Устройство
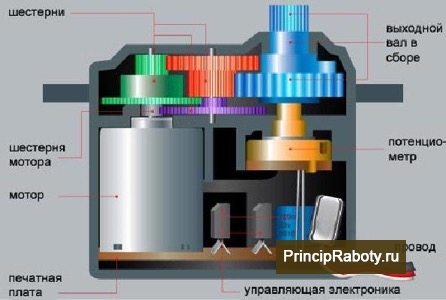 Рисунок 2. Устройство сервопривода
Рисунок 2. Устройство сервопривода
Сервопривод включает в свой состав такие элементы как:
- Приводной механизм – к примеру, это может быть электромотор. Благодаря ему становится возможным управление скоростью нужного диапазона в определённый временной момент;
- Датчики – осуществляют контроль над необходимыми параметрами. Могут быть предназначены для отслеживания положения, усилия, поворота угла или скорости вращения объекта;
- Блок управления – немало важный элемент, так как именно благодаря ему происходит поддержание требуемых параметров в автоматическом режиме;
- Блок питания – питает данный механизм.
Интересно, что самый простой управляющий блок чаще всего создаётся с использованием схемы сравнений значений на датчике и необходимых значений при подаче напряжения определённой полярности на привод.
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
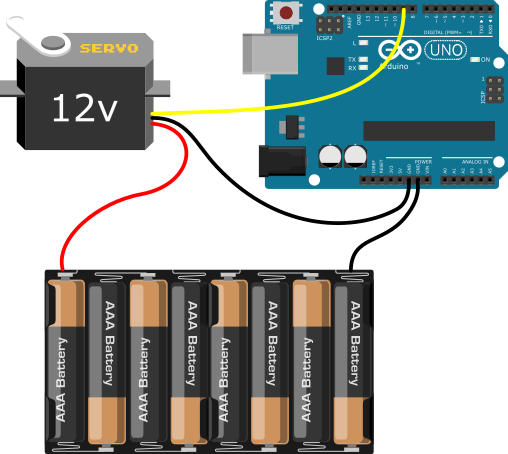
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода:
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
По аналогии подключим 2 сервопривода
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Переделка сервопривода в серво непрерывного вращения
Как описывалось выше, сервопривод управляется импульсами переменной ширины, которые задают угол поворота. Текущее положение считывается с потенциометра. Если рассоединить вал и потенциометр, серводвигатель будет принимать положение движка потенциометра как в средней точке. Все эти действия приведут к тому, что будет убрана обратная связь. Это позволяет управлять скоростью и направлением вращения по сигнальному проводу, и создать серво непрерывного вращения
При этом важно отметить, что серво постоянного вращения не может поворачиваться на определенный угол и делать строго заданное количество оборотов
Чтобы произвести вышеописанные действия, придется разобрать устройство и внести изменения в конструкцию.
В Ардуино IDE нужно создать небольшой скетч, который поставит качалку в среднее положение.
#include Servo myservo; void setup(){ myservo.attach(9); myservo.write(90); } void loop(){ }
После этого устройство нужно подключить к Ардуино. При подключении серво начнет вращаться. Нужно добиться ее полной остановки путем регулирования резистора. После того, как вращение прекратится, нужно найти вал, вытащить из него гибкий элемент и установить обратно.
Этот метод имеет несколько недостатков – настройка резистора до полной остановки неустойчива, при малейшем ударе/нагреве/охлаждении настроенная нулевая точка может сбиться. Поэтому лучше использовать способ замены потенциометра подстроечником. Для этого нужно вытащить потенциометр и заменить его на подстроечный резистор с таким же сопротивлением. Нулевую точку нужно настроить калибровочным скетчем.
Любой из методов переделки сервопривода в серво непрерывного вращения имеет свои недостатки. Во-первых, сложно настроить нулевую точку, любое движение может ее сбить. Во-вторых, диапазон регулирования мал – при небольшом изменении ширины импульса скорость может значительно измениться. Расширить диапазон можно программно в Ардуино.
Какие сервоприводы применяются?
