Управление несколькими сервоприводами сигналом с датчика
Если сигнал управления зависит от каких-то внешних факторов, то нужно подключать к Ардуино соответствующий датчик. В данном примере – аналоговый датчик угла (потенциометр). Управлять будем независимо двумя сервоприводами. Задача – следить за напряжением на датчике и закрывать один сервопривод в одну строну, а другой – в другую. Как-бы имитируя ворота.
Схема подключения выглядит так:
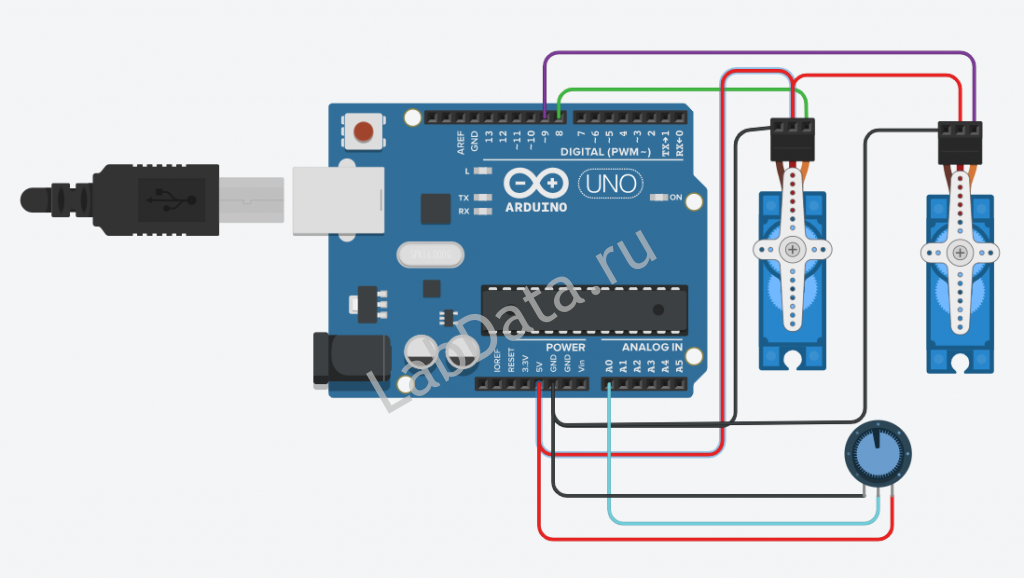 Подключение двух сервоприводов и датчика к Ардуино
Подключение двух сервоприводов и датчика к Ардуино
Алгоритм реализован в программе Ардуино:
// Управление сервоприводами с датчика
// (с) Роман Исаков, 2020
// (с) LabData.ru
#include <Servo.h>
#define servo_speed 200 // Установка скорости работы
#define servo1_pin 8 // Выход 1 сервы
#define servo2_pin 9 // Выход 2 сервы
uint32_t servo_T = 0;
#define DAT_pin A0 // Вход потенциометра
Servo servo1;
Servo servo2;
void setup() {
servo1.attach(servo1_pin);
servo2.attach(servo2_pin);
servo_T = millis();
}
void loop() {
if (millis() - servo_T >= servo_speed) {
servo_T = millis();
int DAT = analogRead(DAT_pin); // Получение аналогового сигнала с потенциометра
servo1.write(map(DAT, 0, 1024, 90, 180)); // Преобразование уровня напряжения от 0..1024 в угол от 90 до 180* и отправка на 1 серву
servo2.write(map(DAT, 0, 1024, 90, 0)); // Преобразование уровня напряжения от 0..1024 в угол от 90 до 0* и отправка на 2 серву
}
}
Поворачивая ручку потенциометра сервоприводы приведутся в движение и станут следить за углом поворота.
Двухходовой клапан с сервоприводом: основная информация
Основное отличие этого клапана от других состоит в том, что он пропускает воду или другой состав, только в одном направлении. Клапан нужен, чтобы обеспечить регулирование подачи и отвода воды из системы.
