Типы приборов
Устройства бывают нескольких типов. Типы энкодеров: инкрементальные и абсолютные, оптические и механические. Далее будет рассмотрено, что такое энкодер инкрементального типа, а затем обозрены другие типы.
Инкрементальные энкодеры
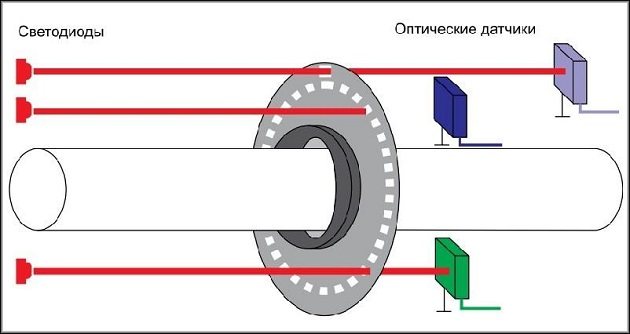
Они распространены больше всего. В инкрементальном варианте вращательное движение вала преобразовывается в электрические импульсы. Его конструкция состоит из диска с прорезями и оптических датчиков.
Конструкция датчиков поворота данного типа, не позволяет им сообщать свое абсолютное состояние, а только величину изменения положения. Простой образец инкрементального устройства — шайба регулировки громкости автомобильной магнитолы.
Этот вид работает следующим образом. У него есть начальная нуль-метка, или выход Z, и два дополнительных выхода — A и B. Датчик создает две линии сигналов со смещенными на четверть фазы импульсами относительно друг друга. Разница импульсов указывает на направление вращения, а их количество — на угол поворота.

Разновидность инкрементальных энкодеров — сдвоенные, или квадратурные. Они состоят из двух датчиков, которые срабатывают со смещением в полшага. Квадратурные считают количество импульсов и учитывают направление.
У инкрементальных два главных минуса. Во-первых, нужно постоянно обрабатывать и анализировать сигнал, для чего используют контроллер и специальную программу. Во-вторых, они требуют синхронизации с нулевой меткой после включения. Для этого требуется инициализация для поиска выхода Z.
Абсолютные энкодеры
Датчики такого типа устроены более сложно. Но они позволяют определить величину угла поворота сразу после включения, не требуя синхронизации с нулевой меткой.
В основе конструкции поворотный круг, разделенный на одинаковые по размеру пронумерованные секторы. После включения устройства определяется номер сектора, на котором оно находится. Такое решение позволяет сразу зафиксировать положение, угол и направление вращения.
Принцип работы абсолютного энкодера основан на использовании кода Грея для определения текущего положения и других параметров. В них не требуется синхронизация с нулевым значением.
Единственный существенный недостаток этого типа угловых датчиков — необходимость все время переводить код Грея в двоичный код для регистрации положения датчика.
Многооборотные датчики поворота
Абсолютные энкодеры могут быть однооборотными и многооборотными.
Однооборотные показывают абсолютное значение после одного оборота. После этого код возвращается к начальному значению. Такие датчики используют в основном для измерения угла поворота.
Если нужно измерять обороты в системах с линейным перемещением, используют многооборотные энкодеры. В них есть дополнительный передаточный механизм, благодаря чему они регистрируют, помимо угла поворота, количество оборотов.
Оптические энкодеры
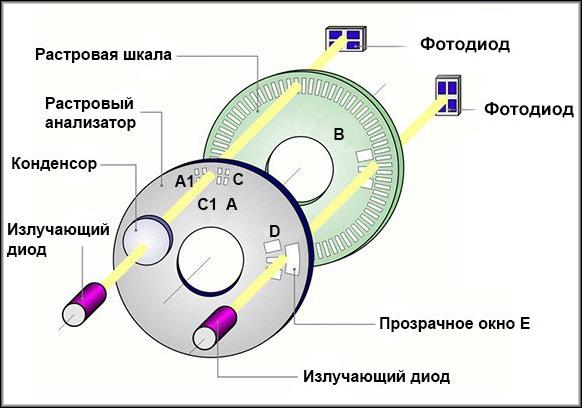
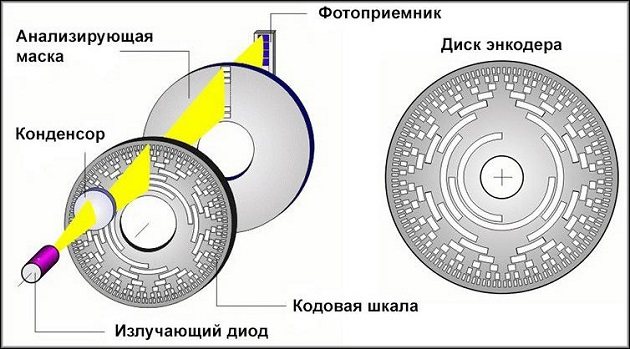
Диск оптического энкодера изготавливают из стекла. Отличие этого типа угловых датчиков, в наличии оптического растора, перемещающегося при вращении вала. При этом он создает поток света, который регистрирует фотодатчик.
