Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
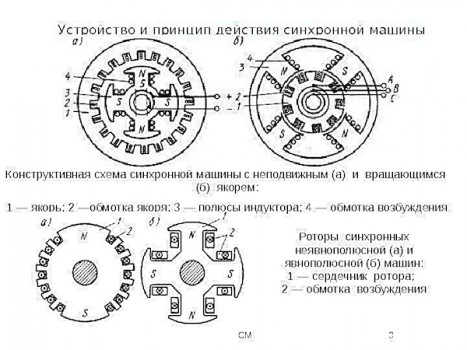
 Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
https://youtube.com/watch?v=xGMwGiPy2aI
https://youtube.com/watch?v=sNzt_CSHe6Q
Отличительные черты асинхронных двигателей
 Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
https://youtube.com/watch?v=hU9krurbi0c
https://youtube.com/watch?v=DX5aMUc4j3E
Области применения, особые свойства и преимущества
Использовать как синхронный конденсатор
V-образная кривая синхронной машины
Изменяя возбуждение синхронного двигателя, он может работать с запаздывающим, опережающим и единичным коэффициентами мощности. Возбуждение, при котором коэффициент мощности равен единице, называется нормальным напряжением возбуждения . Величина тока при таком возбуждении минимальна. Напряжение возбуждения, большее, чем нормальное возбуждение, называется избыточным напряжением возбуждения, напряжение возбуждения, меньшее, чем нормальное возбуждение, называется избыточным напряжением возбуждения. Когда двигатель чрезмерно возбужден, противо-ЭДС будет больше, чем напряжение на клеммах двигателя. Это вызывает эффект размагничивания из-за реакции якоря.
Кривая V синхронной машины показывает зависимость тока якоря от тока возбуждения. С увеличением тока возбуждения ток якоря сначала уменьшается, затем достигает минимума, затем увеличивается. Минимальная точка — это также точка, при которой коэффициент мощности равен единице.
Эта возможность выборочного управления коэффициентом мощности может использоваться для коррекции коэффициента мощности системы питания, к которой подключен двигатель. Поскольку большинство энергосистем любого значительного размера имеют чистый запаздывающий коэффициент мощности, присутствие перевозбужденных синхронных двигателей приближает коэффициент полезной мощности системы к единице, повышая эффективность. Такая коррекция коэффициента мощности обычно является побочным эффектом двигателей, уже присутствующих в системе, для обеспечения механической работы, хотя двигатели могут работать без механической нагрузки просто для обеспечения коррекции коэффициента мощности. На крупных промышленных предприятиях, таких как заводы, взаимодействие между синхронными двигателями и другими отстающими нагрузками может явным образом учитываться при проектировании электрических систем предприятия.
Предел устойчивости установившегося состояния
- Тзнак равноТМаксимумгрех(δ){\ Displaystyle \ mathbf {T} = \ mathbf {T} _ {\ text {max}} \ sin (\ delta)}
куда,
- Т{\ displaystyle \ mathbf {T}} крутящий момент
- δ{\ displaystyle \ delta} угол крутящего момента
- ТМаксимум{\ displaystyle \ mathbf {T} _ {\ text {max}}} максимальный крутящий момент
здесь,
- ТМаксимумзнак равно3VEИксsωs{\ displaystyle \ mathbf {T} _ {\ text {max}} = {\ frac {{\ mathbf {3}} {\ mathbf {V}} {\ mathbf {E}}} {{\ mathbf {X_ { s}}} {\ omega _ {s}}}}}
При приложении нагрузки угол крутящего момента увеличивается. При = 90 ° крутящий момент будет максимальным. Если нагрузка будет приложена и дальше, двигатель потеряет синхронизм, поскольку крутящий момент двигателя будет меньше момента нагрузки. Максимальный момент нагрузки, который может быть приложен к двигателю без потери его синхронизма, называется пределом устойчивости синхронного двигателя в установившемся режиме.
δ{\ displaystyle \ delta}δ{\ displaystyle \ delta}
Другой
Синхронные двигатели особенно полезны в приложениях, требующих точного управления скоростью или положением:
- Скорость не зависит от нагрузки во всем рабочем диапазоне двигателя.
