Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
- Электродвигатели постоянного токаИспользуются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
- Электродвигатели переменного токаПользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
- Шаговые электродвигателиДействуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
- СерводвигателиОтносятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
- Линейные электродвигателиОбладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
- Синхронные двигателиЯвляются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
- Асинхронные двигателиТакже, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Принцип работы асинхронного электродвигателя с фазным ротором
Статор этого электродвигателя ничем не отличается от обычного. А вот в его ротор добавлены обмотки трех фаз, соединенные в звезду, концы которых выведены на контактные кольца. По кольцам скользят щетки, с помощью которых обмотки подключаются к электрической цепи.
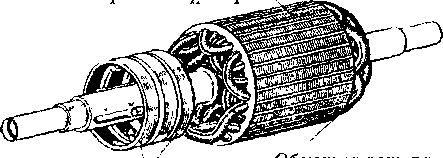
Фазный ротор
Асинхронный двигатель с короткозамкнутым ротором работает так:
- ток в обмотках статора создает вращающийся магнитный поток внутри него;
- изменяющийся во времени магнитный поток, пересекая витки обмотки ротора, наводит в них ЭДС;
- поскольку обмотка ротора замкнута, за счет наведенной ЭДС в ней возникает ток;
- проводники обмотки ротора с током взаимодействуют с вращающимся полем статора, создается вращающий момент.
Особенность асинхронного двигателя с фазным ротором: ток в роторе можно изменять, подключая последовательно с его обмотками резисторы. Чем больше сопротивление резистора, тем меньше ток в роторе. С уменьшением тока уменьшается и сила взаимодействия с вращающимся полем статора. Скорость вращения падает.
Наличие резисторов в цепи ротора увеличивает объем пускорегулирующей аппаратуры двигателя. Мощность, которая рассеивается на них, возрастает с мощностью электродвигателя. Но и для небольших моторов она существенна, что приводит к громоздким конструкциям магазинов сопротивлений и необходимости обеспечивать им постоянное охлаждение. Резисторы изготавливаются из материалов, имеющих высокое удельное сопротивление. Проводники их наматываются на каркасы или монтируются на изоляторы из фарфора. Конструкция помещается в кожух с жалюзийными отверстиями для охлаждения или закрываются сеткой.

Магазин резисторов для кранового электродвигателя с фазным ротором
Не всегда возможно разместить резисторы в помещениях. На кранах они находятся непосредственно на мосту, что приводит к массовому скоплению внутри них пыли и необходимости часто проводить техническое обслуживание.
Советуем изучить — Вольт-амперные характеристики электрических ламп
Плавная регулировка скорости электродвигателя с фазным ротором не производится. Изменение сопротивления в цепи ротора производится фиксированными ступенями. Для этого резисторы разделяются на секции, соединенные последовательно, в цепях которых устанавливаются контакторы управления. При необходимости увеличить скорость вращения контакторы шунтируют часть резисторов, уменьшая их суммарное сопротивление. Для достижения максимальной скорости вращения шунтируются все резисторы, для минимальной – не шунтируется ничего.

Асинхронный электродвигатель с фазным ротором
А теперь рассмотрим несколько примеров построения схем управления асинхронным двигателем с фазным ротором.
Наносим на график защитные характеристики, соответствующие полученным уставкам
2.1 Реле РТВ-II
Характеристики реле берем из справочных данных.
Уставка срабатывания реле – 375 А. Это начало нашей характеристики.
Характеристика защиты переходит на независимую часть при 160% от тока срабатывания, т.е. при 600 А. Независимая характеристика имеет выдержку времени 1,5 с. Построим получившуюся зависимость.
В базе Гридис-КС характеристики реле РТВ-II пока отсутствуют, поэтому воспользуемся встроенным инструментом построения произвольной зависимости .
Координаты рассчитанных точек перенесем в txt-файл как показано на рисунке ниже и загрузим файл в программу.