Каждому положению энкодера соответствует определенный цифровой код, который вместе с количеством оборотов составляет единицу измерения устройства.
Оптические угловые датчики бывают фотоэлектрическими и магнитными.
В основе работающих датчиков лежит магнитный эффект Холла. Их точность и разрешение ниже, однако, и конструкция проще. Они лучше переносят сложные условия работы и занимают меньше места.
Фотоэлектрические датчики основаны на том же принципе. В них свет преобразуется в электрические сигналы.
Механические энкодеры
Также называются аналоговыми. Их диск изготавливают из диэлектрика и наносят на него выпуклые или непрозрачные области. Набор контактов и переключателей, позволяет вычислить значение абсолютного угла. Механические энкодеры также используют код Грея.
Один из недостатков этих энкодеров в том, что со временем контакты разбалтываются. В результате сигнал искажается, и прибор выдает неточные значения. А это сказывается на общей работоспособности. Оптические и магнитные энкодеры не имеют такого недостатка.
Типы приборов
Устройства бывают нескольких типов. Типы энкодеров: инкрементальные и абсолютные, оптические и механические. Далее будет рассмотрено, что такое энкодер инкрементального типа, а затем обозрены другие типы.
Инкрементальные энкодеры
Они распространены больше всего. В инкрементальном варианте вращательное движение вала преобразовывается в электрические импульсы. Его конструкция состоит из диска с прорезями и оптических датчиков.
Конструкция датчиков поворота данного типа, не позволяет им сообщать свое абсолютное состояние, а только величину изменения положения. Простой образец инкрементального устройства — шайба регулировки громкости автомобильной магнитолы.
Абсолютный энкодер устройство

Рисунок 3. Абсолютный энкодер У этого типа ДУПа его поворотный круг поделён на определённые пронумерованные сектора, обычно идентичного размера. Во время работы он выдаёт конкретный секторный номер, в котором он непосредственно и находится. Именно поэтому данное устройство называют абсолютным. Благодаря его устройству можно легко определить угол/положение/направление энкодера относительно начального (нулевого) сектора.
Помимо этого абсолютный датчик угла не требует присоединения систем отсчёта к какому-нибудь нулевому значению. В нём используется специальный код Грея, позволяющий не допустить ошибки при работе. Из недостатков можно выделить только то, что микроконтроллер будет вынужден постоянно его переводить в двоичный код, чтобы выяснить положение ДУПа.
Выбор лучших энкодеров для Ардуино
Чтобы упростить процесс выбора энкодера к Arduino, здесь будет подборка каждого варианта.
Поворотный энкодер EC11

Нужен простой угловой энкодер, который поможет начать распознавать вращающийся вал с помощью Ардуино? Тогда стоит выбрать EC11.
Устройство имеет в общей сложности 5 контактов, 3 с одной стороны для вращательного кодирования, которым требуется простая цепь для подачи постоянного тока 5В. Два других замыкаются при нажатии, поэтому нет недостатка в какой-либо функциональности при использовании этого энкодера с Ардуино.
Магнитный энкодер Grove AS5600
Нужно устройство, которое может одновременно работать как магнитный потенциометр или магнитный энкодер с отличной надежностью и долговечностью? Тогда это устройство отлично подойдет.