Широкое распространение серводвигателей повлекло за собой появление их различных видов, которые можно разделить по следующим критериям:
Типы привода:
Линейные – самый быстрый разгон, высокая точность, долговечность. Примеры: актуатор, линейный модуль (см. рис.), линейные серводвигатели. |
|

Принцип действия:
Материал редуктора:
|
|
Тип ротора:
Монолитный ротор – вибрирует при вращении, невысокая точность; |
Способ управления:
|
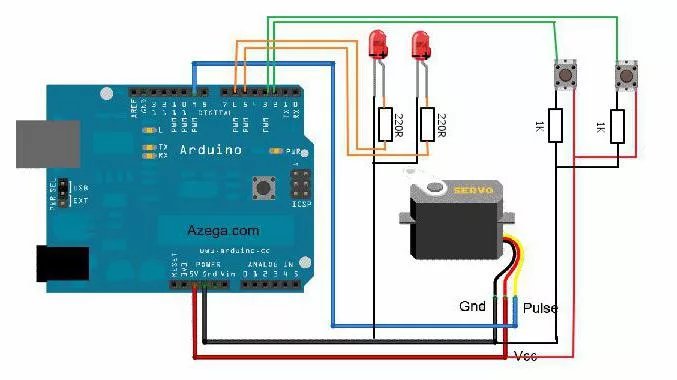
Как управлять Ардуино с клавиатуры
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- макетная плата;
- светодиод и резистор 220 Ом;
- сервопривод;
- провода «папа-папа» и «папа-мама».

Управление светодиодом на Arduino UNO с компьютера
Остальные исполнительные устройства для Arduino UNO вы можете взять на свое усмотрение и самостоятельно попробовать управлять ими через компьютер с помощью USB кабеля. Соберите на макетной плате схему с одним светодиодом из первого занятия Что такое Ардуино и как им пользоваться, а после сборки схемы со светодиодом загрузите следующий скетч в микроконтроллер.
Скетч. Взаимодействие Ардуино и компьютера
int val; // освобождаем память в контроллере для переменой
void setup() {
Serial.begin(9600); // подключаем последовательный порт
pinMode(13, OUTPUT); // объявляем пин 13 как выход
}
void loop() {
// проверяем, поступают ли какие-то команды
if (Serial.available()) {
val = Serial.read(); // переменная val равна полученной команде
if (val == '1') {digitalWrite(13, HIGH);} // при 1 включаем светодиод
if (val == '0') {digitalWrite(13, LOW);} // при 0 выключаем светодиод
}
}
Пояснения к коду:
- функция проверяет поступление команд с компьютера;
- функция читает данные, поступившие в Serial monitor.
- в условном операторе стоит знак двойное равенство «соответствие», а в скобках необходимо использовать одинарные кавычки.

Управление сервоприводом на Arduino UNO с компьютера
После сборки схемы загрузите следующий скетч в плату
Скетч. Управление сервоприводом с компьютера
#include <Servo.h> // подключаем библиотеку для сервопривода
Servo servo; // объявляем переменную servo типа "servo"
int val; // освобождаем память в контроллере для переменой
void setup() {
Serial.begin(9600); // подключаем последовательный порт
servo.attach(11); // привязываем сервопривод к выходу 11
}
void loop() {
// проверяем, поступают ли какие-то команды
if (Serial.available()) {
val = Serial.read(); // переменная val равна полученной команде
if (val == '1') { servo.write(10); } // при 1 поворачиваем серво на 10
if (val == '2') { servo.write(45); } // при 2 поворачиваем серво на 45
if (val == '3') { servo.write(90); } // при 3 поворачиваем серво на 90
}
}
Пояснения к коду:
- в некоторых примерах программ можно встретить такой вариант проверки появления данных в Serial monitor .
- в качестве команд можно использовать не только цифры, но и буквы. При этом имеет значение какая буква — прописная или строчная.
Скетч для сервопривода Ардуино
Скетч ниже заставит сервопривод переместиться в позицию 0 градусов, подождать 1 секунду, затем повернуться на 90 градусов, подождать еще одну секунду, после повернуться на 180 градусов и перейти в первоначальное положение.
Содержимое zip-файла размещается в папку arduino-xxxx/hardware/liraries.
Скетч № 1
Если сервомотор подключен к другому цифровому контакту, просто измените значение servoPin на значение используемого цифрового вывода.