Принцип действия и устройство синхронного двигателя
Название синхронные относится к электрическим машинам переменного тока, в которых ротор и магнитное поле статора вращаются с одной и той же скоростью, т.е. синхронно.
Как и все электрические машины синхронные машины обратимы и могут работать как в режиме генератора, так и в режиме двигателя. Трехфазные синхронные машины это обычно машины большой мощности.
По устройству статора синхронная машина не отличается от асинхронной. Обмотка статора обычно соединяется звездой. Отличие синхронной машины от асинхронной заключается в различной конструкции ротора.
Ротор синхронной машины представляет собой постоянный магнит. В машинах средней и большой мощности ротор превращается в постоянный магнит с помощью электрического тока, т.е. это электромагнит. Для этого на роторе располагается отдельная обмотка (сосредоточенная), которая называется обмоткой возбуждения, по ней протекает постоянный ток, который называется током возбуждения. Обмотка ротора вращается вместе с ротором, поэтому требуется устройство подвода тока. На роторе располагается 2 медных кольца, к которым подсоединены выводы обмотки ротора, к неподвижной части крепятся графитовые щетки в щеткодержателях, эти щетки скользят по кольцам, обеспечивая контакт.
Источник постоянного тока, служащий для создания тока возбуждения обычно называется возбудителем. В качестве возбудителя используется генератор постоянного тока, генератор переменного тока с выпрямителем, полупроводниковый выпрямитель управляемый или не управляемый.
По конструкции ротора синхронные машины делятся на два типа:
· машины, имеющие ротор с неявно выраженными полюсами, в этом случае ротор имеет вид гладкого цилиндра.
· синхронные машины, имеющие ротор с явно выраженными полюсами. Такой ротор делается в тихоходных машинах с большим числом пар полюсов.
Формула электромагнитного момента такая же как и для асинхронного двигателя:
Синхронный двигатель, как и асинхронный имеет физическое ограничение по моменту. Если к валу ротора приложить тормозной момент, то двигатель его преодолеет, но оси полюсов ротора и статора разойдутся на некоторый угол.
Изобразим условно вращающееся магнитное поле в виде магнита.
При увеличении момента сопротивления увеличивается угол расхождения полюсов ротора и статора.
Обычно угол Θ берут ≤ 30°, поэтому перегрузочная способность синхронного двигателя: больше чем у асинхронного двигателя.
Перегрузочную способность можно изменить воздействуя на ток возбуждения увеличивая ток возбуждения Iв увеличивается магнитный поток Ф. увеличивается ЭДС E и увеличивается максимальный момент Mмакс .
Механическая характеристика синхронного двигателя абсолютно жесткая, при любом моменте сопротивления скорость его вращения одна и та же. Если Mс ≥ Mмакс. двигатель такой момент не преодолеет и остановится.
185.154.22.117 studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам.
Главная | О нас | Обратная связь
О наболевшем — Или расчет силы тока трехфазных асинхронных двигателей на 380В
Кстати при установке новых двигателей ничего и считать не надо, как правило номинальный ток для обоих режимов (звезда 380 и треугольник 220) указан на шильдике, вместе со всеми остальными параметрами.
Так какже, правильно расчитать, грубо или поточнее мощность асинхронного двигателя в стандартной ситуации? Для начала определимся с это самой «стандартной ситуацией» и с чем ее едят. Стандартной я называю ситуацию, когда двигатель расчитанный на 380\220 звезда\треугольник, подключается на стандартные 380 звездой, на все три фазы. В промышленности это встречается наиболее часто, и также часто вызывает вопросы по поводу того, какого номинала автоматы ставить, ибо многие, знают стандартную формулу мощности I=P\U и почемуто, видимо от большой грамотности или большого ума, от которого горе по Грибоедову, начинают для трехфазной нагрузки применять ее.