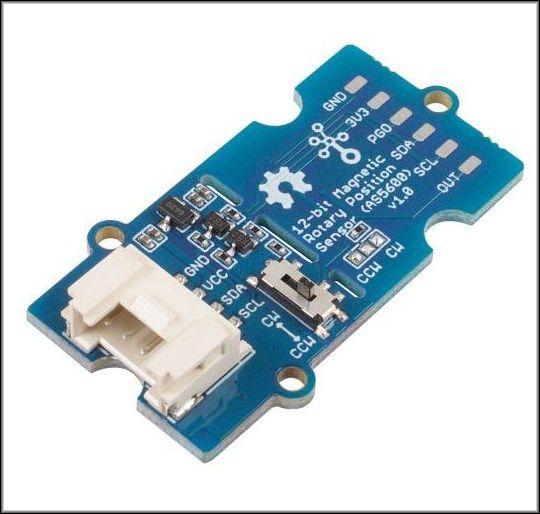
Оно не только работает в обоих направлениях, но по сравнению с традиционным энкодером/потенциометром, Grove AS5600 бесконтактный, без ограничения угла поворота, обеспечивает высокоточный сигнал. Все это стало возможным благодаря встроенному AS5600, основанному на эффекте Холла.
Grove — оптический поворотный прибор
Этот оптический датчик угла поворота (для уно, нано и других) включает в себя инфракрасный излучатель и два фототранзисторных детектора. Подходит не только для определения скорости/вращения, но и для определения направления вращения.
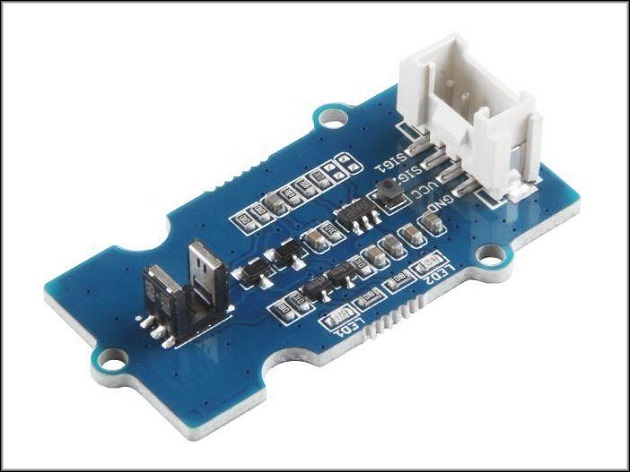
Его особенности:
- двойные фототранзисторные детекторы, могут определять направление вращения;
- встроенные светодиодные индикаторы;
- интерфейс Grove для простоты использования с Ардуино.
Область применения энкодеров в промышленности
Датчики угла поворота незаменимы в современной промышленности. Промышленные системы, как правило, включают в себя множество разнообразных энкодеров, позволяющих контролировать работу станков, приборов, оборудования и решать огромное число разнообразных задач:
- точное измерение угла поворота вращающегося объекта,
- измерение вращения, поворота и наклона текущего положения объекта,
- контроль положения вращающихся объектов,
- контроль точности вращения объектов,
- регистрация измерений и многие другие.
Благодаря большому разнообразию существующих моделей энкодеров и их совместимости со многими видами промышленного оборудования, датчики угла поворота могут применяться в различных отраслях промышленности:
- в машиностроении, станкостроении, приборостроении для контроля работы станков и оборудования,
- для контроля перемещения конвейерной и транспортерной ленты в металлургии, горнодобывающей отрасли, пищевой и других промышленностях,
- в измерительных приборах в промышленности, сфере ЖКХ, полевых и лабораторных исследованиях,
- в автомобилестроении и транспортной отрасли для контроля положения рулевого колеса, контроля вращения валов и других задач,
- в компьютерной отрасли,
- в системах автоматизации управления практически в любых отраслях промышленности.
Приведенные примеры не ограничивают возможности применения датчиков угла поворота, современные энкодеры широко применяются во многих других промышленных областях.