Использование двухходового клапана с сервоприводом позволяет регулировать температуру в помещении более эффективно
Существует 2 типа запорного механизма в двухходовых клапанах – с помощью штока, опускающегося вертикально или с помощью шара с отверстием в центре. Все движения регулируются датчиками, а приводятся в действие электрическими или пневматическими приводами.
Данные клапаны изготавливаются из различных типов металла: латунь, чугун, сталь.
Чугунные и стальные клапаны чаще всего предназначены для большого объема перекачивания воды или пара. Латунные имеют небольшие габариты и используются в небольших зданиях и помещениях.
Перед установленным клапаном обязательно следует поставить фильтр, это продлит срок службы элемента.
Конструкция
Устройство современных сервоприводов достаточно просто и при этом эффективно, так как создает условия для точного регулирования их работы. Конструкция включает:
- привод. Это может быть электродвигатель с редуктором или пневмоцилиндр. Редуктор необходим для уменьшения скорости вращения мотора до тех значений, которые нужны в работе. К выходному валу редуктора прилагается требуемая нагрузка: качалка, вращающийся вал, тянущие или толкающие устройства;
- датчик обратной связи. В качестве него выступает датчик угла поворота выходного вала (энкодер) или потенциометр. Функция – преобразование угла поворота в электрический сигнал;
- блок питания и управления (сервоусилитель, преобразователь частоты, инвертор). Данный элемент принимает и анализирует управляющие импульсы, сравнивает их с показателями датчика, отвечает за пуск и остановку двигателя. В состав блока управления может входить конвертер (датчик управляющего сигнала или воздействия).
Принцип работы цифровой конструкции
Цифровыми устройствами используется специальный процессор, функционирующий на высоких частотах. Он обрабатывает сигнал приемника и посылает импульсы управления в двигатель с показателем частоты в 300 раз в секунду. Так как показатель частоты значительно выше, то и реакция заметно быстрее и держит позицию лучше. Это вызывает оптимальное центрирование и высокий уровень кручения. Но такой метод требует больших затрат энергии, поэтому батарея, используемая в аналоговом механизме, в этой конструкции будет разряжаться намного быстрее.
Однако все пользователи, которые хоть однажды столкнулись с цифровой моделью, говорят о том, что ее различие с аналоговой конструкцией настолько значительно, что они никогда бы больше не употребляли последнюю.
Сервопривод для Ардуино
Сервопривод – это такой вид привода, который может точно управлять параметрами движения. Другими словами, это двигатель, который может повернуть свой вал на определенный угол или поддерживать непрерывное вращение с точным периодом.
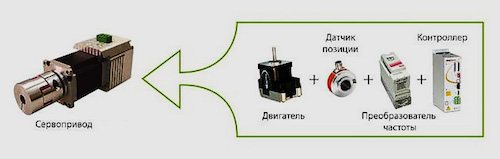
 Схема работы сервопривода основана на использовании обратной связи (контура с замкнутой схемой, в котором сигнал на входе и выходе не согласован). В качестве сервопривода может выступать любой тип механического привода, в составе которого есть датчик и блок управления, который автоматически поддерживает все установленные параметры на датчике. Конструкция сервопривода состоит из двигателя, датчика позиционирования и управляющей системы. Основной задачей таких устройств является реализация в области сервомеханизмов. Также сервоприводы нередко используются в таких сферах как обработка материалов, производство транспортного оборудования, обработка древесины, изготовление металлических листов, производство стройматериалов и другие.
Схема работы сервопривода основана на использовании обратной связи (контура с замкнутой схемой, в котором сигнал на входе и выходе не согласован). В качестве сервопривода может выступать любой тип механического привода, в составе которого есть датчик и блок управления, который автоматически поддерживает все установленные параметры на датчике. Конструкция сервопривода состоит из двигателя, датчика позиционирования и управляющей системы. Основной задачей таких устройств является реализация в области сервомеханизмов. Также сервоприводы нередко используются в таких сферах как обработка материалов, производство транспортного оборудования, обработка древесины, изготовление металлических листов, производство стройматериалов и другие.