А теперь раскрываю секрет, страааашный секрет. Для расчета защиты маломощных двигателей на 380В, мощностью до 30 квт вполне достаточно умножить мощность ровно на 2, то есть P*2=
In , автомат все равно выбирается ближайший по номиналу в большую сторону, то есть 63А для 30 квт двигателя, имеющего на валу нагрузкой ну скажем турбину вентилятора типа Циклон. Это страаашный, нигде в учебниках не озвученный секретный экспресс-метод грубого расчета силы тока двигателей на 380В. Почему так? Очень просто при U=380В на один КВТ мощности приходится примерно сила тока в 2 Ампера. (Да меня щас побьют теоретики, которые помнят про КПД и Косинус ФИ. Помолчите Господа, пока помолчите, я же сказал, для МАЛОМОЩНЫХ двигателей до 30 квт, а для низких мощностей, зная модельный ряд наших автоматов, эти 2 значения можно и не учитывать, особенно если нагрузка на вал минимальная)
А теперь представим типовой двигатель* со следующими параметрами: P=30 квт U=380 В сила тока на шильдике стерлась. cos φ = 0,85 КПД=0,9
Как найти его силу тока? Если считать так, как советуют и сами считают упрямые «очень умные» горе-инженера, особенно любящие озадачивать этим вопросом на собеседованиях, то получаем цифру в 78,9А, после чего горе-инженера начинают лихорадочно вспоминать про пусковые токи, задумчиво хмурить брови и морщить лбы, а затем не стесняясь требуют поставить автомат минимум на 100А, так как ближайший по номиналу 80А будет выбивать при малейшей попытке запуска офигенными пусковыми токами. И переспорить их очень тяжело, так как все нижеследующее вызывает у умных дяденек бурю эмоций, недержание мочи и кала, разрыв шаблона, и погружение в глубокий транс с причитаниями и маханием корочками тех универов где они учились считать и жить..
Критерии выбора
Осуществлять выбор автоматического выключателя по мощности для долгой и продолжительной службы своему владельцу необходимо, исходя не только от него. Также нужно отталкиваться от бренда, цены, сечения кабеля, тока, длительно допустимого проводникового заряда, суммарной мощности бытовой аппаратуры, ампеража. Обязательно следует учесть в расчет номинальное токовое значение с селективностью, заводом изготовителем. Как правило, вся необходимая информация представлена на самом агрегате маркировкой.
Бренд и цена как критерий выбора автоматического отключателя
По мощности нагрузки
Мощность нагрузки — количество потребляемой энергии всеми электроприборами, которые подключены к одной линии. Чтобы определить это число, нужно рассчитать токовую нагрузку и выбрать больший токовый номинал или равный получившемуся значению.
Следует отметить, что значение электротока однофазной сети выше в 5 раз, а в трехфазной сети в 2 раза. То есть каждый электроприбор в киловаттах нужно умножить на 5 или 2, а затем перевести в амперы. В итоге получится правильное значение. Также для этого можно воспользоваться формулой I=P/U*cos φ или специальными онлайн-софтами, которые работают как калькулятор. Нередко подобные коэффициенты представлены в таблицах в сети.
Мощность нагрузки как критерий выбора
По сечению кабеля
Сечением электрокабеля называется та площадь кабельного сечения, которая способна без нагревания выдерживать конкретную нагрузочную мощность. Это очень важный параметр, поскольку при неправильном подсчете сечения, может выйти вся силовая линия. Чтобы это подсчитать, достаточно воспользоваться специальной таблицей, где указано сечение и мощность для подключения в сеть с одной, двух и тремя фазами. Определить сечение можно также по закону Ома и суммированием максимальной мощности всего оборудования.
Обратите внимание! Как правило, для дома выбирается сечение 3*4
Важно суммировать все электроприборы, даже те, которые включаются на короткое время
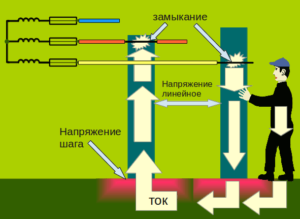
По току короткого замыкания (КЗ)
Для подбора автомата по электротоку короткого замыкания, важно четко следовать правилам ПУЭ. На данный момент использовать устройство с 6 килоампер запрещено. Поэтому сегодня особенно распространены системы с 10 килоампер
Поэтому сегодня особенно распространены системы с 10 килоампер.
