чтобы добиться стабильной устойчивости, необходимо варьировать коэффициент передачи контроллера, компенсируя таким образом изменения других коэффициентов и не допуская, чтобы коэффициент обратной связи превысил единицу. Существенный вопрос: постоянны ли остальные коэффициенты передачи, или они меняются? Если меняются, необходимо определить насколько, каким образом, и по какой причине.
Любой коэффициент передачи состоит из стационарного значения и динамического компонента. Стационарное значение отражает окончательное изменение выходной величины после ступенчатого изменения входной, а динамический компонент определяет сглаживание при циклическом изменении входной величины.
Выбор — система — регулирование
Выбор системы регулирования по характеру действия ( например, позиционной, пропорциональной, астатической и др.) следует производить с учетом динамических свойств объектов и регулирующих приборов.
Выбор системы регулирования по характеру действия ( например, позиционной, пропорциональной, статической и др.) следует производить с учетом динамических свойств объектов и регулирующих приборов.
Выбор систем регулирования обусловлен технологической схемой отделения. Если предусмотрены центрифуги периодического действия, для которых нет жестких ограничений по расходу и гранулометрическому составу суспензии, поступающей на фугование, то система регулирования процесса разделения суспензии в гравитационных отстойниках несколько отличается от принятой выше. Это вызвано следующими причинами: суспензия, поступающая на разделение, характеризуется низким содержанием твердой фазы, при этом отпадает необходимость в построении сложной системы каскадно-связанного регулирования. Так как основной функцией отделения является получение маточника, свободного от содержания твердой фазы, и не регламентируется содержание твердой фазы в сгущенной суспензии, нет необходимости корректировать выгрузку сгущенной суспензии из отстойника по плотности осветленного маточника на сливе. Регулирование процесса разделения в гравитационных отстойниках осуществляется одновременно с регулированием выгрузки сгущенной суспензии по расходу суспензии, поступающей на разделение. Уровень в сборниках фугата стабилизируется регулятором с воздействием на расход фугата, поступающего в гравитационные отстойники.
Выбор системы регулирования по характеру действия ( например, позиционной, пропорциональной, астатической и др.) следует производить с учетом динамических свойств объектов и регулирующих приборов.
Выбор системы регулирования по характеру действия ( например, позиционной, пропорциональной, статической и др.) следует производить с учетом динамических свойств объектов и регулирующих приборов.
Выбор системы регулирования следует производить с учетом конкретных условий эксплуатации установки — требуемой точности поддержания заданного параметра, суточного колебания нагрузки, тепловой емкости системы, количества и типа холодильных агрегатов.
|
Принципиальная схема группового управления насосами-дозаторами растворов коагулянта и щелочи на химводоочистках с осветлителями и прямоточных. |
Выбор системы регулирования должен производиться в каждом случае с учетом конкретных условий. Возможно применение на одной и той же водоочистке для различных реагентов разных систем регулирования. Наиболее надежна и удобна система индивидуального регулирования, поэтому желательно отдавать ей предпочтение во всех случаях, когда это допустимо по экономическим соображениям. Системы группового регулирования еще не были применены в производственных условиях и особенности их не выявлены в полной мере. В настоящее время могут быть высказаны общие соображения об областях использования их.
Выбор системы регулирования скорости привода следует производить, руководствуясь условиями работы лифта и его назначением.
Для выбора системы регулирования необходимо знать зависимость точности нагрева от точности регулирования, от колебания производительности и степени черноты.
При выборе системы регулирования следует учитывать тепловую емкость объекта, допустимые отклонения температуры от заданной, а также тип компрессора.
Поэтому при выборе системы регулирования необходимо знать предполагаемый режим работы компрессора.
|
Принципиальная схема интегрального измерения среднего и среднеквадратичного отклонений параметров. |
Второй вопрос — выбор системы регулирования — сводится в основном к выбору числа и мощности регулирующих агрегатов или станций, установлению конкретного их назначения в различных условиях и методов распределения нагрузки между регулирующими агрегатами с целью создания необходимого для регулирования резерва мощностей.
|
Структурная схема регулирования по А. Д. Свенчанскому. |
Простейшая система — автоматическое регулирование
Простейшая система автоматического регулирования состоит из одною объекта регулирования и одного регулятора ( фиг. Системы автоматического регулирования, имеющие несколько регулируемых величин, подразделяются на системы несвязанного и связанного регулирования.
Простейшей системой автоматического регулирования является система первого порядка, которая состоит из одноемкостного объекта н простейшего пропорционального регулятора прямого действия, описываемого алгебраическим уравнением. Эта система в настоящее время применяется редко. Она всегда устойчива, но так как не представляет практического интереса, здесь не рассматривается.