Наш код просто объявляет объект и затем инициализирует сервопривод с помощью функции servo.attach(). Мы не должны забывать подключать серво библиотеку. В цикле мы устанавливаем сервопривод на 0 градусов, ждем, а затем устанавливаем его на 90, а затем на 180 градусов.
Скетч № 2
Второй скетч для варианта с Arduino Diecimilia ниже.
Нам достаточно будет скачать и подключить библиотеку из архива:
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия — например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом — при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые — контроллеры.
 Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей — с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни
В более дорогих моделях можно найти элементы из карбона и даже титана.


Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.
 Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни — самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания
Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения
Как будет работать наш проект
Чтобы запустить наш проект вам необходимо сделать HTML файл, который будет открывать веб-страницу. Для этого вам необходимо будет скопировать HTML код, приведенный ниже в данной статье и сохранить его в блокнот. Расширение у созданного файла должно быть ‘.html’. То есть, к примеру, если вы хотите назвать файл ‘servo’, то полностью имя файла будет ‘servo.html’, чтобы его легко можно было открыть в веб-браузере.
Теперь откройте скачанный html файл в веб-браузере, вы должны увидеть примерно следующую картинку:
После этого вставьте код программы для Arduino (приведен в конце статьи) в Arduino IDE, измените в этом коде имя пользователя и пароль для сети Wi-Fi на свои данные и загрузите программу в плату Arduino. В последовательном мониторе (Serial Monitor) вы можете увидеть IP адрес. Напечатайте этот IP адрес в поле на веб-странице. Теперь если вы будете двигать слайдер на представленной веб-странице, то сервомотор будет двигаться в соответствии с положением ползунка слайдера. Таким образом, вы можете управлять сервомотором с веб-страницы.
Принцип работы сервопривода
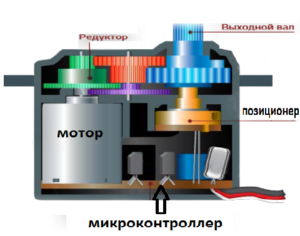
 Рисунок 3. Принцип работы сервопривода
Рисунок 3. Принцип работы сервопривода
Движение редукторного выходного вала, который связан сервоприводом с шестернями, происходит за счёт работы электродвигателя. Для регулирования оборотов предназначен редуктор. Для управления необходимыми механизмами вал соединяется непосредственно с ними.
Его положение контролирует специальный датчик (на них основано всё устройство), который преобразует угол поворота в электро-сигналы. Такой датчик носит название энкодера. Во время поворота бегунка сопротивление энкодера изменяется. Это изменение пропорционально зависимо от угла поворота датчика. Благодаря этому принципу работы механизм можно зафиксировать в нужной позиции.
Для поддержания отрицательной обратной связи используется электронная плата, которая обрабатывает сигналы, приходящие от энкодера. Она сравнивает параметры и определяет запускать или остановить электродвигатель.
Как управлять цифровым сервоприводом?
Приводы подключаются к программируемым контроллерам, среди которых хорошо известен Arduino. Подключение к его плате производится тремя проводами. По двум подается питающее напряжение, а по третьему — управляющий сигнал.
Инструкция сервопривода с цифровым управлением предусматривает наличие в контроллере простой программы, позволяющей считывать с потенциометра показания и переводить их в число. Затем оно преобразуется в команду передачи на поворот вала сервопривода в заданное положение. Программа записывается на диске, а затем передается на контроллер.
Применение приборов высокого качества необходимо в оборудовании, отличающемся высоким уровнем производительности.