По длительно допустимому току проводника
Ток неотключения — важный параметр при выборе автоматического выключателя, поскольку именно от этого параметра будет зависеть безопасная работа электросети
Важно отметить, что он может работать и не отключаться в момент превышения номинального токового значения на определенное число, указанное в его технических характеристиках. То есть подбирая аппарат, нужно рассчитывать силовую линию и брать значение с запасом. Для работы автоматического выключателя в момент превышения нагрузки, нужно определенное время
Оно регулируется существующим гостом от 2010 года. К примеру, среднее время реагирования — 50 секунд
Для работы автоматического выключателя в момент превышения нагрузки, нужно определенное время. Оно регулируется существующим гостом от 2010 года. К примеру, среднее время реагирования — 50 секунд.
В целом, автоматический выключатель — оборудование, основная задача которого заключается в обеспечении безопасности электросети от сверхтока с коротким замыканием и перегрузкой. Выбрать его нужно по критерию мощности, сечению кабеля, минимально и максимально допустимому проводниковому току.
https://youtube.com/watch?v=3JkX9F4cK3s
5.18.5 Сельсины
Представим себе два асинхронных двигателя с фазным
ротором включенным последующей схеме (рис. 5.18.5.1). Обмотки статора С1,
С2, С3, называемые обмотками возбуждения, включены в общую
сеть трехфазного тока.
Обмотки ротора P1, P2, P3
объединены трехпроводниковой линией связи. Магнитные потоки обмоток возбуждения
при q1=q2 наводят в соответствующих
обмотках роторов равные и совпадающие по фазе ЭДС.
Если ротор двигателя Д1 повернуть на угол q1,
а ротор Д2 оставить на месте (q2=0), то в фазных обмотках
ротора двигателя Д2 будет наведена ЭДС E2>E1. В результате
в линии связи потечет ток DI от большего потенциала к меньшему.
,
где 2z — сумма сопротивлений обмоток роторов и линии связи.
Этот ток, пройдя по обмоткам роторов, взаимодействуя
с магнитными полями статоров, вызовет образование дополнительных вращающих моментов
DM. Поскольку направление момента DМ в каждом двигателе
будет свое, то в одном из них произойдет поворот ротора вправо (у двигателя
Д2), а у другого — влево (у двигателя Д1).
Следовательно, оба двигателя самостоятельно (синхронно)
придут в положение (q1=q2).
Такая система получила название синхронно-следящей.
Практическое использование эта система получила
в многоприводных механизмах (конвейерах, козловых кранах и т.п.).
В автоматике применяются так называемые сельсины.
Это маломощные асинхронные машины с однофазным статором и трехфазным ротором.
Сельсины применяются для целей измерения или определения
угла, на который повернулся определенный механизм.
В сельсинной передаче всегда используются две машины:
сельсин-датчик и сельсин-приемник.
Обмотки возбуждения бывают обычно однофазные и
располагаются на явновыраженных полюсах. Число полюсов всегда два. Обмотки синхронизации
— трехфазные, размещаются в пазах ротора и оканчиваются тремя контактными кольцами
(рис. 5.18.5.2).
В отличие от силовых синхронно-следящих систем,
поворот ротора сельсина-датчика осуществляется принудительно, а ротор сельсина-приемника
приходит в движение автоматически. Поворот ротора фиксируется индикаторной стрелкой.
При наличии однофазных обмоток возбуждения на статоре
поворот ротора сельсина-датчика может осуществляться в любую сторону, т.к. пульсирующее
магнитное поле статора обеспечивает для этого необходимые условия.
Помимо приведенного индикаторного режима, сельсины
могут работать и в так называемом трансформаторном режиме.
В этом случае сельсин-приемник, не только показывает
угол рассогласования q, но и вырабатывает электрический сигнал
для управления мощным механизмом
Виды электромеханических устройств
Статор — понятие и принцип действия
Используют ротор в таких электромеханических устройствах, как двигатели, работающие на постоянном и переменном электрическом токе, генераторы.