Source Code
Here’s the Arduino code:
/* Arduino Rotary Encoder Tutorial
*
* by Dejan Nedelkovski, www.HowToMechatronics.com
*
*/
#define outputA 6
#define outputB 7
int counter = 0;
int aState;
int aLastState;
void setup() {
pinMode (outputA,INPUT);
pinMode (outputB,INPUT);
Serial.begin (9600);
// Reads the initial state of the outputA
aLastState = digitalRead(outputA);
}
void loop() {
aState = digitalRead(outputA); // Reads the "current" state of the outputA
// If the previous and the current state of the outputA are different, that means a Pulse has occured
if (aState != aLastState){
// If the outputB state is different to the outputA state, that means the encoder is rotating clockwise
if (digitalRead(outputB) != aState) {
counter ++;
} else {
counter --;
}
Serial.print("Position: ");
Serial.println(counter);
}
aLastState = aState; // Updates the previous state of the outputA with the current state
}
Description of the code: So first we need to define the pins to which our encoder is connected and define some variables needed for the program. In the setup section we need to define the two pins as inputs, start the serial communication for printing the results on the serial monitor, as well as read the initial value of the output A and put the value into the variable aLastState.
Then in the loop section we read the output A again but now we put the value into the aState variable. So if we rotate the encoder and a pulse is generated, these two values will differ and the first “if” statement will become true. Right after that using the second “if” statement we determine the rotation direction. If the output B state differ from the output A state the counter will be increased by one, else it will be decreased. At the end, after printing the results on the serial monitor, we need to update the aLastState variable with aState variable.
That’s all we need for this example. If upload the code, start the Serial Monitor and start rotating the encoder we will start getting the values in the serial monitor. The particular module that I have makes 30 counts each full cycle.
Чтение порта микроконтроллера и программная защита от помех (цифровой фильтр)
Рассмотрим обработку порта PА.
Всего энкодер EP50S8-720-2F-N-5 имеет 10 проводников (разрядность 10 бит) для обеспечения 720 чисел на 1 оборот. Теперь будет читать каждый из разрядов порта (не забудем выполнить инверсию порта ~GPIOA->IDR — т.к. у нас выполнена подтяжка резисторами к питанию). Младший разряд, подключаемый к PA4 мы сдвигаем на 4 разряда вправо для получения правильного конечного числа (GPIO_IDR_IDR4>>4). И самый старший разряд мы сдвигает влево на 9 (GPIO_IDR_IDR0<<9), т.к. соответствующий провод энкодера подключен к PA0, а должен соотноситься к 10 биту. Можно было бы подключить какой-либо провод к другому порту, например PВ и выполнить процедуру чтения из ноги PB0: ((~GPIOВ->IDR & GPIO_IDR_IDR0)<<9). В этом заключается универсальность процедуры чтения.
Цикл for(uint8_t i = 0; i <= 200; i++) необходим для 200-кратного подтверждения установки значения энкодера равного 55. Это своеобразный цифровой фильтр от помех, которые неизбежно могут возникнуть в 10 проводной параллельной линии связи.
Можно было бы воспользоваться сдвиговыми регистрами и считывать число в микроконтроллер STM32 по SPI протоколу. Но это уже другая история.
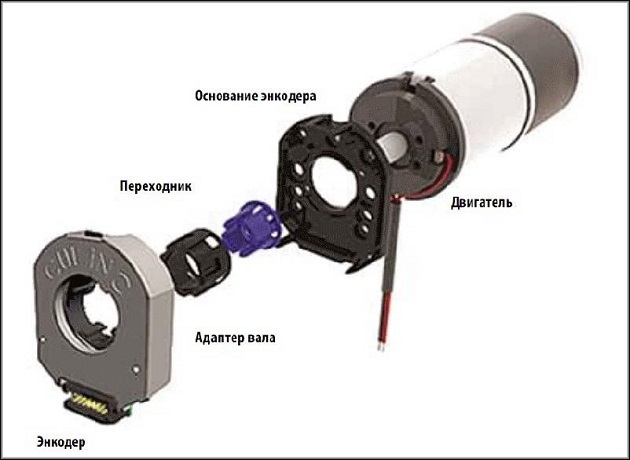
Монтаж и подключение датчиков поворота
Как правило, энкодеры устанавливают на валах, с которых нужно считывать информацию. Чтобы компенсировать различия в размерах, используют переходные муфты
Важно прочно закрепить корпус датчика при монтаже
Чаще всего угловые энкодеры работают вместе с контроллерами. Преобразователь подключают к нужным выходам. Затем программа определяет положение объекта в текущий момент, его скорость и ускорение.