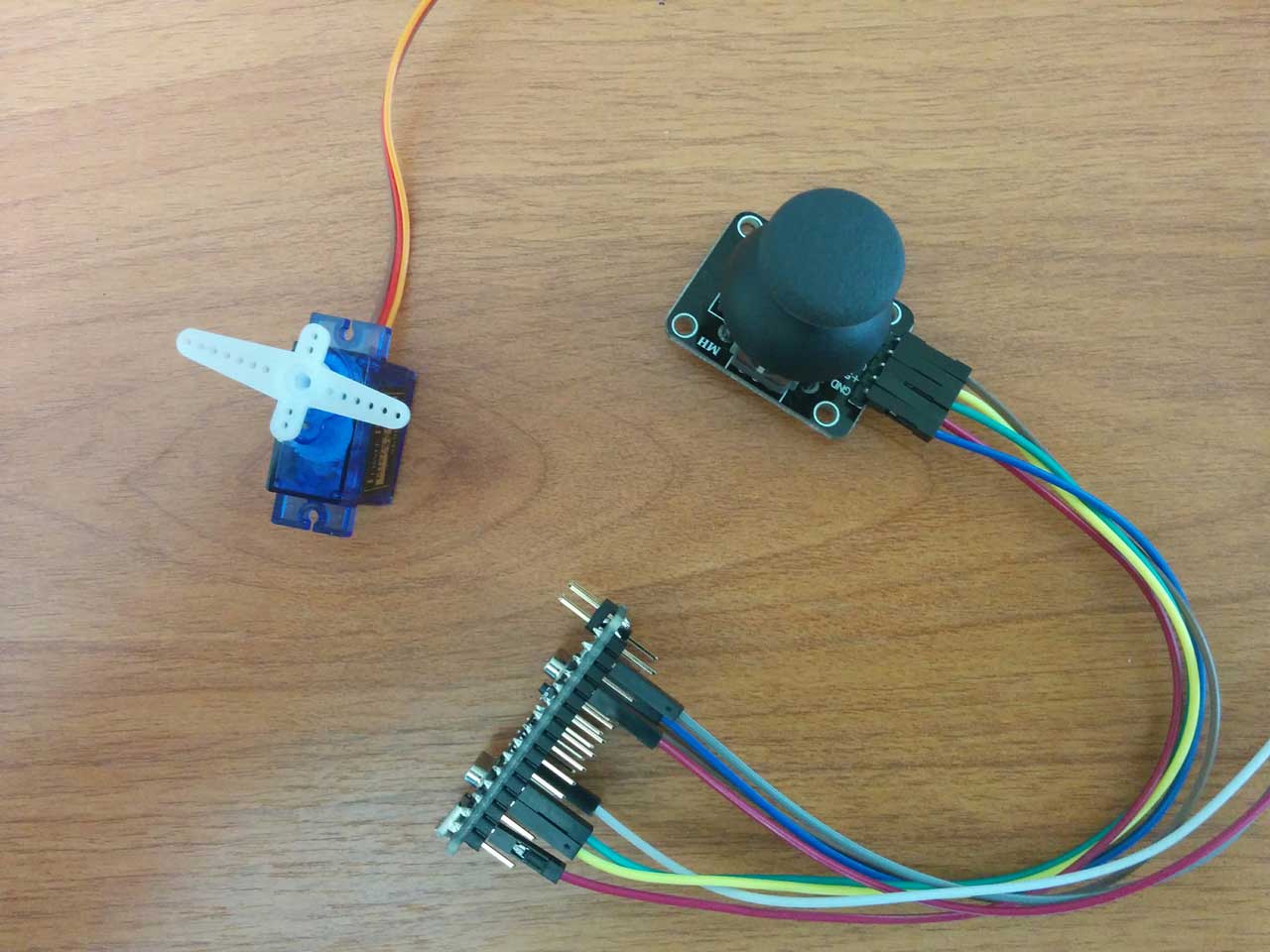
Как подключить джойстик модуль к Ардуино
07.06.2013 20:14:00
В данной статье разберем устройство, приведем примеры программного кода для работы с джойстиком, а в конце, в качестве усложненного примера, поуправляем двумя сервоприводами с джойстика.
Компоненты для повторения (купить в Китае):
Arduino UNO, либо Arduino Nano, либо Arduino Mega
Джойстик
Перемычки
Сервопривод SG90
Похожие вещи:
Шилд джойстик для платы Arduino
Рука на Arduino
Подключение к Arduino
Итак, по направлениям отклонения H (horizontal) и V (vertical), на плате джойстика установлены два потенциометра. Основываясь на их показаниях джойстик отслеживает отклонения влево, вправо, вверх, вниз и выдает аналоговый сигнал от 0 до 1023.
Ось Z посажена на кнопку и выдает цифровой сигнал (вкл/выкл).