В проектах ардуино робототехники серво часто используется для простейших механических действий:
- Повернуть дальномер или другие датчики на определенный угол, чтобы измерить расстояние в узком секторе обзора робота.
- Сделать небольшой шаг ногой, движение конечностью или головой.
- Для создания роботов-манипуляторов.
- Для реализации механизма рулевого управления.
- Открыть или закрыть дверку, заслонку или другой предмет.
Конечно, сфера применения серво в реальных проектах гораздо шире, но приведенные примеры являются самыми популярными схемами.
Как подключить джойстик модуль к Ардуино
07.06.2013 20:14:00
В данной статье разберем устройство, приведем примеры программного кода для работы с джойстиком, а в конце, в качестве усложненного примера, поуправляем двумя сервоприводами с джойстика.
Компоненты для повторения (купить в Китае):
Arduino UNO, либо Arduino Nano, либо Arduino Mega
Джойстик
Перемычки
Сервопривод SG90
Похожие вещи:
Шилд джойстик для платы Arduino
Рука на Arduino
Подключение к Arduino
Итак, по направлениям отклонения H (horizontal) и V (vertical), на плате джойстика установлены два потенциометра. Основываясь на их показаниях джойстик отслеживает отклонения влево, вправо, вверх, вниз и выдает аналоговый сигнал от 0 до 1023.
Ось Z посажена на кнопку и выдает цифровой сигнал (вкл/выкл).
Джойстик модуль имеет пятипиновый разъем стандарта 2.54мм:
VCC: “+” питания.
V: Вывод выходного аналогового сигнала по оси Y
H: Вывод выходного аналогового сигнала по оси X
KEY: Вывод выходного сигнала с кнопки
GND: “-” питания
Подключение модуля предельно просто:
VCC на + 5 Вольт Arduino.
GND на любой из GND пинов Arduino.
H и V на любые аналоговые входы Arduino (в примере H подсоединен к A4, V к A5).
KEY к любому цифровому пину Arduino (в примере подсоединено к D2).
Подключив модуль к Arduino остается лишь залить скетч для работы. В приведенном ниже скетче значения получаемые с потенциометров и кнопки будут отсылаться в последовательный порт компьютер
пример программного кода:
const int Y_PIN = 5; // Потенциометр оси Y подключен к аналоговому входу 5 const int X_PIN = 4; // Потенциометр оси X подключен к аналоговому входу 4сonst int BUTTON_PIN = 2; // Кнопка подключена к цифровому выводу 2 float stepSize = 180F / 1024; // Вычисляем шаг. градусы / на градацию // Угол поворота джойстика 180 градусов, АЦП выдает значения от 0 до 1023, всего 1024 градации void setup(){Serial.begin(9600); // Скорость работы с монитором порта } void loop(){int yVal = analogRead(Y_PIN); // Задаем переменную yVal для считывания показаний аналогового значенияint xVal = analogRead(X_PIN);float yAngle = yVal * stepSize; // Переводим выходные данные yVal в угол наклона джойстика (от 0 до 180)float xAngle = xVal * stepSize; // Аналогично xValboolean isNotClicked = digitalRead(BUTTON_PIN); // Считываем не было ли нажатия на джойстикSerial.print(“Horisontal angle = “); // Выводим текст Serial.println(xAngle); // Выводим значение угла Serial.print(“Vertical angle = “);Serial.println(yAngle);if (!isNotClicked){Serial.println(“Clicked”);}delay(1000);}
Открыв монитор порта мы видим значения которые выдает наш джойстик. Опираясь на эти данные уже можно собрать что-то интересное.
https://youtube.com/watch?v=OsH-V8Uu5-w
Для большей наглядности подключим 2 сервопривода (D9, D10) и пищалку (D12).При включении дуины сервоприводы принимают положение 90°. Одна отвечает за отклонения по оси X, вторая по оси Y. При нажатии на кнопку срабатывает пищалка.