Варианты подключения
В самом простом варианте, энкодер подключают к счетчику, запрограммированному измерять скорость.
Однако чаще работа энкодера осуществляется вместе с контроллером. Примером служат датчики поворота на валах двигателей, совмещающих какие-либо детали между собой. С помощью вычислений на основе поступающих данных, система отслеживает зазор между деталями. Когда достигнуто некоторое минимальное значение, совмещение деталей останавливается, чтобы их не повредить.
Другой случай — подключение энкодеров на двигателях с частотными преобразователями, где они служат элементами обратной связи. Здесь принцип того, как подключить устройство, еще проще. Датчик угла поворота подключается к ним с помощью платы сопряжения. Это позволяет точно поддерживать скорость и момент двигателя.
При использовании самодельного энкодера, сделанного своими руками, способ подключения может быть другим. Желательно проверить оба перечисленных варианта, доведя устройство до исправной работы.
После подключения желательно проверить все мультиметром.
Программирование энкодера
 Современные энкодеры внутри себя имеют микроконтроллер (процессор) все данные энкодера передаются по цифровому последовательному интерфейсу, наиболее распространённый RS485. В процессоре энкодера хранятся данные о двигателе, в котором этот датчик установлен (ток, напряжение, инерция, угол смещения ротора, индуктивности и естественно тип двигателя с серийным номером).
Современные энкодеры внутри себя имеют микроконтроллер (процессор) все данные энкодера передаются по цифровому последовательному интерфейсу, наиболее распространённый RS485. В процессоре энкодера хранятся данные о двигателе, в котором этот датчик установлен (ток, напряжение, инерция, угол смещения ротора, индуктивности и естественно тип двигателя с серийным номером).
Именно поэтому новые энкодеры просто поставить на оборудование не получится, придется программировать. Программирование энкодера производится с помощью компьютера со специальным программным обеспечением либо с помощью программатора.
Промышленный абсолютный энкодер

Промышленные абсолютные энкодеры служат для точного позиционирования механизмов и, в частности, валов электрических двигателей, в том числе на испытательных стендах для подсчета частоты вращения двигателей.Они бывают инкрементные с простым тиканьем шагов при повороте и абсолютные с выдачей конкретного числа на каждом шаге — угле поворота. Сегодня мы рассмотрим работу с абсолютным энкодером, имеющим разрешение 720 положений. Это соответствует угловому шагу (точности) 360/720 =½ градуса. Абсолютные энкодеры бывают с различными напряжениями питания и интерфейсами подключения. Рассмотрим варианты интерфейсов энкодеров.
Абсолютный энкодер практически не подвержен помехам, если сам не поврежден. Если диск энкодера не может полноценно быть считан (считываются только его старшие разряды) из-за слишком быстрого вращения, то при уменьшении скорости вращения угол поворота будет вычислен точно (будет возможность вычисления младших разрядов). Таким образом, точность считывания положения падает при увеличении скорости вращения вала выше декларируемой. Абсолютный энкодер относительно устойчив к вибрациям ввиду отсутствия подсчета импульсов.
Принцип работы
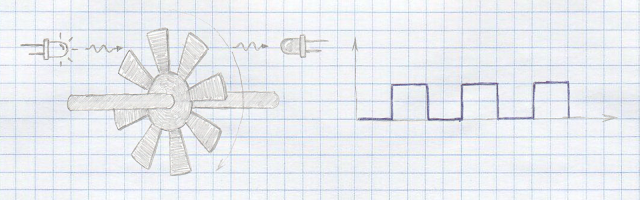
Работу энкодера вращения проще всего объяснить на примере оптического энкодера. Представьте себе вал электродвигателя, на котором закреплен диск с прорезями. С одной стороны диска расположен светоизлучающий элемент, луч света проходит через прорези и регистрируется фотоэлементом, расположенным с другой стороны (устройство, состоящее из спаренных светоизлучающего и принимающего элементов, называется фотопрерыватель). При вращении диска луч прерывается, в результате чего на выходе фотоэлемента мы получим меандр — сигнал прямоугольный формы. И частота меандра будет пропорциональна скорости вращения диска. Таким образом можно судить о скорости вращения вала электродвигателя.