Джойстик модуль имеет пятипиновый разъем стандарта 2.54мм:
VCC: “+” питания.
V: Вывод выходного аналогового сигнала по оси Y
H: Вывод выходного аналогового сигнала по оси X
KEY: Вывод выходного сигнала с кнопки
GND: “-” питания
Подключение модуля предельно просто:
VCC на + 5 Вольт Arduino.
GND на любой из GND пинов Arduino.
H и V на любые аналоговые входы Arduino (в примере H подсоединен к A4, V к A5).
KEY к любому цифровому пину Arduino (в примере подсоединено к D2).
Подключив модуль к Arduino остается лишь залить скетч для работы. В приведенном ниже скетче значения получаемые с потенциометров и кнопки будут отсылаться в последовательный порт компьютер
пример программного кода:
const int Y_PIN = 5; // Потенциометр оси Y подключен к аналоговому входу 5 const int X_PIN = 4; // Потенциометр оси X подключен к аналоговому входу 4сonst int BUTTON_PIN = 2; // Кнопка подключена к цифровому выводу 2 float stepSize = 180F / 1024; // Вычисляем шаг. градусы / на градацию // Угол поворота джойстика 180 градусов, АЦП выдает значения от 0 до 1023, всего 1024 градации void setup(){Serial.begin(9600); // Скорость работы с монитором порта } void loop(){int yVal = analogRead(Y_PIN); // Задаем переменную yVal для считывания показаний аналогового значенияint xVal = analogRead(X_PIN);float yAngle = yVal * stepSize; // Переводим выходные данные yVal в угол наклона джойстика (от 0 до 180)float xAngle = xVal * stepSize; // Аналогично xValboolean isNotClicked = digitalRead(BUTTON_PIN); // Считываем не было ли нажатия на джойстикSerial.print(“Horisontal angle = “); // Выводим текст Serial.println(xAngle); // Выводим значение угла Serial.print(“Vertical angle = “);Serial.println(yAngle);if (!isNotClicked){Serial.println(“Clicked”);}delay(1000);}
Открыв монитор порта мы видим значения которые выдает наш джойстик. Опираясь на эти данные уже можно собрать что-то интересное.
https://youtube.com/watch?v=OsH-V8Uu5-w
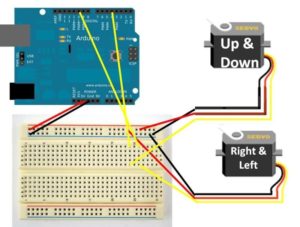
Для большей наглядности подключим 2 сервопривода (D9, D10) и пищалку (D12).При включении дуины сервоприводы принимают положение 90°. Одна отвечает за отклонения по оси X, вторая по оси Y. При нажатии на кнопку срабатывает пищалка.
#include Servo servo1;Servo servo2;const int Y_PIN = 5; // Потенциометр оси Y подключен к аналоговому входу 5 const int X_PIN = 4; // Потенциометр оси X подключен к аналоговому входу 4const int BUTTON_PIN = 2;const int SERVO1_PIN = 9;const int SERVO2_PIN = 10;const int LED_PIN = 13;float stepSize = 180F / 1024; // Вычисляем шаг. градусы / на градацию // Угол поворота джойстика 180 градусов, АЦП выдает значения от 0 до 1023, всего 1024 