- Скорость и положение можно точно контролировать с помощью элементов управления разомкнутым контуром (например, шаговых двигателей ).
- Приложения с низким энергопотреблением включают в себя позиционирующие машины, где требуется высокая точность, и приводы роботов .
- Они сохранят свое положение, когда постоянный ток подается как на статор, так и на обмотки ротора.
- Часы, приводимые в действие синхронным двигателем, в принципе так же точны, как частота сети его источника питания. (Хотя небольшие отклонения частоты будут происходить в течение любых заданных нескольких часов, операторы сети активно регулируют частоту сети в более поздние периоды для компенсации, тем самым поддерживая точность тактовых импульсов с приводом от двигателя; см. электросети .)
- Повышенная эффективность в низкоскоростных приложениях (например, в шаровых мельницах ).
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Способы пуска
Пуск синхронных электродвигателей можно осуществить тремя способами – с помощью дополнительного двигателя, асинхронный и частотный запуск. При выборе способа учитывается конструкция ротора.
Он выполняется с постоянными магнитами, с электромагнитным возбуждением или комбинированным. Наряду с обмоткой возбуждения на роторе смонтирована короткозамкнутая обмотка – беличья клетка. Её также называют демпфирующей обмоткой.

Запуск с помощью разгонного двигателя
Этот метод пуска редко применяется на практике, потому что его сложно реализовать технически. Требуется дополнительный электродвигатель, который механически соединен с ротором синхронного двигателя.
С помощью разгонного двигателя раскручивается ротор до значений близких к скорости вращения поля статора (к синхронной скорости). После чего на обмотку возбуждения ротора подают постоянное напряжение.
Контроль осуществляется по лампочкам, которые включены параллельно рубильнику, подающему напряжение на обмотки статора. Рубильник должен быть отключен.
В первоначальный момент лампы мигают, но при достижении номинальных оборотов они перестают гореть. В этот момент подают напряжение на обмотки статора. После чего синхронный электродвигатель может работать самостоятельно.
Затем дополнительный мотор отключается от сети, а в некоторых случаях его отсоединяют механически. В этом состоят особенности пуска с разгонным электродвигателем.
Асинхронный запуск
Метод асинхронного пуска на сегодня самый распространенный. Такой запуск стал возможен после изменения конструкции ротора. Его преимущество в том, что не нужен дополнительный разгонный двигатель, так как дополнительно к обмотке возбуждения в ротор вмонтировали короткозамкнутые стержни беличьей клетки, что дало возможность запускать его в асинхронном режиме. При таком условии этот способ пуска и получили широкое распространение.
Сразу же рекомендуем просмотреть видео по теме:
При подаче напряжения на обмотку статора происходит разгон двигателя в асинхронном режиме. После достижения оборотов близких к номинальным, включается обмотка возбуждения.
Электрическая машина входит в режим синхронизма. Но не все так просто. Во время пуска в обмотке возбуждения возникает напряжение, которое возрастает с ростом оборотов. Оно создает магнитный поток, который воздействует на токи статора.
При этом возникает тормозящий момент, который может приостановить разгон ротора. Для уменьшения вредного воздействия обмотки возбуждения подключают к разрядному или компенсационному резистору. На практике эти резисторы представляют собой большие тяжелые ящики, где в качестве резистивного элемента используются стальные спирали. Если этого не сделать, то из-за возрастающего напряжения может произойти пробой изоляции. Что повлечет выход оборудования из строя.
После достижения подсинхронной частоты вращения, от обмотки возбуждения отключаются резисторы, и на нее подается постоянное напряжение от генератора (в системе генератор-двигатель) или от тиристорного возбудителя (такие устройства называются ВТЕ, ТВУ и так далее, в зависимости от серии). В результате чего двигатель переходит в синхронный режим.
Недостатками этого метода являются большие пусковые токи, что вызывает значительную просадку напряжения питающей сети. Это может повлечь за собой остановку других синхронных машин, работающих на этой линии, в результате срабатывания защит по низкому напряжению. Для уменьшения этого воздействия цепи обмоток статора подключают к компенсационным устройствам, которые ограничивают пусковые токи.