Однако работающее по описанному принципу устройство не способно определить направление вращения. Чтобы исправить это добавим в него второй фотопрерыватель и расположим с некоторым смещением относительно первого. В зависимости от направления вращения диска сигнал на выходе первого фотопрерывателя будет меняться раньше или позже чем сигнал на выходе второго. А значит, анализируя как меняются эти два сигнала, мы можем определить направление вращения.
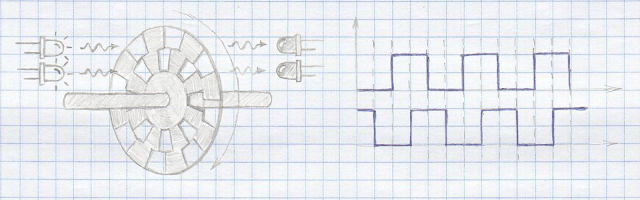
На практике смещения сигналов добиваются не за счет особого расположения фотопрерывателей, а путем добавления второй полосы с прорезями или прозрачными и непрозрачными участками. Участки на двух полосах расположены так чтобы обеспечить сдвиг сигнала по фазе на 90 градусов, поэтому работающие по такому принципу энкодеры называются квадратурными.
На этом же принципе основаны механические энкодеры, только вместо фотопрерывателей в них используются скользящие контакты. Основным недостатком таких энкодеров является дребезг контактов, который может приводить к неправильному подсчету сигналов. Кроме того скользящие контакты подвержены износу. Все это ограничивает область применения механических энкодеров.Магнитные энкодеры строятся на базе магниточувствительных элементов, таких как датчики Холла или магниторезистивные датчики. Они просты в изготовлении, лишены недостатков контактных энкодеров и мало чувствительны к внешним факторам. Но все же проигрывают в точности емкостным, индуктивным и оптическим энкодерам.Емкостные энкодеры имеют в своем составе диск асиметричной формы, который при вращении изменяет емкость между двумя электродами. Это изменение регистрируется и используется для определения углового положения. Емкостные энкодеры так же просты в изготовлении и надежны в эксплуатации, из внешних факторов чувствительны только к изменению влажности.Индуктивные энкодеры работают в магнитном поле и используют явление электромагнитной индукции. Благодаря устойчивости к внешним факторам подходят для использования в неблагоприятной среде, когда другие энкодеры могут оказаться ненадежными.Резистивный энкодер работает по тому же принципу что и обычный потенциометр: электрический сигнал на его выходе пропорционален положению ручки энкодера. Собственно и сами потенциометры могут использоваться для отслеживания углового положения, например, их можно увидеть в сервомашинках:

Дальнейшее описание, включая форму волны энкодера
Ниже приведено изображение, показывающее формы сигналов каналов A и B кодера:
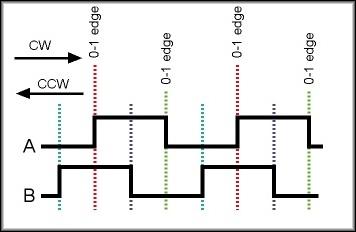
Это может прояснить, как работает выше указанный код. Когда устройство обнаруживает переход от низкого к высокому уровню на канале A, он проверяет, перешел ли канал к B высоким или низким уровням. Затем происходит увеличение/уменьшение переменной, чтобы учесть направление, в котором кодер должен вращаться. Это нужно, чтобы генерировать найденную форму волны. Также на изображении показаны переходы красным или зеленым цветом. Они зависят от того, в каком направлении движется кодировщик.
Одним из недостатков приведенного выше кода является то, что на самом деле он учитывает только одну четверть возможных переходов.
Руководство по энкодерам и тому, как оно подключается к Ардуино, закончилось. Благодаря этому можно получить общее представление о том, что из себя представляют данные устройства, и как они работают.
Подключение поворотного энкодера с Ардуино
Теперь, когда принципы работы различных энкодеров изучены, можно приступить к описанию схемы подключения к Ардуино.