градации void setup(){ pinMode(LED_PIN, OUTPUT); servo1.attach(SERVO1_PIN); servo2.attach(SERVO2_PIN);} void loop(){ int yVal = analogRead(Y_PIN); // Задаем переменную yVal для считывания показаний аналогового значения int xVal = analogRead(X_PIN); float yAngle = yVal * Step; // Переводим выходные данные yVal в угол наклона джойстика (от 0 до 180) float xAngle = xVal * Step; // Аналогично xVal servo1.write(yAngle); // Задаем сервоприводу полученный угол servo2.write(xAngle); boolean isClicked = digitalRead(BUTTON_PIN); if (isClicked) { digitalWrite(LED_PIN, HIGH); } else { digitalWrite(LED_PIN, LOW); }}
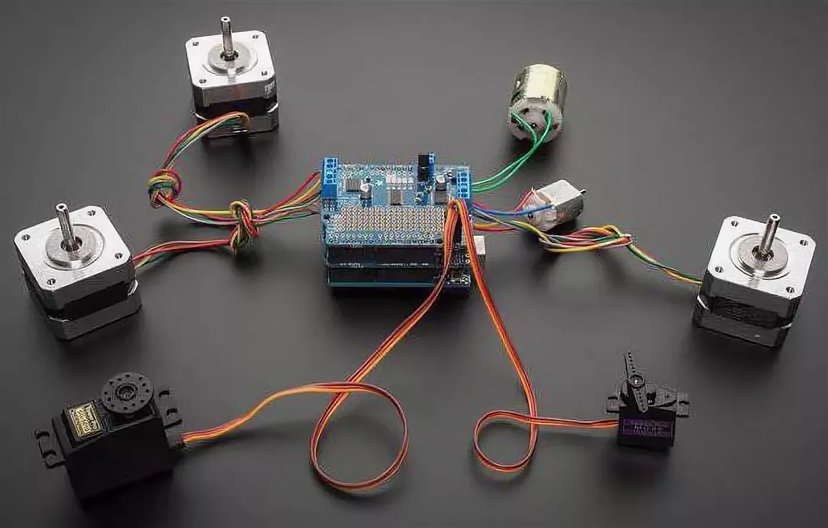
Набор для сборки 2ух осевого вращателя
Использованное в статье железо:
Плата Arduino, Сенсор шилд, Джойстик модуль, Пишалка модуль, Сервоприводы mini 9G
Соединительные провода “мама-мама”
Купить в России джойстик модуль
В данный момент еще реализованы не все элементы нашего сообщества. Мы активно работаем над ним и в ближайшее время возможность комментирования статей будет добавлена.
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек или . Отличие заключается в том, что функция задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Виды
Сервоприводы могут быть произведены в самых различных комплектациях. Эти устройства разделяют по принципу движения:
Вращательное
Представлено двумя вариациями: синхронной и асинхронной. Синхронный вариант помогает задать высокоточные параметры скорости вращения, углов поворота и ускорения. По сравнению с асинхронным скорость набирают быстрее, поэтому и стоят больше;
Асинхронный привод отличается способностью поддержания с большой точностью необходимой скорости даже в условиях низких оборотов.
Линейное
Также делится на два варианта: плоские и круглые. Двигатели данного типа развивают достаточно высокое ускорение (70 метров в секунду).
Ещё их выделяют по способу действия:
- Электромеханические механизмы – формирование движений происходит за счёт электродвигателя с редуктором;
- Электрогидромеханические – у них любое движение создаётся с участием системы поршня-цилиндра. В сравнении с электромеханическим приводом они обладают отличительно высоким быстродействием.
Подключение Arduino и джойстика:
- gnd — gnd;
- 5v — 5v (я подключил к 3.3v);
- VRX (сигнал для координат по оси X) — A1;
- VRY (сигнал для координат по оси Y) — A0;
- SW (режим кнопки — нажата или отпущена) — 2 пин.
Соединяем все наши чуда китайского производства, подключаем arduino к компьютеру, открываем Arduino IDE, заливаем скетч, указанный ниже. После загрузки скетча можно двигать манипулятором в стороны, сервомотор будет поворачиваться
.