Частотный пуск
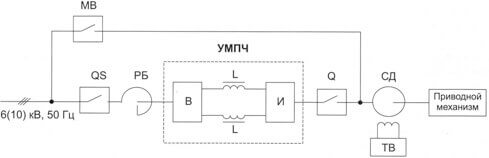
Частотный пуск синхронных двигателей применяется для запуска устройств большой мощности (от 1 до 10 МВт) с рабочим напряжением 6, 10 Кв, как в режиме легкого запуска (с вентиляторным характером нагрузки), так и с тяжелым пуском (приводов шаровых мельниц). Для этих целей выпускаются устройства мягкого частотного пуска.
Принцип работы аналогичен высоковольтным и низковольтным устройствам, работающим по схеме преобразователя частоты. Они обеспечивают пусковой момент до 100% от номинала, а также обеспечивают запуск нескольких двигателей от одного устройства. Пример схемы с устройством плавного пуска вы видите ниже, оно включается на время запуска двигателя, а затем выводится из схемы, после чего двигатель включается в сеть напрямую.
Применение сопротивления при пуске
Метод применим для асинхронных двигателей, подключаемых к однофазной сети, и имеющих первичную дополнительную обмотку с короткозамкнутым ротором. Так называют мотор с расщепленной фазой, электроцепь которого имеет высокое активное сопротивление.
Чтобы пустить в ход двигатель, питаемый от однофазной сети, необходим пусковой резистор, соединяемый последовательно с дополнительной намоткой. Тогда сдвиг фаз составляет 30 градусов. Этого хватает для разгона. Ниже представлена схема, согласно которой достигается омический сдвиг фаз.
Вместо резистора можно применить дополнительную обмотку высокого сопротивления, но низкой индуктивности. В этом случае намотка имеет мало витков, которые выполняются из провода меньшего сечения в отличие от того, что используется для рабочей намотки.
В России с конвейера выходят моторы, подключаемые к однофазной сети, оснащенные резистором для сдвига фаз. Их мощность варьируется в диапазоне 18-600 Вт. Двигатели рассчитаны для сетей с напряжением 127, 220 или 380 Вольт и переменным током с частотой 50 Гц.
Подключение однофазного синхронного электродвигателя
Несмотря на сложность конструкции синхронных двигателей, они имеют много преимуществ перед асинхронными. Главное – это низкая чувствительность к скачкам напряжения, ведущих к резкому уменьшению или увеличению силы тока. Не менее значим и тот факт, что синхронные моторы могут работать даже с перегрузкой, не говоря уже об оптимальном режиме реактивной энергии и вращении вала с постоянной скоростью. Однако подключение – трудоемкий процесс, и это уже недостаток.
Метод разгона
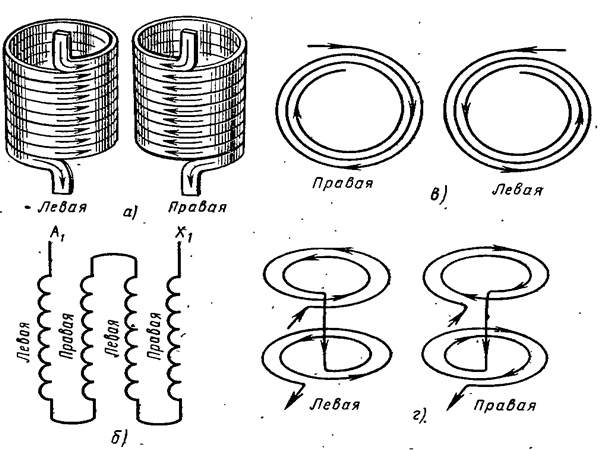
Нельзя пустить в ход однофазный синхронный двигатель, просто подав питание на его обмотки. Потому что в момент включения направление питающего тока в статорных намотках соответствует рисунку (а). В это время на ротор, который еще находится в состоянии покоя, действует пара сил, которая будет пытаться крутить вал по часовой стрелке. Но через половину периода в статорных намотках ток поменяет свое направление. Поэтому пара сил будет уже действовать в обратном направлении, поворачивая вал против часов стрелки, как на рисунке (б). Поскольку ротор обладает большой инертностью, он так и не сдвинется с места.