Для простейших систем автоматического регулирования одно-емкостных объектов без запаздывания с безынерционными исполнительными устройствами Е. Г. Дудников рекомендует определять оптимальные настройки непосредственно при помощи решения дифференциальных уравнений системы регулирования при нулевых начальных условиях.
|
Электрическая эквивалентная схема, иллюстрирующая эффект запаздывания.| Система автоматического регулирования соотношения между потоками. |
В простейших системах автоматического регулирования технологических процессов используются стандартные регуляторы. Регулятор получает сигнал, характеризующий измеряемую величину переменного параметра процесса, сравнивает действительную величину переменной с заданной и приводит в действие клапан или другой регулирующий орган с целью свести разницу между действительной и заданной величинами переменной к нулю. Например, в системе автоматического поддержания температуры используется манометрический термометр, выдающий сигнал в виде давления, пропорционального измеряемой температуре.
Что собой представляет простейшая система автоматического регулирования.
Использование РУ как простейшей системы автоматического регулирования позволяет осуществить полную автоматизацию процесса подбора значений неизвестных. Для решения этим методом систему преобразуют, разрешая каждое уравнение относительно одной из неизвестных.
|
Система автоматического регулирования. |
На рис. 76 показана простейшая система автоматического регулирования.
|
Схема регулятора прямого действия.| Графики переходного процесса статического регулятора.| Статический регулятор косвенного действия. |
На рис. 81 представлена простейшая система автоматического регулирования с пропорциональным регулятором, называемым П — регулятором.
|
Система автоматического регулирования. |
На рис. 64 показана простейшая система автоматического регулирования. В объекте 2 энергия преобразуется или перерабатывается и выдается потребителю. От задатчика 5 в регулятор поступает задание.
|
Переходный процесс в системе, состоящей из астатического объекта и астатического регулятора. |
Проведенный анализ динамических особенностей простейших систем автоматического регулирования позволяет сделать некоторые обобщения и выводы, которые могут быть использованы при выборе регуляторов для конкретных объектов первого порядка вне зависимости от их конструктивных особенностей.
Возмущающие и задающие воздействия
Системы автоматического управления характеризуют по возмущающим и управляющим воздействиям.
Воздействие, стремящееся нарушить функциональную связь между регулируемой переменной и задающим воздействием, называют возмущающим. Для систем показанных выше таким воздействие может быть момент нагрузки, ток возбуждения электродвигателя.
Применительно системы выше напряжение на потенциометре будет задающим воздействием.
Также стоит отметить, что задающее воздействие g(t) может приложено только к элементу сравнения, то возмущающее – к любой точке системы.
Такие воздействия приводят к тому, что требуемые и реальные величины регулирования могут отличатся друг от друга. Разность между такими воздействиями называют ошибкой системы регулирования.
Разность между регулируемой величиной в данный промежуток времени и некоторым ее постоянным значением, принятым за номинальное, именуют отклонением величины регулируемой. (рис. а)).
При постоянном возрастании управляющего воздействия, ошибка регулирования ε(t) будет оставаться постоянной величиной, как показано ниже (рис. б)):
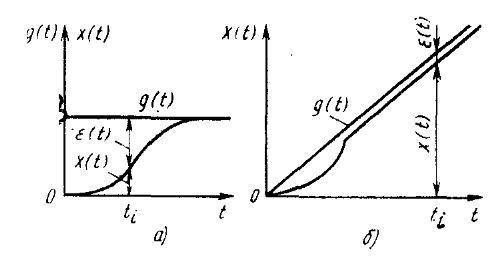
Где: g(t) – воздействие управляющее;
х(t) – величина регулируемая (на выходе системы);
f(t) – воздействие возмущающее;
ε(t) – сигнал ошибки;
Постоянство параметров и условий
В отличие от коэффициента передачи преобразователя, коэффициент исполнительного механизма очень часто бывает непостоянен. Характеристики демпферов, клапанов и насосов обычно приводят к нелинейной связи между относительным положением и потоком жидкости. С изменением рабочей точки исполнительного механизма нелинейность будет негативно сказываться на устойчивости всей системы.
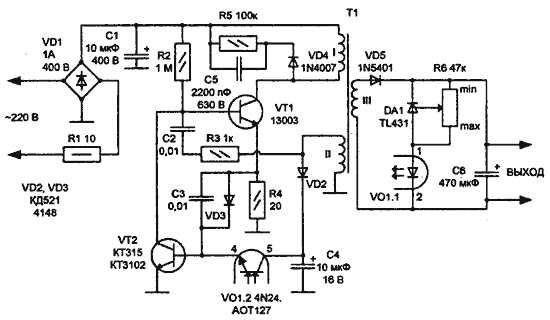
Свойства процесса, определяющие его коэффициенты передачи, также могут часто изменяться. Например, для реактора на рисунке 1 три кривые показывают, как меняется температура при скачкообразном увеличении скорости испарения (при высокой и низкой производительности) и при циклическом изменении скорости испарения.
Стоит отметить, что для этого реактора стационарное значение температуры при скачкообразном изменении потока пара обратно пропорционально производительности. Когда производительность мала, поток пара сильнее влияет на выходную температуру.
От производительности зависят и динамические свойства реактора. Чем меньше производительность, тем больше время отклика.
Когда скорость потока пара периодически меняется, амплитуда колебаний температуры оказывается существенно ниже, поскольку температура не успевает достичь стационарных значений. Таким образом, цикличность сглаживает отклик.