#include Servo servo1;Servo servo2;const int Y_PIN = 5; // Потенциометр оси Y подключен к аналоговому входу 5 const int X_PIN = 4; // Потенциометр оси X подключен к аналоговому входу 4const int BUTTON_PIN = 2;const int SERVO1_PIN = 9;const int SERVO2_PIN = 10;const int LED_PIN = 13;float stepSize = 180F / 1024; // Вычисляем шаг. градусы / на градацию // Угол поворота джойстика 180 градусов, АЦП выдает значения от 0 до 1023, всего 1024 градации void setup(){ pinMode(LED_PIN, OUTPUT); servo1.attach(SERVO1_PIN); servo2.attach(SERVO2_PIN);} void loop(){ int yVal = analogRead(Y_PIN); // Задаем переменную yVal для считывания показаний аналогового значения int xVal = analogRead(X_PIN); float yAngle = yVal * Step; // Переводим выходные данные yVal в угол наклона джойстика (от 0 до 180) float xAngle = xVal * Step; // Аналогично xVal servo1.write(yAngle); // Задаем сервоприводу полученный угол servo2.write(xAngle); boolean isClicked = digitalRead(BUTTON_PIN); if (isClicked) { digitalWrite(LED_PIN, HIGH); } else { digitalWrite(LED_PIN, LOW); }}
Набор для сборки 2ух осевого вращателя
Использованное в статье железо:
Плата Arduino, Сенсор шилд, Джойстик модуль, Пишалка модуль, Сервоприводы mini 9G
Соединительные провода “мама-мама”
Купить в России джойстик модуль
В данный момент еще реализованы не все элементы нашего сообщества. Мы активно работаем над ним и в ближайшее время возможность комментирования статей будет добавлена.
Виды
Сервоприводы вращательного движения. Чаще всего используются в полиграфических, упаковочных станках, авиамоделировании. Делятся на:
- синхронные – дают возможность точно задавать степень поворота (с точностью до угловых минут), скорость, ускорение. Достигают максимальных оборотов быстрее асинхронных, дороже их в несколько раз;
- асинхронные — позволяют точно выполнять команды скорости даже на малых оборотах.
Сервоприводы линейного движения. Данные устройства могут развивать значительную скорость (до 70 м/с²), что делает их востребованными в автоматах монтажа электронных деталей на печатную плату. Делятся на плоские и круглые модели.
Также сервоприводы классифицируются по принципу действия на электромеханические, где движение обеспечивают мотор и редуктор, и электрогидромеханические, где действует система ил поршня и цилиндра. Вторая группа устройств дает более высокие показатели быстродействия.
Для чего нужна регулировка?
Подстройка оптимальной температуры батарей отопления позволяет создать комфортный микроклимат в доме, который будет радовать Вас долгие годы. Регулировка позволяет:
- Добиться дополнительной экономии на отоплении. За счет того, что радиаторы в определенный момент перекрываются для подачи теплоносителя, мы экономим на том, что не нагреваем лишний прибор отопления.
- Не открывать постоянно окна когда жарко и закрывать когда холодно
- Добиться балансировки системы отопления и каждый прибор будет эффективно работать
Это интересно: Не греет полотенцесушитель — все причины и варианты решения проблемы
Виды термоголовок и принцип их работы
Термоголовки относятся к запорно-регулирующей арматуре.
Существует три вида термостатических головок:
- ручные;
- механические;
- электронные.
Функции во всех одинаковые, но способы реализации отличаются. В зависимости от последнего параметра они обладают разными возможностями.
Что представляют собой ручные термоголовки?
По конструктивному исполнению термостатические головки дублируют стандартный кран. Путем поворота регулятора, можно регулировать объем теплоносителя, транспортируемого по трубопроводной магистрали.
Настроив термостат всего на 1° ниже, за год вы сможете сэкономить 6% от суммы, которую вам приходится платить за электроэнергию за год
Монтируют их вместо шаровых кранов по противоположным сторонам от радиатора. Они надежные и недорогие, но управлять ими придется вручную, а крутить каждый раз вентиль, полагаясь исключительно на свои ощущения, не очень комфортно. В основном такие термоголовки устанавливают на чугунные батареи.