Для этого понадобятся:
- любое устройство Ардуино, например, Arduino UNO, Arduino Mega, Arduino Leonardo, Arduino 101, Arduino Due;
- любой энкодер Ардуино.
Обзор поворотного энкодера
Поворотный энкодер — это датчик, используемый для определения углового положения вала, подобный потенциометру.
Пины, и что они означают:
- CLK: выход A (цифровой);
- DT: выход B (цифровой);
- SW: нажатие кнопки (цифровой);
- + : VCC-напряжение питания;
- GND: заземление.
Поворотный прибор может быть использован в основном для тех же целей, что и потенциометр. Однако потенциометр обычно имеет точку, за которую вал не может вращаться, в то время как энкодер может вращаться в одном направлении без ограничений. Чтобы сбросить показания положения, нужно нажать на вал вниз.
Данное устройство определяет угловое положение вращающегося вала с помощью серии прямоугольных импульсов. Он по существу имеет равномерно расположенные контактные зоны, соединенные с общим узлом, а также два дополнительных контакта, называемых A и B, которые находятся на 90 градусов вне фазы. Когда вал вращается вручную, контакты A и B синхронизируются с общим контактом и генерируют импульс. Подсчитав количество импульсов любого из этих выходов, можно определить положение вращения.
Чтобы определить направление и проверить, вращается ли штифт по часовой стрелке или против часовой стрелки, нужно сделать следующее:
- Если вращающийся вал движется по часовой стрелке, то сигнал A опережает B. В одни и те же моменты времени, A и B будут находиться на противоположных частях прямоугольной волновой функции.
- Если вал движется против часовой стрелки, то сигнал B опережает A.
Подключение
Если говорить в общем, то CLK, DT и SW, должны быть подключены к цифровым выводам на Ардуино, + должен быть подключен к 5V, а GND заземлен.
Пошаговая инструкция подключения проводов энкодера к Ардуино:
- CLK: подключите конец провода к пину CLK на поворотном энкодере, затем к любому цифровому выводу на Arduino (оранжевый провод).
- DT: подключите конец провода к пину DT, затем к любому цифровому контакту на Arduino (желтый провод).
- SW: подключите конец провода к пину SW, далее к любому цифровому контакту на Arduino (голубой провод).
- + : подключите провод к пину +, затем к контакту +5V на Arduino (красный провод).
- GND: подключите конец провода к пину GND на энкодер с контактом GND на Arduino. (Черный провод).
Как кодировать
Код изменяет высоту тона в зависимости от того, в каком направлении повернут энкодер. Когда он поворачивается против часовой стрелки, шаг уменьшается, а когда он поворачивается по часовой стрелке, шаг увеличивается.
Что понадобится:
- датчик поворотного энкодера;
- Ардуино;
- пьезодатчик;
- провода.
Вот сам код:
Описание кода
Итак, сначала нужно определить контакты, к которым подключен кодер, и назначить некоторые переменные, необходимые для работы программы. В разделе «Настройки» нужно определить два контакта в качестве входных данных, и запустить последовательную связь для печати результатов на последовательном мониторе. Также нужно прочитать начальное значение вывода A, затем поместить это значение в переменную aLastState.
Далее в разделе цикла снова изменить вывод A, но теперь поместить значение в переменную aState. Таким образом, если повернуть вал и сгенерировать импульс, эти два значения будут отличаться. Сразу после этого, используя второй параметр «if», определить направление вращения. Если выходное состояние B отличается от A, счетчик будет увеличен на единицу, в противном случае он будет уменьшен. В конце, после вывода результатов на мониторе, нужно обновить переменную aLastState с помощью переменной aState.
Это все, что нужно для этого примера. Если загрузить код, запустить монитор и начать вращать вал, значения станут отображаться на мониторе.
Упрощенный пример
Следующий пример кода продемонстрирует, как считывает сигналы Arduino на датчике энкодера. Он просто обновляет счетчик (encoder0Pos) каждый раз, когда энкодер поворачивается на один шаг, а параметры вращения отправляются на порт ПК.
Код:
Следует обратить внимание на то, что приведенный выше код не является высокопроизводительным. Он предоставлен для демонстрационных целей