#include //Библиотека для работы с сервомотором
int xPin = A1; //А1 — аналоговый сигнал Х координат джойстика
int yPin = A0; //А0 — аналоговый сигнал У координат джойстика
int buttonPin = 2; // Пин для режима кнопки (нажата или отпущена)
int xPosition = 0; // переменная для хранения текущей позиции джойстика по оси X
int yPosition = 0; // переменная для хранения текущей позиции джойстика по оси Y
int buttonState = 0; //текущее состояние кнопки (нажата)
int servoPin = 8; // пин для сигналов с сервомотора
Servo servo; // переменная типа Servo
int angle = 90; //стартовый угол поворота сервомотора
int currentXpos = 0; //Текущая позиция X
void setup() {
pinMode(xPin, INPUT); // Сигнал с xPin определяем как входной сигнал
pinMode(yPin, INPUT); // Сигнал с yPin определяем как входной сигнал
pinMode(buttonPin, INPUT_PULLUP); // активируем подтягивающий резистор на пине кнопки
servo.attach(servoPin); // присоединяем пин
servo.write(angle); // Поворачиваем сервомотор на 90 градусов
}
void loop() {
xPosition = analogRead(xPin); // читаем значение xPin
yPosition = analogRead(yPin); // читаем значение yPin
buttonState = digitalRead(buttonPin); // читаем «состояние» кнопки
//если значение xPosition больше 360
if(xPosition > 360) {
angle = angle-10; // уменьшаем угол поворота на 10 градусов
// если угол меньше 0
if(angle 180) {
angle = 180; //устанавливаем значение угла в 180 градусов
}
}
// если нажата кнопка джойстика
if(buttonState == 0)
{
angle = 90; //устанавливаем угол в 90 градусов
}
servo.write(angle); // поворачиваем сервомотор на нужный угол
delay(50); // добавляем задержку между считыванием данных
}
При подключении джойстика к питанию 3.3V значение по умолчанию для X и Y позиций было 330 (при подключении к 5V значения могут быть другие), для проверки значений текущих показаний и я взял отклонение от начального значения в 30 единиц.
Отследить значения аналоговых сигналов можно с помощью монитора серийного порта (открыть его можно так: инструменты -> монитор порта или CTRL + SHIFT + M). Для этого в функции setup()
необходимо написать следующее:
Serial.begin(9600); // инициализация обмена данными по серийному протоколу со скоростью 9600 bps
В функции loop()
написать следующее:
Serial.print(«X: «);
Serial.print(xPosition);
Serial.print(» | Y: «);
Serial.print(yPosition);
Serial.print(» | Button: «);
Serial.println(buttonState);
Вот видео того, что получилось:
Итак, в данной статье рассмотрен процесс подключения сервомотора и джойстика к Arduino Nano, приведен пример скетча. В дальнейшем я планирую подключить второй сервомотор, чтобы польностью использовать возможности джойстика и осуществлять поворот по осям X и Y.
Новые статьи

Простая реализация текстового поля с выпадающими подсказками (аналогично поиску у Яндекс и Google) при вводе текста на языке C# WPF. Реализация пользовательского элемента управления в C#/
Подключение джойстика к Arduino позволит сделать дистанционное управление с помощью джойстика машинкой или роботом на Ардуино. Рассмотрим в статье, как подключить джойстик шилд самостоятельно и сделать управление сервоприводом с помощью джойстика на Ардуино. Представим несколько скетчей и дадим схему подключения джойстика к микроконтроллеру Arduino Nano или Arduino Uno.
Заключение
Сервоприводы играют очень важную роль для многих проектов Ардуино, от робототехнических до систем умного дома. Все, что связано с движением, традиционно требует особых знаний и создать полноценный правильно работающий привод — непростая задача. Но с помощью серводвигателей можно во многих случаях упростить задачу, поэтому серво постоянно используется даже в проектах начального уровня.
В этой статье мы постарались раскрыть разные аспекты использования сервоприводов в проектах arduino: от подключения до написания скетчей. Выбрав самую простую модель серво (например, sg 90) вы сможете без труда повторить приведенные примеры и создать свои первые проекты, в которых что-то движется и изменяется. Надеемся, эта статья поможет вам в этом.
Похожие записи:
 Можно ли встраиваемый холодильник использовать как обычный
Можно ли встраиваемый холодильник использовать как обычный
 Микроконтроллеры процессоры, проекты, программирование
Полицейская крякалка своими руками на pic. милицейская крякалка (сирена) на pic-микроконтроллере как разобрать крякалку от сигнализации
Микроконтроллеры процессоры, проекты, программирование
Полицейская крякалка своими руками на pic. милицейская крякалка (сирена) на pic-микроконтроллере как разобрать крякалку от сигнализации
 Флюоресценция
Флюоресценция
 Фары ваз 2106: правила установки и эксплуатации
Фары ваз 2106: правила установки и эксплуатации
 Устройство шагового двигателя: механизм его действия и назначение, где и как применяется
Устройство шагового двигателя: механизм его действия и назначение, где и как применяется