Агрегаты, работающие на переменном токе
К таким агрегатам относятся различные электродвигатели. Наиболее распространенная модель данного устройства состоит из следующих частей:
- Алюминиевый или чугунный ребристый корпус с монтажной коробкой для подключения обмоток статора и ротора;
- Статор – неподвижная часть в виде полого цилиндра, расположенная внутри корпуса. Обмотка статора состоит из 3 пар расположенных друг напротив друга намотанных в пазы корпуса катушек из медного изолированного провода
- Цельнометаллический цилиндрический ротор с валом и пазами, в которые впаяны обладающие высокой токопроводящей способностью алюминиевые стержни.
Двигатель, запитываемый от переменного тока
Вращается ротор на двух опорных подшипниках, запрессованных на его валу. Охлаждение работающего на больших оборотах электродвигателя происходит, благодаря крыльчатке – небольшому вентилятору, состоящему из множества лопастей и расположенному на одном из концов вала ротора. Также эффективному охлаждению работающего агрегата способствует ребристая структура алюминиевого корпуса.
Принцип работы подобного двигателя заключается в следующем:
- При подключении тока к агрегату он попеременно проходит через одну из трех пар катушек статора.
- При протекании по парам статорных катушек электрического тока они создают магнитное поле, силовые линии которого пересекают ротор.
- Попеременно запитываемые пары катушек создают подвижное магнитное поле, которое по закону электромагнитной индукции провоцирует появление в неподвижных металлических стержнях ротора электрического тока.
- Индуцированный ток в роторе приводит к появлению силы, выталкивающей его из магнитного поля статора. Так как частота подачи тока на катушки статора в среднем составляет порядка 30 импульсов в секунду, появившаяся в роторе выталкивающая сила приводит к его вращению с большой скоростью.
Важно! В зависимости от одновременности вращения ротора и порождающего это движение магнитного поля электрический двигатель переменного тока может быть синхронный (ротор агрегата вращается синхронно с магнитным полем статора) и асинхронный (вращение якоря не синхронизировано с движением магнитного поля статора). Первый вид отличается высокой мощностью и надежностью, в то время как второй характеризуется большим разнообразием конструкций и областей применения
Машины постоянного тока
Наиболее распространенный электродвигатель постоянного тока щеточного вида представляет собой электрический агрегат, состоящий из:
- Чугунного корпуса с ребрами охлаждения и специальным монтажным коробом для подключения обмоток агрегата;
- Вала из прочной инструментальной стали с двумя подшипниками;
- Якоря, состоящего из сердечника (набора пластин из специальной электротехнической стали), якорной обмотки (размещенных в пазах сердечника катушек из медного провода);
- Индуктора, состоящего из полюсов возбуждения с намотанными на них катушками из медного провода;
- Коллектора – расположенных на валу медных пластин, к которым подключаются выводы катушек якорной обмотки;
- Подпружиненных графитовых или металлографитовых щеток (щеточной группы).
Охлаждается такой двигатель, как и аналог, работающий от переменного тока, – расположенной на валу крыльчаткой.
Двигатель, работающий от постоянного тока
Важно! В отличие от электродвигателя переменного тока частотой вращения ротора в таком силовом агрегате управляет специальный блок, который при помощи установленного на валу датчика Холла определяет положение ротора и его скорость. Работает подобный агрегат следующим образом:
Работает подобный агрегат следующим образом:
- На обмотку возбуждения подается напряжение, создавая тем самым постоянное магнитное поле;
- Через щетки и коллектор напряжение подается на катушки сердечника якоря – возникающее при этом магнитное поле отталкивается от такого же, образованного индуктором, вследствие чего двигатель начинает вращаться («запускается»);
- Впоследствии при вращении через щетки запитываются остальные катушки якорной обмотки, что приводит к равномерному вращению якоря с определённой скоростью.