Чтобы заставить ротор вращаться, необходимо, чтобы он успевал сделать хотя бы половину оборота, чтобы изменение направления тока не повиляло на его вращение. Это возможно, если разогнать вал при помощи посторонних сил. Это можно сделать двумя путями:
- Вручную;
- С использованием второго двигателя.
Собственной силой рук можно разогнать только маломощные синхронные электродвигатели. А для средне- и высокомощных агрегатов придется использовать другой мотор.
При разгоне с посторонней силой ротор начинает вращаться со скоростью, близкой к синхронной. Потом только включается обмотка возбуждения, и затем – статорная намотка.
Асинхронный пуск синхронного мотора
Если в наконечниках на полюсах ротора уложены стержни из металла, и они соединены между собой по бокам кольцами, то мотор должен запускаться асинхронным методом. Эти стержни играют роль вспомогательной обмотки, которая есть у асинхронного двигателя. При этом намотку возбуждения закорачивают с помощью разрядного резистора, а статорную обмотку подключают к сети. Только так можно обеспечить такой же разгон, как и у асинхронного электродвигателя. Но после того, как скорость вращения максимально приблизится к синхронной (достаточно 95% от нее), намотку возбуждения соединяют с источником постоянного тока. Скорость становится полностью синхронной, что влечет за собой снижение ЭДС индукции вспомогательной обмотки вплоть до нуля. И она отключается автоматически.
Схема и способ подключения вашего двигателя будет зависеть от того, какой он у вас: синхронный или асинхронный. В учет идет также мощность мотора, а также способ пуска: с нагрузкой или без. Разобраться в рисунках вам поможет элементарное понимание механики и электромагнитных явлений.
Подключение треугольником
Схема «треугольник» отличается от предыдущей тем, что обмотки соединяются последовательно. Тогда конец первой обмотки соединяется с началом второй, конец которой – с началом третьей, вывод которой – с началом первой.
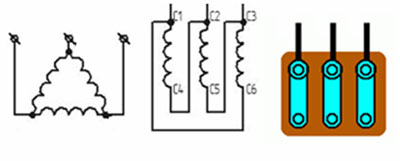

Преимущество способа заключается в том, что он обеспечивает достижение максимальной мощности. Но при запуске двигателя образуются высокие пусковые токи, которые могут привести к уничтожению изоляции. Поэтому не рекомендуется подавать высокое напряжение.
Треугольное соединение используется для подключения однофазного двигателя к однофазной сети 127 или 220 Вольт. Она же применяется для трехфазных электродвигателей с двумя номинальными напряжениями при включении в однофазную сеть (только на меньшее значение):
- Мотор 220 380 к сети с напряжением 220 Вольт;
- Мотор 127 220В к сети с вольтажом 127 единиц.
С технической точки зрения для высокого значения номинального напряжения схема «треугольник» тоже подходит. Но ввиду высоких пусковых токов это нецелесообразно и очень опасно: изоляция сгорит от тепла, выделяемого обмоткой.
Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Советуем изучить — Подключение датчиков температуры
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
Область применения
Область применения синхронных двигателей обусловлена рядом их особенностей, а именно:
- — стабильностью частоты вращения как при колебании напряжения в питающей электросети, так и при изменении величины механической нагрузки на валу;
- — возможностью работы с очень высоким коэффициентом мощности — вплоть до единицы.
Первое качество делает синхронные двигатели незаменимыми в качестве приводных для прецизионных обрабатывающих станков. Также часто синхронные двигатели используются для привода мощных насосных, компрессорных и вентиляционных установок. Этим же свойством обусловлено их практически исключительное применение в качестве гидрогенераторов и турбогенераторов на электрических станциях.Вторая особенность синхронных двигателей делает привлекательным его использование в качестве источника реактивной энергии, что позволяет гибко регулировать значение коэффициента мощности и уровня напряжения в сети. При правильном заключении договоров на электроснабжение можно получить экономию средств, имея повышенное значение косинуса-фи.При работе синхронного двигателя с коэффициентом мощности, равном единице, двигатель потребляет из сети только активную мощность, за счет чего снижаются потери мощности в питающих линиях электропередачи. Это обусловлено тем, что потери в линиях пропорциональны полной электрической мощности, а величина последней в рассматриваемом случае снижается, что происходит за счет уменьшения реактивной составляющей вплоть до нуля.Работающий на холостом ходу в режиме перевозбуждения синхронный двигатель представляет собой синхронный компенсатор.