Если переключать шток клапана несколько раз в день, маховик вентиля ослабнет. В результате термоголовка быстро выйдет из строя.
Особенности механических термоголовок
Термоголовки механического типа имеют более сложную конструкцию и установленную температуру они поддерживают в автоматическом режиме.
В основе устройства — сильфон в виде небольшого гибкого цилиндра. Внутри него температурный агент в жидком либо газообразном виде. Как правило, он обладает высоким значением коэффициента теплового расширения.
Как только заданный температурный показатель превышает норму, под влиянием внутренней среды, сильно увеличившейся в объеме, шток начинает двигаться.
В результате сечение проходного канала термоголовки сужается. При этом происходит уменьшение пропускной способности батареи, а, следовательно, и температуры теплоносителя до установленных параметров.
По мере остывания жидкости или газа в сильфоне, цилиндр теряет свой объем. Шток поднимается, увеличивая дозу теплоносителя, проходящего через радиатор. Последний понемногу разогревается, равновесие системы восстанавливается и все начинается сначала.
Положительный результат будет только тогда, когда терморегуляторы имеются во всех комнатах и на каждом радиаторе.
Более популярны устройства с сильфонами, наполненными жидкостью. Хотя у газов реакция и более быстрая, но технология их производства довольно сложная, а разница в точности измерения составляет всего 0,5%.
Механический регулятор в использовании более удобен, чем ручной. Он полностью отвечает за микроклимат в помещении. Существует много моделей такого термоклапана, отличающихся друг от друга способом подачи сигнала
Термостатическую головку монтируют так, чтобы она была ориентирована в сторону помещения. Это повысит точность измерения температуры.
Если для такой установки нет условий, монтируют терморегулятор с выносным датчиком. С термоголовкой его соединяет капиллярная трубка длиной от 2 до 3 м.
Целесообразность применения выносного датчика обусловлена следующими обстоятельствами:
- Отопительный прибор помещен в нишу.
- Радиатор имеет размер в глубину 160 мм.
- Термоголовка скрыта за жалюзи.
- Большая ширина подоконника над радиатором, при том что дистанция между ним и верхом батареи меньше 100 мм.
- Устройство балансировки расположено вертикально.
Все манипуляции с радиатором будут выполняться с ориентацией на температуру в комнате.
Чем отличаются электронные термоголовки?
Так как, кроме электроники, в таком терморегуляторе имеются батарейки (2 шт.), по размерам он превосходит предыдущие. Шток здесь движется под влиянием микропроцессора.
У этих приборов большой комплект дополнительных функций. Так, они могут выставлять температуру по часам — ночью в комнате будет прохладней, а к утру температура повысится.
Есть возможность программировать температурные показатели по отдельным дням недели. Не снижая уровень комфорта, можно значительно экономить на обогреве дома.
Хотя заряда батарей достаточно для эксплуатации на протяжении нескольких лет, за ними все же нужно следить. Но главный минус не в этом, а в высокой цене электронных термоголовок.
На фото термоголовка с выносным вариантом датчика. Он ограничивает температуру до установленного значения. Регулировка возможна в пределах от 60 до 90°
Если на радиатор установлен декоративный экран, термоголовка будет бесполезной. В этом случае потребуется регулятор с датчиком, фиксирующим внешнюю температуру.
Это интересно: Как подключить терморегулятор для батарей отопления: порядок монтажа
Виды сервоприводов
Сервоприводы бывают аналоговые и цифровые. Различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостаток — дороговизна.
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. У бесколлекторных моторов нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Ход работы: как правильно установить термоголовку на радиатор
Чаще всего подключение термоголовки проводится с установкой новых батарей для отопления. Как правило, новые радиаторы устанавливаются до начала отопительного сезона.
Установка термоголовки:
- В местах, где головка будет соединяться с радиаторами, на трубах сделать резьбу с помощью плашки.
- На часть трубы, которая выходит от стояка, нужно закрепить контрагайку. На нее намотать уплотнитель для резьбы – фумленту.