Останавливают вращение такого агрегата прекращением подачи напряжения на щеточную группу.
Помимо описанных выше электромоторов, к машинам, работающим на постоянном токе, относится также роторный стартер – устройство, необходимое для запуска бензиновых и дизельных автомобильных двигателей внутреннего сгорания.
Похожие записи:
 Что такое латр и как он работает?
Что такое латр и как он работает?
 Что такое изолированная нейтраль и где она используется
Что такое изолированная нейтраль и где она используется
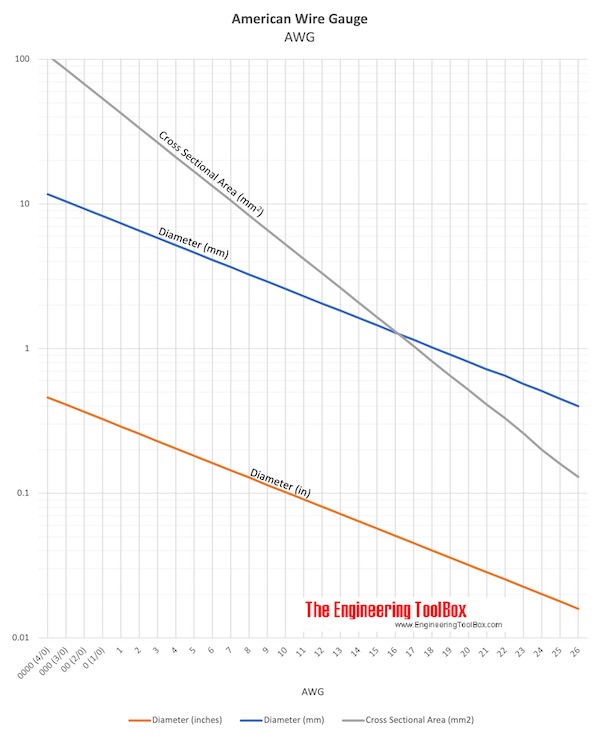 Американский калибр проводов — american wire gauge, awg (калибр проводов) → площадь в квадратных миллиметрах (mm², площадь сечения)
Американский калибр проводов — american wire gauge, awg (калибр проводов) → площадь в квадратных миллиметрах (mm², площадь сечения)
 Какая фитолампа лучше: советы от профи и проверенные бренды
Розетки и выключатели макел: обзор моделей
Какая фитолампа лучше: советы от профи и проверенные бренды
Розетки и выключатели макел: обзор моделей
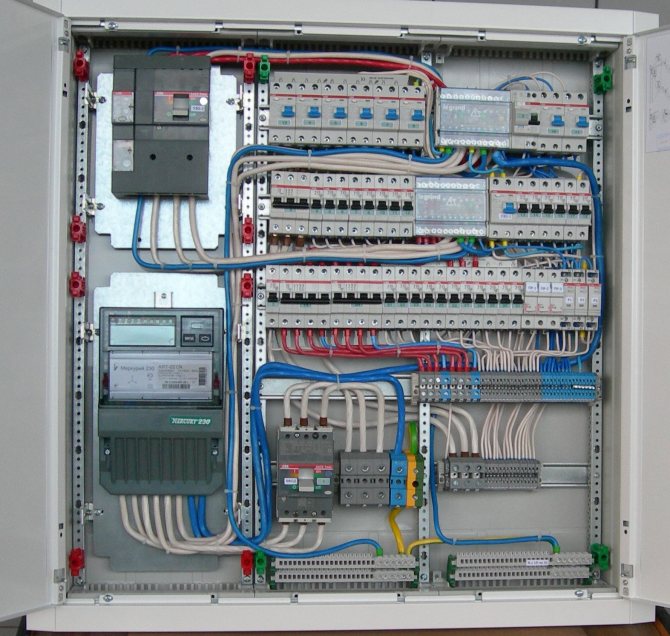 Подключение 380 вольт схема сбор щитка
Подключение 380 вольт схема сбор щитка