Мощный синхронный двигатель, оснащенный системами автоматической регулировки возбуждения с обратной связью по напряжению, а также форсирования тока возбуждения – это инструмент для регулирования и перераспределения потоков реактивной мощности и уровня напряжения в электрической сети.Выбор синхронных двигателей при проектировании и в процессе реконструкции электросетей крупных потребителей обеспечивает повышение устойчивости работы энергосистемы, разгрузку линий электропередачи, улучшение качества электроэнергии, дает возможность минимизировать затраты на покупку электрической энергии.
Схема включения
Возможно подключение нагрузок к трехфазной сети по двум схемам — звездой и треугольником. При подключении звездой начала обмоток соединяются между собой, а концы подключаются к фазам. При включении треугольником конец одной обмотки подключается к началу другой.
В схеме включения звездой обмотки оказываются под фазным напряжением 220 В., при включении треугольником — под линейным 380 В.
При включении треугольником двигатель развивает не только большую мощность, но и большие пусковые токи. Поэтому иногда используют комбинированную схему — старт звездой, затем переключение в треугольник.
Направление вращения определяется порядком подключения фаз. Для изменения направления достаточно поменять местами любые две фазы.
Типы синхронных электродвигателей
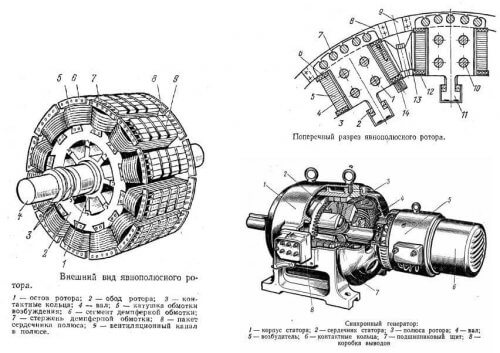
Cинхронный электродвигатель с обмоткой возбуждения
Синхронный электродвигатель с обмоткой возбуждения имеет явнополюсный ротор с электромагнитным возбуждением. Для создания постоянного магнитного поля ротора требуется источник постоянного тока. Обмотки ротора двигателя соединены с контактными кольцами к которым через щетки подводится постоянный ток. Преимуществом данных двигателей является отсутствие дорогостоящих магнитов, недостатком — наличие щеток и необходимость питания обмоток ротора.
Cинхронный электродвигатель с постоянными магнитами
Данный двигатель имеет ротор с постоянными магнитами. В отличии от коллекторного двигателя постоянного тока функции коллектора и щеток выполняют полупроводниковые ключи. Имеет такие же преимущества, что и коллекторный двигатель постоянного тока, при этом не требует текущего ремонта (бесщеточный) в процессе эксплуатации. Такой электродвигатель требует сложной системы управления. Бесщеточные синхронные электродвигатели с постоянными магнитами обладают рядом преимуществ над другими двигателями, обладая лучшими показателями: мощность/объем, КПД, момент/инерция и др.
Синхронный реактивный электродвигатель
Синхронный электрический двигатель с ротором из ферромагнитного материала. Принцип действия синхронного реактивного электродвигателя основан на свойствах ферромагнитных тел ориентироваться так, чтобы сцепленный с ним магнитный поток оказался максимальным. Основным преимуществом электродвигателя является: простота и низкая цена изготовления. При одинаковых размерах, реактивный электродвигатель развивает больший момент, чем асинхронный, но имеет более низкий коэффициент мощности. Данный электродвигатель для работы требует систему управления.
Гистерезисный электродвигатель
Синхронный электродвигатель с неявнополюсным гистерезисным ротором. Вращающий момент этого электродвигателя создается за счет магнитного гистерезиса материала ротора. Достоинствами гистерезисных двигателей являются простота устройства, надежность в эксплуатации, отсутствие пусковых приспособлений, плавность втягивания в синхронизм, практически неизменный ток при пуске и работе. К недостаткам можно отнести относительно высокую стоимость материала ротора.