- Накрутить термоголовку, но не сильно затягивать ее.
- На трубу, ведущую к радиатору накрутить контрагайку и совместить ее с головкой.
- Плотно затянуть гайки с трубами – одновременно зажать их с помощью разводных ключей.

После установки устройства нужно проверить его на корректность работы. Для этого сперва нужно включить устройство на максимум. Разместив посредине комнаты термометр, понаблюдайте за повышением температуры.
После того, как температура в помещении повыситься, поверните вентиль в обратную сторону и ожидайте желаемого показание термометра, например 20 градусов. Когда увидите нужную температуру, медленно поверните кран на увеличение температуры, пока в корпусе не зашумит вода. На ручке можно сделать пометку –это положение регулятора соответствует оптимальной температуре.
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия — например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом — при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые — контроллеры.
Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей — с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни
В более дорогих моделях можно найти элементы из карбона и даже титана.
Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.
Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни — самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания
Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения
Как работает сервопривод
Вращение выходного вала редуктора, связанного шестернями с сервоприводом, осуществляется путем запуска и остановки электродвигателя. Сам редуктор необходим для регулировки числа оборотов. Выходной вал может быть соединен с механизмами или устройствами, которыми необходимо управлять. Положение вала контролируется с помощью датчика обратной связи, способного преобразовывать угол поворота в электрические сигналы и на котором построен принцип работы всего устройства.
Этот датчик известен также, под названием энкодера или потенциометра. При повороте бегунка, его сопротивление будет изменяться. Изменения сопротивления находится в прямой пропорциональной зависимости с углом поворота энкодера. Данный принцип работы позволяет устанавливать и фиксировать механизмы в определенном положении.
Дополнительно каждый серводвигатель имеет электронную плату, обрабатывающую внешние сигналы, поступающие от потенциометра. Далее выполняется сравнение параметров, по результатам которого производится запуск или остановка электродвигателя. Следовательно, с помощью электронной платы поддерживается отрицательная обратная связь.

Подключить серводвигатель можно с помощью трех проводников. По двум из них подается питание к электродвигателю, а третий служит для прохождения сигналов управления, приводящих вал в определенное положение.
Предотвратить чрезмерные динамические нагрузки на электродвигатель возможно с помощью плавного разгона или такого же плавного торможения. Для этого применяются более сложные микроконтроллеры, обеспечивающие более точный контроль и управление позицией рабочего элемента. В качестве примера можно привести жесткий диск компьютера, в котором головки устанавливаются в нужную позицию с помощью точного привода.
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
-
красный — питание; подключается к контакту 5V или напрямую к источнику питания
-
коричневый или чёрный — земля
-
жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода: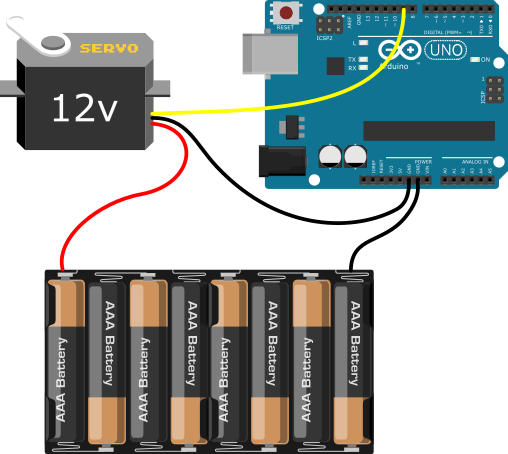
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Пример использования библиотеки Servo
servo_example.ino// подключаем библиотеку для работы с сервоприводами#include <Servo.h> // создаём объект для управления сервоприводомServo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9);} void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500);}
По аналогии подключим 2 сервопривода
2servo_example.ino// подключаем библиотеку для работы с сервоприводами#include <Servo.h> // создаём объекты для управления сервоприводамиServo myservo1;Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12);} void loop() { // устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo1.write(); myservo2.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo1.write(180); myservo2.write(180); delay(500);}
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
servo2_example.ino// подключаем библиотеку для работы с сервоприводами// данная библиотека совместима с библиотекой «VirtualWire»// для работы с приёмником и передатчиком на 433 МГц#include <Servo2.h> // создаём объект для управления сервоприводомServo2 myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9);} void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500);}
Как работает сервопривод
Принцип его действия завязан на использовании импульсного сигнала, обладающего тремя ключевыми свойствами, – частотой, наименьшей и наивысшей продолжительностью, и как раз последняя, то есть длина, и задает угол поворота. Может находиться в диапазоне 0,8-2,2 мс. Как только поступает на печатную плату, активирует энкодер (потенциометр) и, через механическую передачу, выходной вал.