Такое поведение является типичным для многих процессов. Коэффициенты передачи часто зависят от производительности, которая свою очередь влияет на время отклика системы. При высокой производительности параметры изменяются менее инерционно и более плавно. Коэффициент передачи процесса становится меньше, что позволяет увеличить коэффициент контроллера, следовательно, регулировка становится четче. При низкой производительности наоборот, процесс сложнее контролировать, поскольку переменные реагируют с большой задержкой и скачкообразно. Коэффициент передачи процесса увеличивается, возрастает коэффициент обратной связи, и система становится неустойчивой.
Коэффициент передачи процесса часто определяется рабочей точкой. Более высокая температура уменьшает скорость реакции и снижает выход продукта. Изменение рабочей точки – плотности часто приводит к снижению чувствительности параметров процесса от скорости потока ингредиентов. Аналогично изменение геометрии емкости часто уменьшает чувствительность определения уровня жидкости.
В реакторе коэффициент передачи процесса зависит от заданной точки. Когда заданная точка соответствует высокой концентрации определенного ингредиента, остальные компоненты с меньшей массовой долей начинают сильнее влиять на чистоту конечного продукта. Например, при 99% концентрации ингредиента А, изменение в 1% концентрации вещества В (при неизменном объеме) удваивает загрязнение продукта. В то же время при 80% концентрации вещества А и однопроцентном изменении концентрации В, загрязнение увеличивается всего на 1/20. Существенные изменения рабочих точек, что может понадобиться при получении нескольких продуктов, часто требуют перенастройки или компенсации.
Методы автоматического регулирования
Системы автоматического регулирования могут создаваться на основе двух основных методов регулирования: регулирования с обратной связью, которое работает путем исправления отклонений переменной процесса после того, как они произошли; и с воздействием по возмущению, которое предотвращает возникновение отклонений переменной процесса.
Регулирование с обратной связью
Регулирование с обратной связью — это такой способ автоматического регулирования, когда измеренное значение переменной процесса сравнивается с ее уставкой срабатывания и предпринимаются действия для исправления любого отклонения переменной от заданного значения.
Система ручного регулирования с обратной связью
Основным недостатком системы регулирования с обратной связью является то, что она не начинает регулировки процесса до тех пор, пока не произойдет отклонение регулируемой переменной процесса от значения ее уставки.
Температура должна измениться, прежде чем регулирующая система начнет открывать или закрывать управляющий клапан на линии пара. В большинстве систем регулирования такой тип регулирующего действия приемлем и заложен в конструкцию системы.
В некоторых промышленных процессах, таких как изготовление лекарственных препаратов, нельзя допустить отклонение переменной процесса от значения уставки. Любое отклонение может привести к потере продукта. В этом случае необходима система регулирования, которая бы предвосхищала изменения процесса. Такой упреждающий тип регулирования обеспечивается системой регулирования с воздействием по возмущению.
Регулирование с воздействием по возмущению
Регулирование по возмущению — это регулирование с опережением, потому что прогнозируется ожидаемое изменение в регулируемой переменной и принимаются меры прежде, чем это изменение происходит.
Это фундаментальное различие между регулированием с воздействием по возмущению и регулированием с обратной связью. Контур регулирования с воздействием по возмущению пытается нейтрализовать возмущение прежде, чем оно изменит регулируемую переменную, в то время, как контур регулирования с обратной связью пытается отрабатывать возмущение после того, как оно воздействует на регулируемую переменную.
Система регулирования с воздействием по возмущению
Система регулирования с воздействием по возмущению имеет очевидное преимущество перед системой регулирования с обратной связью. При регулировании по возмущению в идеальном случае величина регулируемой переменной не изменяется, она остается на значении ее уставки. Но ручное регулирование по возмущению требует более сложного понимания того влияния, которое возмущение окажет на регулируемую переменную, а также использования более сложных и точных приборов.
На заводе редко можно встретить чистую систему регулирования по возмущению. Когда используется система регулирования по возмущению, она обычно сочетается с системой регулирования с обратной связью. И даже в этом случае регулирование по возмущению предназначается только для более ответственных операций, которые требуют очень точного регулирования.
Похожие записи:
 Как проверить резистор мультиметром на работоспособность
Как проверить резистор мультиметром на работоспособность
 Как лучше всего соединить медный и алюминиевый провод: все способы надежного соединения проводов из алюминия и меди
Как лучше всего соединить медный и алюминиевый провод: все способы надежного соединения проводов из алюминия и меди
 Ветроэнергетика. виды, устройство, использование ветрогенераторов. ветроэнергетические парки
Ветроэнергетика. виды, устройство, использование ветрогенераторов. ветроэнергетические парки
 Фильтр нижних частот для преобразования шим сигнала в аналоговое напряжение
Фильтр нижних частот для преобразования шим сигнала в аналоговое напряжение
 Схема подключения розетки на 380 вольт: разбираем во всех подробностях
Схема подключения розетки на 380 вольт: разбираем во всех подробностях
 Диэлектрические ножницы для резки проводов испытываются
Диэлектрические ножницы для резки проводов испытываются