Шаговый электродвигатель
Синхронный бесщеточный электродвигатель, который без устройств обратной связи преобразует сигнал управления в угловое перемещение ротора с фиксацией его в заданном положении. Главное преимущество шаговых электродвигателей — точность, а также возможность осуществлять позиционирование и регулировать скорость без датчика обратной связи.
Принцип работы реактивного двигателя
Переменный ток, проходящий по обмоткам статора, создает в воздушном зазоре электродвигателя. создается, когда ротор пытается установить свою наиболее магнито проводящую ось (d-ось) с приложенным полем, для того чтобы минимизировать магнитное сопротивление в магнитной цепи. Амплитуда момента прямо пропорциональна разницы между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент.
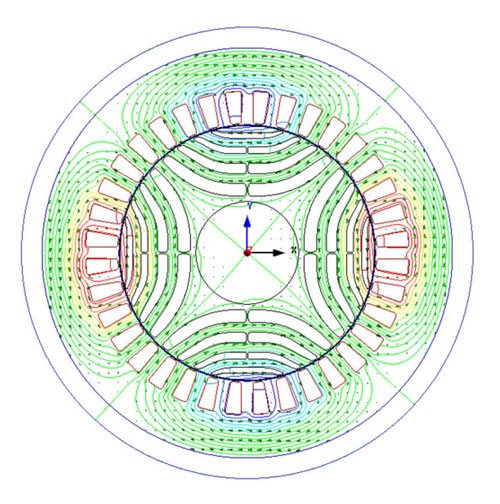
Линии магнитного поля синхронного реактивного электродвигателя
Главная идея может быть объяснена с помощью рисунка представленного ниже. Объект «a» состоящий из анизотропного материала имеет разную проводимость по оси d и оси q, в то время как изотропный магнитный материал объекта «b» имеет одинаковую проводимость во всех направлениях. Магнитное поле, которое прикладывается к анизотропному объекту «a», создает вращающий момент если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта «a» не совпадает с линиями магнитного поля, объект будет вносить искажения в магнитное поле. При этом направление искаженных магнитных линий будут совпадать с осью q объекта.
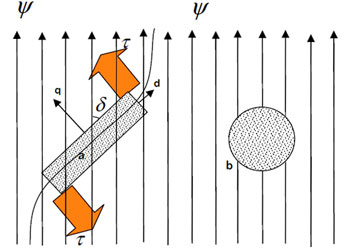
Объект с анизотропной геометрией (a) и изотропной геометрией (b) в магнитном поле
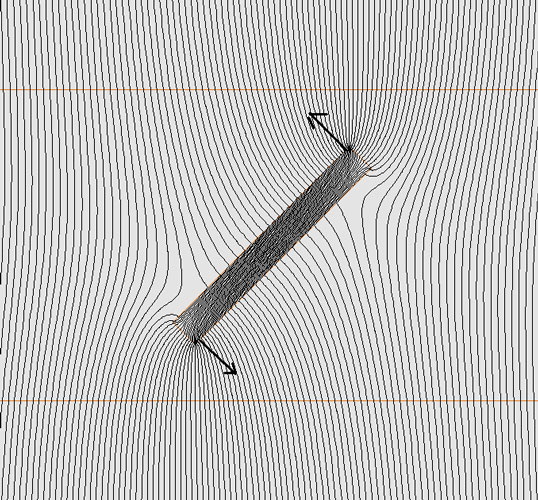
Силовые линии магнитного поля вокруг объекта с анизотропной геометрией
В синхронном реактивном электродвигателе магнитное поле создается синусоидально распределенной обмоткой статора. Поле вращается с синхронной скоростью и может считаться синусоидальным.
В такой ситуации всегда будет существовать момент направленный на то, чтобы уменьшить полную потенциальную энергию системы, путем уменьшения искажения поля по оси q (). Если угол сохранять постоянным, например путем контроля магнитного поля, тогда электромагнитная энергия будет непрерывно преобразовываться в механическую.
Ток статора отвечает за намагничивание и за создание момента, который пытается уменьшить искаженность поля. Управление моментом осуществляется путем контроля фазы тока, то есть угла между вектором тока обмоток статора и d-осью ротора во вращающейся системе координат.