Электронная схема сравнивает реальное положение вала с запрограммированным. При этом возможно 3 состояния. И первое из них – нулевой момент, то есть полного совпадения, что значит – силовой агрегат не работает (остановлен). При втором управляющий сигнал выше опорного, это провоцирует поворот в одну сторону, при третьем – ниже, что оборачивается движением вращающейся части в другом направлении.
Таким образом, принцип работы сервомотора сводится к следующему:
- привод получает импульс на вход, допустим, команду изменения угла;
- блок управления соотносит полученный сигнал с фактическими значениями, снятыми датчиком;
- исходя из результатов анализа, данная плата выдает команду – перемещения по какому-то вектору, ускорения или замедления, – причем обязательно направленную на то, чтобы привести реальную цифру к заданной и необходимой.
Сравнение осуществляется на основании разностных величин и учитывает параметр длительности, а поэтому определяет разбежку показателей с максимальной точностью. Эта особенность дает возможность обеспечить необходимое позиционирование инструмента.
Управление сервоприводом потенциометром
Ардуино позволяет не только управлять, но и считывать показания с сервопривода. Команда myservo.read(0) считывает текущий угол поворота вала сервопривода и его мы можем увидеть на мониторе порта. Предоставим более сложный пример управления сервоприводом потенциометром на Ардуино. Соберите схему с потенциометром и загрузите скетч в Ардуино для управления сервоприводом.
Пояснения к коду:
Заключение. Сервомоторы часто используются в различных проектах на Ардуино для различных функций: повороты конструкций, движение частей механизмов. Так как серво Arduino постоянно стремится удерживать заданный угол поворота, то будьте готовы к повышенному расходу электроэнергии. Это будет особенно чувствительно в автономных роботах, питающихся от аккумуляторов или батареек.
Источник
Похожие записи:
 Микрофонный предусилитель своими руками схема
Микрофонный предусилитель своими руками схема
 Лучшие проекторы звездного неба для дома на 2021год
Лучшие проекторы звездного неба для дома на 2021год
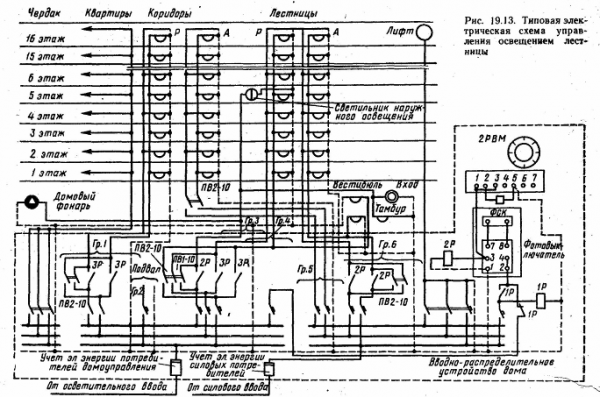 Принципиальные и монтажные электрические схемы
Принципиальные и монтажные электрические схемы
 Как делается автоматика для откатных ворот своими руками
Как делается автоматика для откатных ворот своими руками
 Какие бывают виды освещения? обзор основных видов источника света их классификация и нюансы применения (видео + 125 фото)
Какие бывают виды освещения? обзор основных видов источника света их классификация и нюансы применения (видео + 125 фото)
 Как избавиться от запаха гари в квартире быстро
Как избавиться от запаха гари в квартире быстро